Ever tried integrating a navigation system, only to realize it doesn’t give position at all?
That happens when people confuse an IMU with an INS. It sounds technical, but the consequences are real: wrong hardware choices, wasted budget, and systems that simply don’t work as expected. The fix? Understanding the key differences between IMU, INS, and what each one is actually designed to do. This guide will walk you through it—all in plain English.
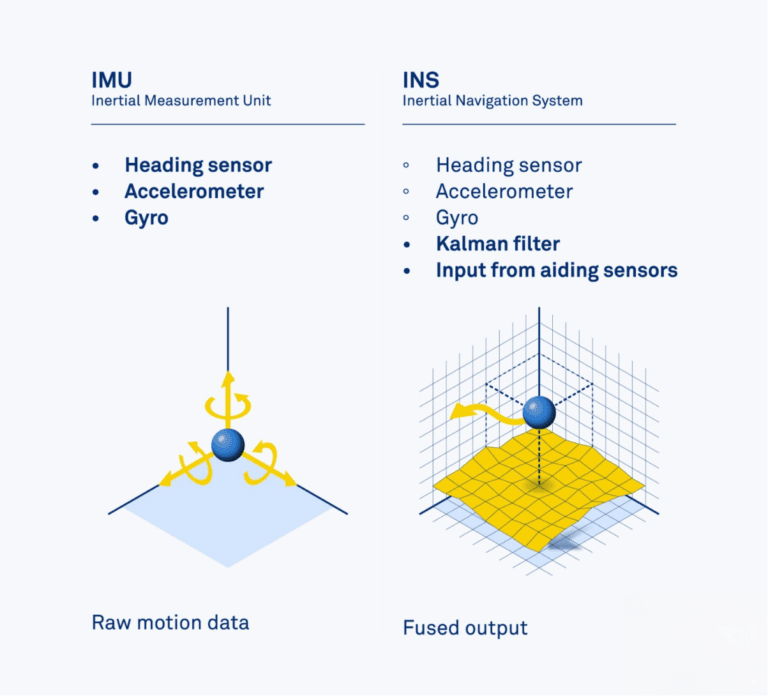
An IMU measures motion, while an INS uses IMU data to compute position and orientation over time—IMU is a sensor, INS is a system.
Let’s clear up the confusion—step by step.
Table of contents

What Is an IMU?
An Inertial Measurement Unit (IMU) is a sensor device that measures acceleration and angular velocity. Typically built with MEMS, FOG, or HRG technologies, an IMU includes accelerometers, gyroscopes, and sometimes magnetometers. It outputs raw inertial data used to estimate movement in space. IMUs are widely used in UAVs, robotics, vehicles, and smartphones. However, on their own, they don’t provide position or orientation, unless integrated with additional processing. IMUs vary in precision, from low-cost commercial-grade to tactical and navigation-grade sensors like GuideNav’s GMS400.

What Is an INS?
An Inertial Navigation System (INS) is a complete system that uses IMU data to calculate position, velocity, and attitude in real-time. It typically includes:
- An embedded IMU
- A powerful onboard processor
- Sensor fusion algorithms (e.g., Kalman Filter)
- Often, a GNSS module for aiding
The INS performs real-time integration of IMU outputs to provide a continuous navigation solution. Because of this, it can operate even in GNSS-denied environments for a limited time, making it essential in aerospace, maritime, and autonomous missions. Systems like GuideNav’s GFS120 and GUIDE2D exemplify such integration.
How Are IMUs and INSs Different?
Most people simplify it by saying: “An INS is just an IMU with a GNSS module.” Technically, that’s a start—but it’s far from the whole picture.
Yes, an INS includes an IMU at its core. But it also integrates a processor, GNSS (often with RTK or SBAS support), and sometimes external aiding sensors like wheel encoders, airspeed sensors, barometric altimeters, or Doppler Velocity Logs (DVL). These additions allow the INS to fuse data in real time, delivering not just motion—but high-confidence estimates of position, velocity, and orientation.
Think of an IMU as a thermometer—it tells you the raw data. The INS is the weather report: filtered, fused, and ready to act on.
| Feature | IMU | INS |
|---|---|---|
| Core Function | Measures acceleration & rotation | Calculates full position, velocity, orientation |
| Components | Accelerometer, Gyroscope | IMU + GNSS + Processor + Optional sensors |
| Output | Raw motion data | Fused navigation data (real-time) |
| GNSS Support | None | Built-in (RTK/SBAS optional) |
| External Aiding | Not applicable | Odometer, DVL, airspeed, altimeter, etc. |
Can You Navigate with Just an IMU?
Think of an IMU like feeling motion with your eyes closed. You can tell you’re moving forward or turning—but you have no idea where you are. That’s what happens when you try to navigate using only an IMU.
Sure, you can integrate acceleration over time to estimate position. But tiny errors build up quickly, turning into huge mistakes within seconds. This is called drift, and it makes standalone IMUs unreliable for navigation.
They’re great for short-term stabilization—like keeping a gimbal level—but not for figuring out where you are or where you’re going. For that, you need an INS.
How Does an INS Process IMU Data?
Unlike an IMU, which only senses motion, an INS interprets that motion and transforms it into full navigation insight. This includes knowing where you are, how fast you’re moving, and which direction you’re facing. But it doesn’t happen automatically. It requires a chain of carefully designed steps—combining physics, math, and real-time correction—to turn raw signals into reliable navigation.
Let’s walk through the process:
1. Sense Motion (IMU Input)
It all starts with the IMU, which continuously measures acceleration (via accelerometers) and angular rate (via gyroscopes). These values reflect how the system moves in 3D space.
➡ This step gives the INS its raw motion awareness.
2. Calculate Velocity and Position
The INS integrates acceleration to get velocity, then integrates velocity to estimate position over time. This tells the system how far it has traveled from its starting point.
➡ This is how the INS tracks movement—even without GPS.
3. Estimate Orientation
By processing gyroscope data and referencing vectors like gravity and Earth’s magnetic field, the INS determines roll, pitch, and yaw—your full 3D orientation.
➡ This step helps the system understand how it’s rotated or tilted.
4. Apply Sensor Fusion for Accuracy
IMU data alone drifts over time. The INS uses smart algorithms—like Kalman Filters—to combine IMU input with other sensors:
- GNSS / RTK / SBAS
- Wheel odometers
- DVL or airspeed sensors
- Barometric altimeters
These corrections dramatically improve accuracy and long-term stability.
➡ Fusion keeps the system reliable, even when some sensors lose signal.
5. Deliver Real-Time Navigation Output
The final output is a continuous, real-time stream of position, velocity, and attitude data—refreshed many times per second, and ready for use by flight controllers, autopilots, or mapping systems.
➡ This is what makes the INS a complete navigation solution.
GuideNav’s INS products follow this architecture—with fusion engines tuned for GNSS-denied conditions, dynamic environments, and platforms with high vibration. The result: dependable navigation you can trust when it matters most.
When Is an IMU Enough for Your Application?
An IMU is all you need if your system just needs to sense motion, not calculate position or heading over time. It’s ideal when you’re reacting to movement, not trying to track absolute location.
Common use cases include:
Camera stabilization
Detects vibration or tilt to help motors keep the camera steady.
Gesture tracking
In AR/VR or wearables, where you follow motion—not exact position.
Short-term orientation
Used in drones or robots during startup, hovering, or quick maneuvers.
Flight control support
Paired with GNSS or optical flow, IMUs provide fast feedback for drone stabilization.
Just keep in mind: IMUs only give raw acceleration and rotation. If you need orientation or speed, you’ll have to build the math yourself—filters, drift correction, and more.
If that’s within your system’s capability, an IMU is a lightweight, affordable, and efficient solution.
When Do You Really Need a Full INS?
You need a full INS when your system must know exact position and orientation at all times—especially in environments where GNSS may fail or isn’t available.
Typical use cases include:
- GNSS-denied environments:like tunnels, indoors, underwater, or urban canyons
- High-dynamic platforms:such as drones, missiles, and off-road vehicles that need fast, accurate updates
- Dead reckoning:where the system must maintain navigation between GNSS signals—or without GNSS at all
- Precision-critical tasks:such as mapping, targeting, or autonomous driving
In these situations, an IMU alone would drift quickly, leading to unreliable results. An INS solves this by fusing inertial data with GNSS and optional sensors like DVL, odometers, or altimeters.
What Are the Common Mistakes in Choosing IMU or INS?
Let’s be honest—when it comes to inertial sensors, it’s easy to make the wrong call, especially if you’re new to the field. I’ve seen teams pick the wrong tool more times than I can count. And it’s rarely about the technology—it’s about misunderstanding the problem.

Here’s where things usually go off track:
Mistake #1: Thinking an IMU gives you position
It doesn’t. An IMU only tells you how fast you’re moving or turning. If you’re hoping for real-time coordinates out of the box—you’ll be disappointed.
Mistake #2: Using an entry-level IMU for a demanding job
A low-cost sensor might look good on paper, but once you strap it to a fast-moving drone or robot, the noise and drift will ruin your data.
Mistake #3: Paying for an INS when an IMU would’ve done the trick
If all you need is to stabilize a camera or detect basic orientation, a full INS is overkill. Don’t solve a $300 problem with a $3000 solution.
Mistake #4: Forgetting the real-world environment
Lab specs don’t always reflect field performance. High vibration, extreme temperatures, or shock loads can throw off cheap sensors fast.
Mistake #5: Underestimating integration effort
Raw IMU data isn’t plug-and-play. If you don’t have the right software, filters, or algorithms in place, even the best sensor will underdeliver.
What Support Does GuideNav Offer for IMU/INS Selection?
At GuideNav, we don’t just ship sensors—we help you build the right system. We offer:
- One-on-one application consulting
- IMU/INS performance matching
- Integration guides for UAVs, UGVs, and maritime systems
- Datasheet access and evaluation kits
- Rapid response engineering support
Whether you’re building a low-power UAV or a GNSS-denied navigation system, we help you select between MEMS IMU, FOG IMU, or complete INS based on your mission profile.