
Unidad de medición inercial (IMU) de confianza mundial
Unidad de medida inercial
Más de 15.000 sistemas IMU en funcionamiento en más de 35 países
Soluciones personalizadas en las que confían actores clave a nivel mundial
Las soluciones de unidades de medición inercial (IMU) de GuideNav están diseñadas para ofrecer un rendimiento excepcional en aplicaciones aeroespaciales, de defensa e industriales. Ya sea que necesite la IMU MEMS compacta y económica o la IMU FOG de ultraalta precisión, le ofrecemos tecnología de vanguardia, confiable en los entornos más exigentes.
Modelo IMU basado en MEMS destacado de Guidenav
MODELOS DE IMU MEMS DESTACADOS
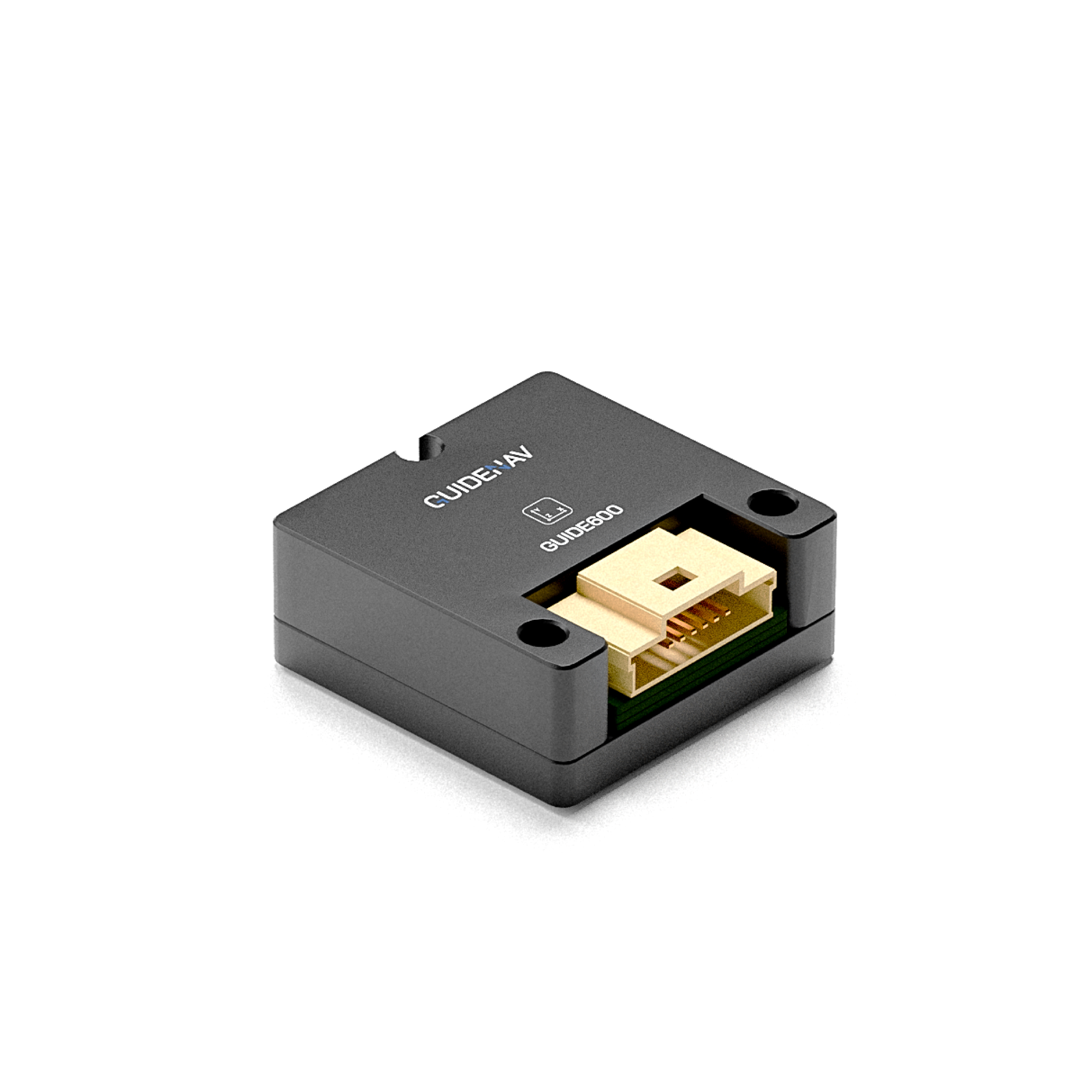
- Rentable
- Alcance del giroscopio: ± 500 °/s
- Inestabilidad de sesgo: ≤ 2 °/h
- Estabilidad de polarización: ≤ 10°/h
- Peso: ≤ 10g
- Protocolo: UART

- IMU MEMS de 10 ejes
- Alcance del giroscopio: ± 450 °/s
- Inestabilidad de sesgo: ≤ 2°/h
- Estabilidad de sesgo: ≤ 4°/h
- Peso: ≤ 40g
- Protocolo: SPI
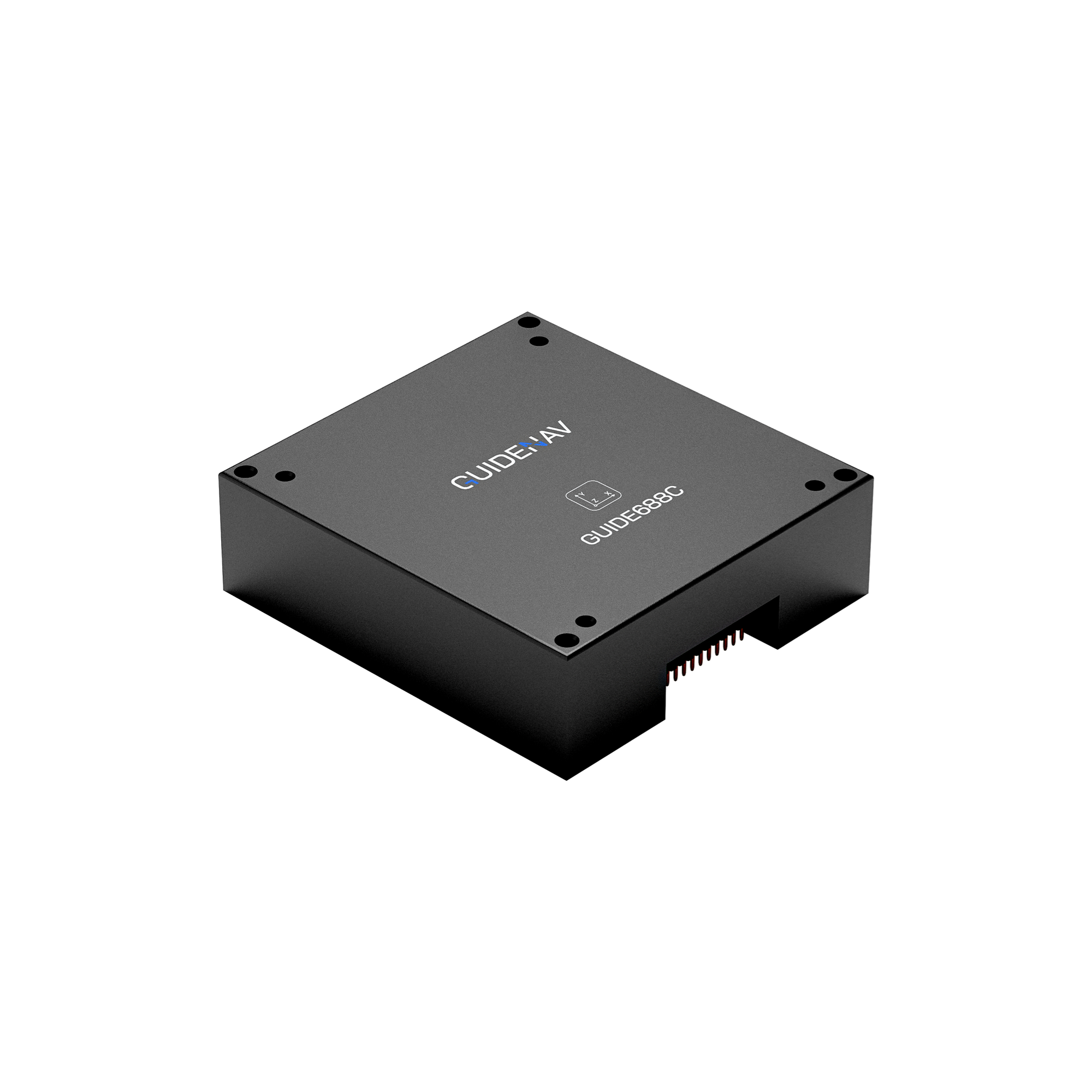
- IMU MEMS de 10 ejes
- Alcance del giroscopio: ± 450 °/s
- Inestabilidad de sesgo: ≤ 0,8 °/h
- Estabilidad de sesgo: ≤ 3°/h
- Peso: ≤ 40g
- Protocolo: SPI

- Precisión media-alta
- Alcance del giroscopio: ± 320 °/s
- Inestabilidad de sesgo: ≤ 0,4 °/h
- Estabilidad de sesgo: ≤ 2°/h
- Peso: ≤ 10g
- Protocolo: RS422

- Amplio rango de giroscopio
- Alcance del giroscopio: ± 2000 °/s
- Inestabilidad de sesgo: ≤ 3 °/h
- Estabilidad de polarización: ≤ 10°/h
- Peso: ≤ 30g
- Protocolo: UART

- GUN-HARD hasta 20.000 g
- Alcance del giroscopio: hasta 6000 °/s
- Inestabilidad de sesgo: ≤ 3°/h
- Estabilidad de polarización: ≤ 10°/h
- Peso: ≤ 50g
- Protocolo: UART

- Alta precisión
- Alcance del giroscopio: ± 450 °/s
- Inestabilidad de sesgo: ≤ 0,2 °/h
- Estabilidad de sesgo: ≤ 1°/h
- Peso: ≤ 40g
- Protocolo: RS422

- Precisión ultraalta
- Alcance del giroscopio: ± 400 °/s
- Inestabilidad de sesgo: ≤ 0,1 °/h
- Estabilidad de polarización: ≤ 0,5°/h
- Peso: ≤ 55g
- Protocolo: RS422
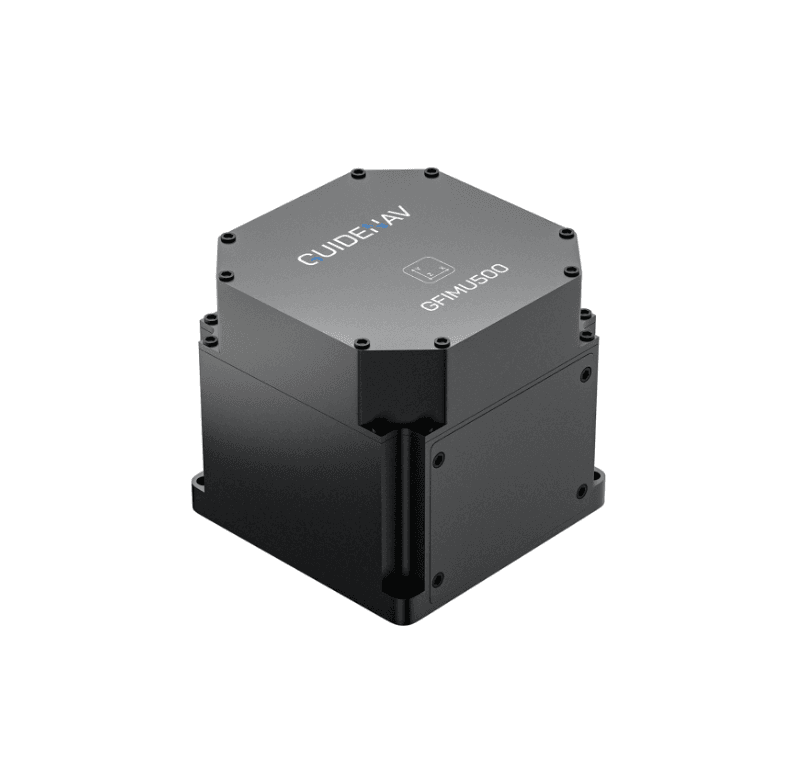
Unidad de medición inercial basada en fibra óptica destacada de Guidenav
MODELOS DE IMU DESTACADOS FOG

- Precisión media
- Estabilidad de sesgo (10 s) ≤0,1°/h
- Paseo aleatorio angular del giroscopio: ≤0,02 grados/√h
- Rango de ± 500 °/s
- Peso: <900 gramos
- Precisión media-alta
- Estabilidad de sesgo (10 s) ≤0,05°/h
- Paseo aleatorio angular del giroscopio: ≤0,005 grados/√h
- Rango de ± 500 °/s
- Peso: <1200 gramos

- Alta precisión
- Estabilidad de sesgo (10 s) ≤0,01°/h
- Paseo aleatorio angular del giroscopio: ≤0,0005 grados/√h
- Rango de ± 300 °/s
- Peso: <5000 gramos
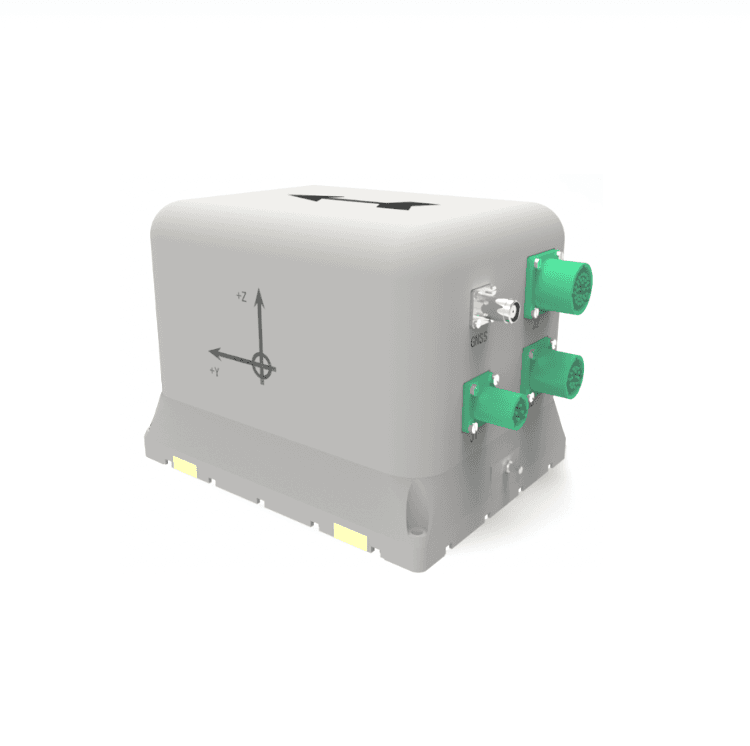
- Precisión ultraalta
- Estabilidad de polarización (10 s) ≤0,005°/h
- Paseo aleatorio angular del giroscopio: ≤0,0003 grados/√h
- Rango de ± 500 °/s
- Peso: <5000 gramos
Obtenga su solución personalizada ahora
Su proyecto merece una solución adaptada a sus especificaciones exactas. Para garantizar que proporcionamos las mejores Unidades de Medición Inercial (IMU) para sus necesidades, le invitamos a compartir los parámetros específicos y los requisitos de rendimiento de sus aplicaciones. Ya sea por precisión, estabilidad o limitaciones de tamaño, nuestro equipo está listo para ayudarle a encontrar la solución perfecta.
Tabla de contenido
Descargar esta página en formato PDF
Para ahorrarte tiempo también hemos preparado una versión PDF con todo el contenido de esta página, solo deja tu email y recibirás el enlace de descarga inmediatamente.
Presentación de la unidad de medida inercial (IMU)
¿Qué es la unidad de medida inercial?
Una Unidad de Medición Inercial (IMU) es un dispositivo que mide la aceleración, la velocidad angular y, en ocasiones, el campo magnético de un objeto, proporcionando datos sobre su movimiento y orientación. Generalmente consta de acelerómetros, giroscopios y, en ocasiones, magnetómetros. Las IMU son cruciales para sistemas que requieren una navegación precisa, como los sectores aeroespacial, de defensa y robótico, donde ayudan a mantener un posicionamiento y una estabilidad precisos sin depender de referencias externas como el GPS.
Aplicaciones de la unidad de medida inercial (IMU)
Aplicaciones de la unidad de medida inercial (IMU)
01
Aeroespacial y aviación
Las IMU son vitales para la navegación y el control de aeronaves. Ayudan a mantener la orientación y proporcionan datos en tiempo real a los sistemas de piloto automático, lo que ayuda a las aeronaves a mantener su rumbo y mejora la seguridad del vuelo.
02
Defensa y Militar
Las IMU se utilizan ampliamente en misiles, drones y vehículos militares para proporcionar seguimiento de movimiento, navegación y guiado de objetivos precisos. Permiten que los sistemas autónomos funcionen con precisión incluso en entornos sin GPS.
03
Vehículos autónomos y drones
En los automóviles autónomos y los drones, las IMU proporcionan información continua sobre la orientación, la velocidad y el movimiento, lo que ayuda a estabilizar el vuelo y garantizar una navegación precisa en entornos complejos.
04
Robótica
Las IMU son fundamentales en robótica para el control preciso del movimiento. Se utilizan en robots para rastrear la posición y la orientación, lo que permite un movimiento eficiente y autónomo en robots industriales, médicos y de servicios.
05
Levantamiento geofísico
En la exploración geofísica, las IMU se utilizan en equipos para detectar y medir movimientos sísmicos, proporcionando datos valiosos para la investigación científica y la exploración de recursos.


¿Por qué una unidad de medida inercial?
¿Por qué elegir una IMU en lugar de solo un giroscopio?
Si bien tanto las unidades de medición inercial (IMU) como los giroscopios miden la velocidad angular, una IMU ofrece una solución más completa al combinar múltiples sensores para ofrecer una gama más amplia de datos de movimiento y orientación. Estas son las principales razones
Seguimiento de movimiento integral
Mientras que un giroscopio mide solo la velocidad angular, una IMU combina acelerómetros y, a veces, magnetómetros para rastrear tanto la aceleración lineal como la rotación angular, ofreciendo un perfil de movimiento 3D completo.Posicionamiento más preciso.
Los giroscopios pueden sufrir desviaciones con el tiempo. Una IMU corrige esto utilizando datos del acelerómetro, lo que proporciona una orientación y un posicionamiento más estables y precisos durante periodos más largos.Mejor rendimiento en entornos sin GPS:
Las IMU son ideales para aplicaciones donde el GPS no está disponible, como en interiores, bajo el agua o en el espacio, ya que miden tanto la aceleración como la rotación, ofreciendo datos de navegación completos.Diseño de sistema simplificado
Una IMU integra múltiples sensores en una unidad compacta, lo que reduce la complejidad del sistema y la necesidad de acelerómetros y giroscopios separados.




Parámetros clave de la unidad de medida inercial (IMU)
Especificaciones principales de una unidad de medida inercial (IMU)
Inestabilidad de sesgo (giroscopio)
: Mide la estabilidad del giroscopio a lo largo del tiempo sin entradas externas, y se expresa normalmente en °/h. Valores más bajos indican mayor estabilidad, lo cual es fundamental para aplicaciones de precisión como la navegación y el guiado.El valor de "Angle Random Walk"
indica el nivel de ruido en las mediciones de velocidad angular, expresado en °/√h. Un valor menor de "random walk" garantiza un mejor rendimiento en operaciones a largo plazo.Rango de medición:
Especifica la aceleración máxima (g) o la velocidad angular (°/s) que la IMU puede medir. Un rango más amplio le permite funcionar en entornos más dinámicos.Ancho de banda
Define la rapidez con la que la IMU puede responder a los cambios, normalmente medidos en Hz. Un mayor ancho de banda admite aplicaciones que requieren actualizaciones de datos rápidas, como drones o robótica.La tolerancia ambiental
incluye el rango de temperatura de funcionamiento y la resistencia a vibraciones e impactos. Esto garantiza que la IMU funcione de forma fiable en condiciones adversas, como en aplicaciones aeroespaciales o militares.
IMU MEMS vs. IMU de fibra óptica: ¿cuál es mejor?
La elección entre las IMU MEMS y de giroscopio de fibra óptica (FOG) depende de los requisitos específicos de su proyecto. Las IMU MEMS estándar son compactas, rentables e ideales para aplicaciones con necesidades de precisión moderadas. Sin embargo, los avances tecnológicos actuales permiten las IMU MEMS de alta precisión alcancen una inestabilidad de sesgo de tan solo 0,1°/h, lo que las hace adecuadas para algunas aplicaciones militares y aeroespaciales tradicionalmente dominadas por las IMU FOG.
Sin embargo, las IMU FOG siguen siendo la opción preferida para aplicaciones que exigen una precisión ultraalta, estabilidad a largo plazoy fiabilidad en entornos extremos. A continuación, se muestra una comparación detallada para ayudarle a decidir:
| Característica | Unidad de gestión de impulsos MEMS | IMU de niebla |
|---|---|---|
| Exactitud | Las IMU MEMS estándar ofrecen una precisión moderada. Las IMU MEMS de alta precisión pueden lograr una inestabilidad de sesgo tan baja como 0,1°/h, comparable a la de las IMU FOG de gama básica. | Ofrecen una precisión ultra alta con una inestabilidad de sesgo tan baja como 0,001°/h, lo que los hace ideales para operaciones de larga duración y de misión crítica. |
| Tamaño y peso | Compactos y ligeros, lo que los hace adecuados para sistemas con restricciones estrictas de tamaño y peso, como UAV o robótica. | Más grande y más pesado, diseñado para sistemas donde el rendimiento supera las preocupaciones de tamaño. |
| Tolerancia ambiental | Mayor robustez ante impactos, vibraciones y variaciones de temperatura, especialmente en diseños MEMS avanzados. Fiable para la mayoría de las aplicaciones industriales y militares. | Fiabilidad excepcional en condiciones extremas, que incluyen fuertes impactos, vibraciones y demandas operativas prolongadas. |
| Costo | Más rentables, especialmente para aplicaciones donde la precisión estándar es suficiente. Las IMU MEMS de alta precisión son más asequibles que las IMU FOG, ofreciendo una precisión comparable. | El coste es mayor debido a la compleja tecnología óptica, pero está justificado para sistemas que requieren una estabilidad y precisión incomparables. |
| Aplicaciones | Adecuado para navegación de propósito general en UAV, robótica, sistemas industrialesy algunas aplicaciones de grado militar si se utilizan MEMS de alta precisión. | Preferido para la industria aeroespacial, misiles, submarinosy sistemas de defensa críticos que requieren estabilidad a largo plazo y precisión ultra alta. |
Presentación de la unidad de medida inercial (IMU)
de seis ejes frente a
unidad de medición inercial de nueve ejes
Al explorar las unidades de medición inercial (IMU), es frecuente encontrar términos como "IMU de seis ejes" e "IMU de nueve ejes". Estas descripciones se refieren al número y tipo de sensores integrados en el dispositivo. Comprender la diferencia entre las IMU de seis ejes y las de nueve ejes puede ayudarle a seleccionar el sensor adecuado para su aplicación específica.
| Característica | IMU de seis ejes | IMU de nueve ejes |
|---|---|---|
| Componentes |
Acelerómetro de 3 ejes Giroscopio de 3 ejes |
Acelerómetro de 3 ejes Giroscopio de 3 ejes Magnetómetro de 3 ejes |
| Funcionalidad | Mide la aceleración lineal y la velocidad angular | Mide la aceleración lineal, la velocidad angular y el rumbo absoluto |
| Exactitud | Bueno para la estabilidad a corto plazo | Mayor precisión con menor deriva a lo largo del tiempo |
| Aplicaciones | Drones, Robótica, Electrónica de Consumo | Sistemas de navegación, realidad aumentada, vehículos autónomos |
| Costo | Generalmente más asequible | Generalmente más alto debido al sensor adicional |
Calibración de la unidad de medida inercial
¿Qué es la calibración de la unidad de medida inercial?
La calibración correcta de una Unidad de Medición Inercial (IMU) es fundamental para garantizar su rendimiento con la precisión requerida para su aplicación específica. Sin calibración, los datos de la IMU podrían ser inconsistentes, lo que provocaría un comportamiento defectuoso del sistema. Esto podría afectar la precisión de la navegación en drones, el seguimiento de trayectorias en aplicaciones aeroespaciales o la estabilidad en robótica.
Las IMU suelen constar de acelerómetros, giroscopios y, en ocasiones, magnetómetros. Cada uno de estos sensores puede presentar diversas fuentes de error, como fluctuaciones de temperatura, tensión mecánica o tolerancias de fabricación. Los métodos de calibración ayudan a mitigar estos problemas para garantizar una salida de datos precisa y fiable.
Unidad de medición inercial vs. AHRS vs. INS
IMU vs AHRS vs INS: ¿Cuál es la diferencia?
- IMU (Unidad de Medición Inercial): Mide la aceleración y la velocidad angular. Proporciona datos brutos sobre el movimiento, pero no calcula la orientación ni la posición.
- AHRS (Sistema de referencia de actitud y rumbo): amplía la IMU proporcionando información de orientación (cabeceo, balanceo, guiñada) y rumbo en tiempo real, a menudo incorporando magnetómetros y GPS.
- INS (Sistema de navegación inercial): combina las funciones de la IMU y algoritmos avanzados para proporcionar datos de posición, velocidad y orientación sin depender de referencias externas como el GPS.
| Característica | Unidad de medida intramuscular (IMU) | Sistema de alerta temprana (AHRS) | INS |
|---|---|---|---|
| Objetivo | Mide la aceleración y la velocidad angular | Proporciona orientación en tiempo real (cabeceo, balanceo, guiñada) e información de rumbo | Proporciona datos de navegación completos: posición, velocidad y orientación |
| Sensores | Acelerómetro, giroscopio (a veces magnetómetro) | IMU + Magnetómetro (a veces GPS) | IMU + Algoritmos avanzados (a menudo con GPS o entradas externas) |
| Salida de datos | Datos brutos (aceleración, velocidad angular) | Orientación (cabeceo, balanceo, guiñada), rumbo | Posición, velocidad y orientación a lo largo del tiempo |
| Externo | Requiere sistemas externos (GPS, magnetómetros) para una orientación completa | Utiliza magnetómetros y GPS para corregir la deriva | Funciona de forma independiente (se puede ampliar con GPS) |
| Tipo de IMU FOG | Gama de precios | Solicitud |
|---|---|---|
| IMU FOG de nivel básico | $10,000 - $30,000 | Uso comercial o industrial general, drones, vehículos autónomos básicos |
| IMU FOG de rango medio | $30,000 - $70,000 | Aplicaciones de grado militar, aeroespacial, navegación marina de alta precisión |
| IMU FOG de alta gama | $70,000 - $100,000+ | Aplicaciones críticas (guiado de misiles, aeroespacial, sistemas de defensa de alta precisión) |
¿Cuál es el rango de precios de las IMU FOG?
Rango de precios de
la unidad de medición inercial (IMU) basada en FOG
El precio de una unidad de medición inercial (IMU) basada en un giroscopio de fibra óptica (FOG) puede variar considerablemente según la aplicación específica, los requisitos de rendimiento y las características adicionales. Los factores que influyen en el precio incluyen:
- Especificaciones de rendimiento (por ejemplo, precisión, estabilidad)
- Tamaño, peso y consumo de energía (SWaP-C)
- Protección del medio ambiente (por ejemplo, robustecimiento para condiciones adversas)
- Personalización para necesidades de aplicaciones específicas
Para obtener información sobre precios sobre MEMS IMU, visita nuestra MEMS IMU .
Guía de selección de unidades de medición inercial
¿Cómo seleccionar
la unidad de medida inercial?
PASO 1
Define tu aplicación
¿Cuál es su principal caso de uso? (por ejemplo, aeroespacial, defensa, robótica, automotriz, electrónica de consumo)
¿Qué nivel de exactitud y precisión se requiere? (por ejemplo, subgrado, alta precisión)
PASO 2
Tipo de IMU: MEMS vs. Basado en FOG
- MEMS: asequible, compacto e ideal para precisión baja a media.
- FOG: Alta precisión, confiable y adecuada para aplicaciones exigentes.
PASO 3
Determinar los requisitos de precisión
Elija el nivel de precisión necesario (por ejemplo, grados por hora para giroscopios) según su aplicación.
PASO 4
Tamaño y peso
Asegúrese de que la IMU se ajuste al espacio y las limitaciones de energía de su sistema, especialmente para drones o dispositivos portátiles.
PASO 5
Evaluar las condiciones ambientales
Seleccione una IMU que pueda soportar factores ambientales como temperaturas extremas, golpes y vibraciones.
PASO 6
Opciones de personalización e integración
Asegúrese de que la IMU admita las interfaces y la salida de datos adecuadas para una integración perfecta en su sistema.
Fabricante de unidades de medición inercial
¿Por qué elegir Guidenav?
Con la confianza de los actores clave
Nuestros productos avanzados de navegación inercial cuentan con la confianza de organizaciones líderes de los sectores aeroespacial, de defensa, comercial e industrial de más de 25 países. Nuestra reputación de fiabilidad y precisión nos distingue.
Máximo rendimiento
Nuestros productos ofrecen un rendimiento de primera clase con una excelente estabilidad de polarización. Diseñadas para las aplicaciones más exigentes, nuestras IMU basadas en MEMS pueden alcanzar una inestabilidad de polarización con una precisión de ≤0,1°/h.
Probado en entornos hostiles
Nuestras soluciones están diseñadas para soportar condiciones extremas, proporcionando un rendimiento constante en entornos hostiles.
Excelente rendimiento bajo vibraciones
Nuestra tecnología MEMS y FOG IMU se destaca en entornos de alta vibración, lo que garantiza precisión y estabilidad incluso en los entornos operativos más desafiantes.
Sistema PLUG & PLAY
Nuestros sistemas están diseñados para una fácil integración, ofreciendo soluciones plug-and-play que simplifican la instalación y reducen el tiempo de configuración, permitiéndole concentrarse en su misión.
LIBRE DE ITAR
Nuestros productos no cumplen con los requisitos de ITAR, lo que le ofrece la ventaja de realizar transacciones internacionales más sencillas y reducir los obstáculos regulatorios. Elija GuideNav para operaciones globales fluidas.
Nuestra fábrica: ver para creer








¿Por qué elegirnos?
Soluciones integrales para todas sus necesidades de navegación
Cobertura de grado comercial
Estabilidad de polarización: >0,2°/h
Solución: Giroscopio/IMU/INS basado en MEMS
Aplicaciones: navegación de automóviles, vehículos aéreos no tripulados, transporte, robótica, etc.
Cobertura de grado táctico
Estabilidad de polarización: 0,05°/h-0,2°/h
Solución: Giroscopio/IMU/INS basado en fibra óptica y MEMS
Aplicaciones: operaciones en vehículos blindados, artillería antiaérea, puntería de precisión, etc.
Cobertura de grado de navegación
Estabilidad de polarización: ≤0,05°/h
Solución: Fibra óptica y giroscopio láser de anillo/IMU/INS
Aplicaciones: guiado de medio y largo alcance, aviación militar, satélites




Preguntas frecuentes sobre la unidad de medida inercial
Respuestas a sus preguntas
Las funciones principales de una IMU son proporcionar orientación en tiempo real (como ángulos de cabeceo, alabeo y guiñada) e información de movimiento (como aceleración lineal y velocidad angular). Estos datos ayudan a sistemas como robots, drones, dispositivos móviles o vehículos inteligentes con la navegación, el posicionamiento y el control.
El GPS proporciona información de ubicación geográfica y velocidad absoluta mediante posicionamiento satelital, mientras que una IMU se basa en mediciones de sensores internos para proporcionar información sobre el estado del movimiento relativo y los cambios de orientación. Las IMU pueden funcionar sin señales de posicionamiento externas, lo que las hace especialmente útiles en entornos donde las señales GPS no están disponibles o son poco fiables (por ejemplo, en interiores, túneles o bajo el agua). Normalmente, la combinación de datos de IMU y GPS resulta en un posicionamiento y una navegación más precisos y fiables.
Las salidas típicas de una IMU incluyen:
- Datos del acelerómetro de tres ejes (X, Y, Z)
- Datos del giroscopio de tres ejes (X, Y, Z)
- (Si está equipado) Datos del magnetómetro de tres ejes
- (Si está equipado) Datos de presión barométrica y altitud
Ofrecemos dos tipos principales de IMU:
- IMU MEMS : Más pequeñas, ligeras y asequibles, ideales para aplicaciones de precisión media. También ofrecemos IMU MEMS de alta precisión que proporcionan niveles de exactitud de hasta 0,1°/h , comparables a los giroscopios de fibra óptica de gama básica .
- IMU FOG: de alta precisión y estables, se utilizan en aplicaciones exigentes como la industria aeroespacial, la defensa y los sistemas de navegación de alta gama.
Sí, las IMU de GuideNav son idóneas para aplicaciones de grado militar. Centradas en la alta precisión, la durabilidad y la personalización, nuestras IMU cumplen con los exigentes requisitos de las operaciones de defensa más delicadas, incluidas las misiones de reconocimiento, vigilancia y exploración submarina.
Sí, puede reemplazar su IMU actual con nuestro producto. Nuestra IMU está diseñada para ser compatible con una amplia gama de sistemas y aplicaciones. Aquí tiene algunos puntos clave a considerar:
Compatibilidad: Nuestra IMU es compatible con protocolos de comunicación estándar (como SPI, I2C, UART) y ofrece especificaciones similares o mejoradas a las de la mayoría de las IMU existentes. Esto garantiza una integración sencilla con su sistema actual.
Rendimiento mejorado: nuestra IMU proporciona mayor precisión, niveles de ruido más bajos y mejor estabilidad, lo que puede mejorar el rendimiento general de su aplicación.
Características adicionales: Dependiendo del modelo, nuestras IMU pueden incluir sensores adicionales (como magnetómetros) y capacidades avanzadas de procesamiento de datos, ofreciendo datos de movimiento y orientación más completos.
Soporte y documentación: Brindamos documentación detallada y soporte técnico para ayudarlo en el proceso de reemplazo, garantizando una transición sin problemas y sin tiempos de inactividad significativos.
Personalización: si tiene requisitos específicos, nuestro equipo puede trabajar con usted para personalizar la configuración o el firmware de la IMU para que se adapten mejor a las necesidades de su aplicación.