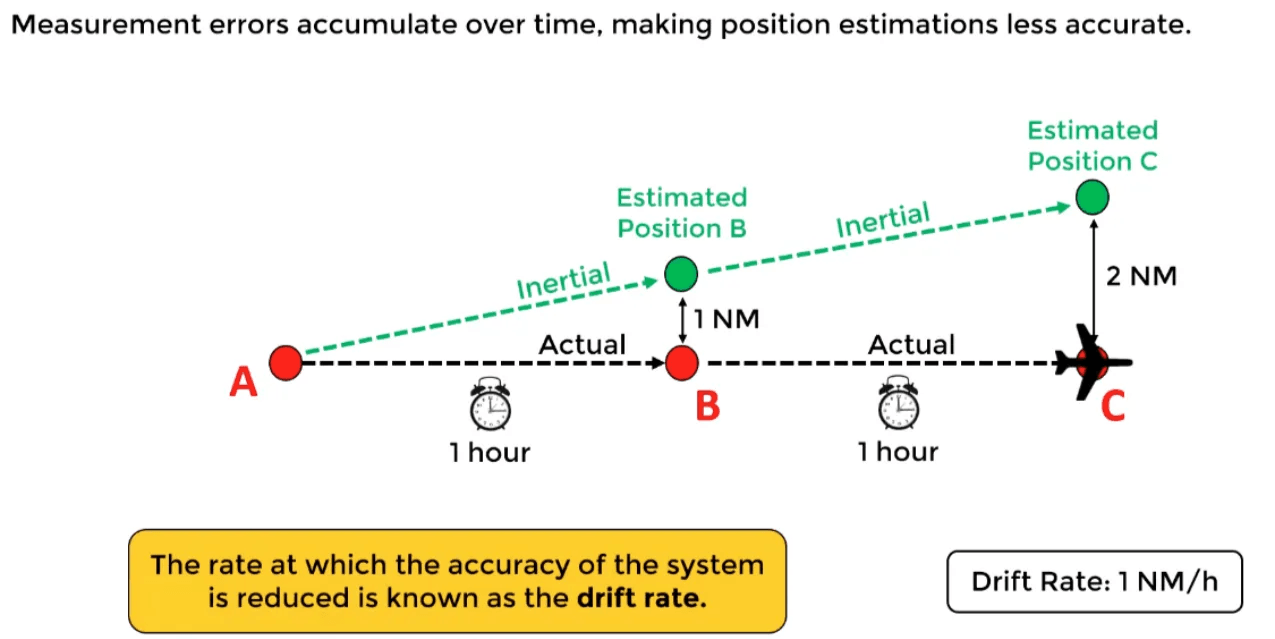
In the context of inertial navigation systems (INS), drift refers to the gradual accumulation of error over time, which causes the system’s measurements (like position, velocity, or heading) to gradually become less accurate.
Here's how it works:
- No external correction: In INS, sensors like accelerometers and gyroscopes are used to calculate things like position and direction. However, these sensors are not perfect, and their small errors can build up over time.
- Small errors add up: Even a tiny mistake in the measurement (like a tiny shift in position or a slight error in rotation) can grow larger as time goes on, causing the system to “drift” away from the true value.
Why it matters:
Drift is a common challenge in INS because it leads to increasing errors as the system continues to operate. Without corrections from external sources (like GPS), drift can cause the system to give inaccurate results after some time, affecting the overall accuracy of the navigation system.