How to Choose a FOG That Integrates, Performs, and Supports You
Selecting the wrong Fiber Optic Gyroscope (FOG) can delay projects and raise costs. Smart buyers look beyond the datasheet-choosing a FOG that integrates smoothly, performs consistently, and comes with guaranteed long-term service and delivery assurance.
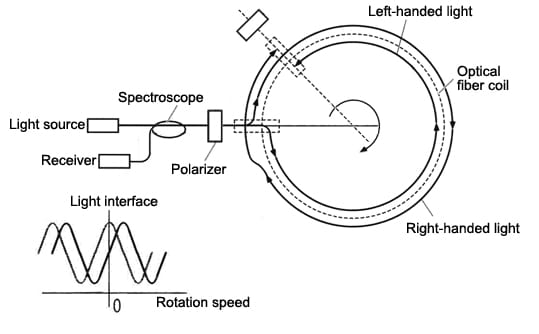
Thermal Sensitivity in Fiber Optic Gyroscopes: Design Strategies for Extreme Environments
Thermal sensitivity in fiber optic gyroscopes arises from material expansion, refractive index shifts, and optical source behavior. Advanced strategies-thermal compensation, coil winding optimization, and robust calibration-enable FOGs to sustain accuracy in extreme environments.
Designing with ARW in Mind: Practical Engineering for IMU Selection (Part 2)
Angle Random Walk (ARW) sets the ultimate limit of IMU accuracy. It cannot be removed by software, only reduced through low-noise sensor selection, stable thermal design, vibration isolation, and effective multi-sensor fusion strategies.
Understanding ARW: The Hidden Limit to IMU Accuracy (Part 1)
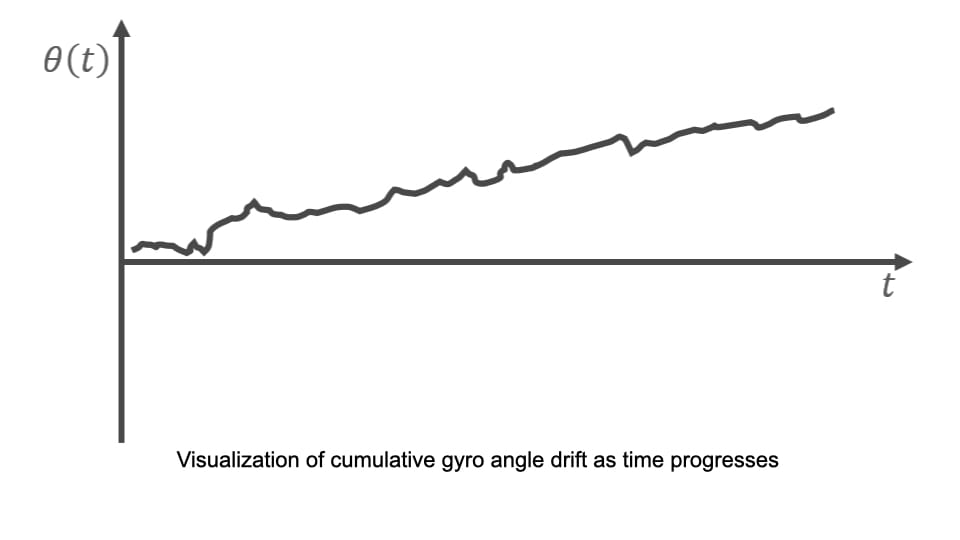
ARW isn’t a spec—it’s a clock. From the moment your IMU starts, it tells you how fast orientation trust degrades. The lower it is, the longer your system stays right.
10 Design Mistakes Engineers Make When Integrating IMUs
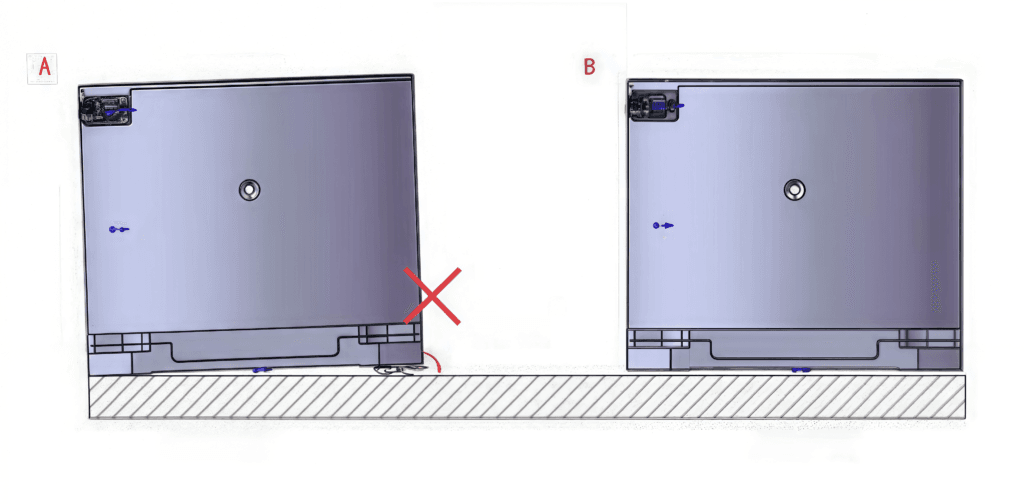
IMU integration errors can destroy navigation reliability. From misalignment and vibration to poor calibration and overreliance on sensor fusion, engineers often repeat the same mistakes. In this guide, we explore the 10 most common mistakes in IMU integration, explain their consequences, and provide expert solutions you can apply in your own projects.
FOG Technology in Spacecraft Attitude Control: Beyond the Limits of MEMS
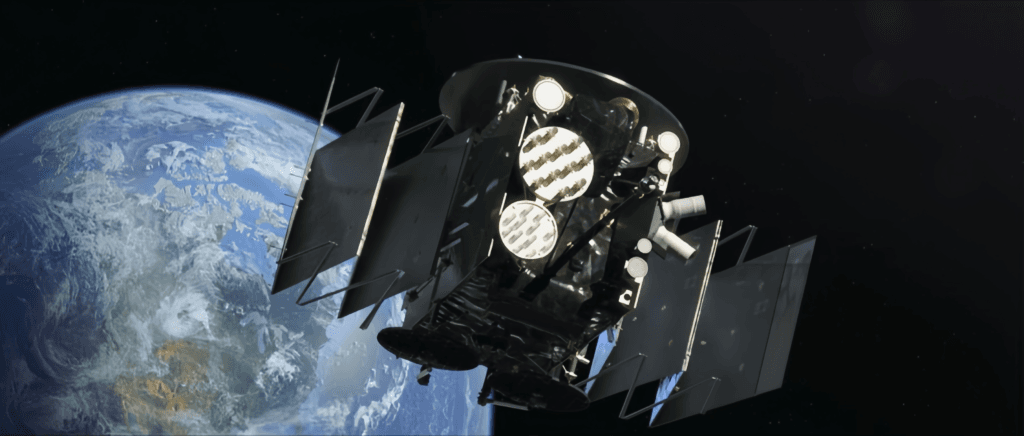
Fiber Optic Gyroscopes outperform MEMS by delivering long-term stability, radiation resistance, and precision that remains reliable for years. They are indispensable for satellites, constellations, and deep-space probes where accuracy cannot be compromised.
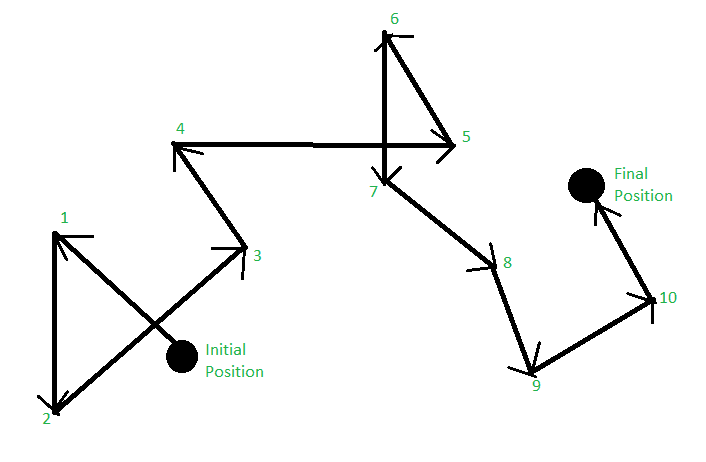
How Multi-Sensor Fusion is Redefining Inertial Navigation Systems

Inertial navigation accuracy is ultimately limited by how well sensor errors are modeled and compensated. From bias drift to random walk, effective mitigation requires a combination of hardware design, calibration routines, and real-time algorithmic correction.
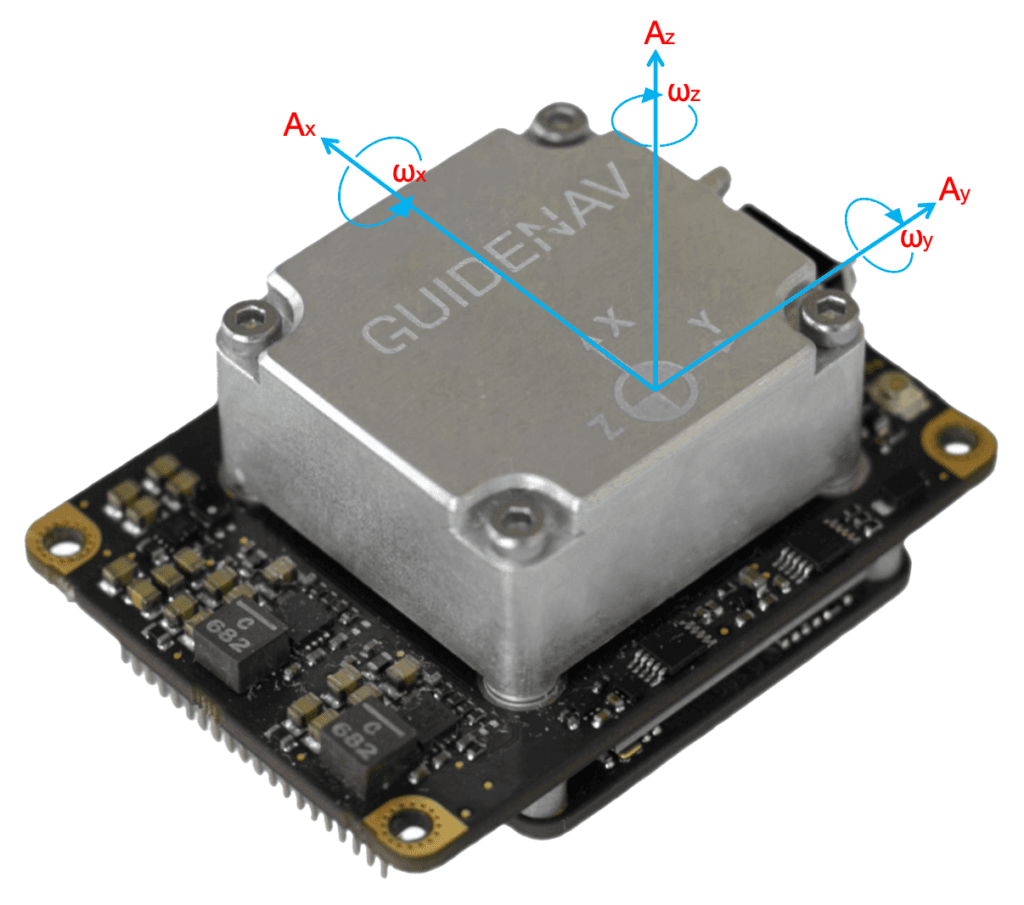
Top 10 FOG Inertial Measurement Unit (IMU) Suppliers in 2025

Discover the top 10 fiber optic IMU suppliers in 2025, including Honeywell, Exail, GuideNav, and more. Compare bias drift, export control, and tactical performance for aerospace and defense applications.
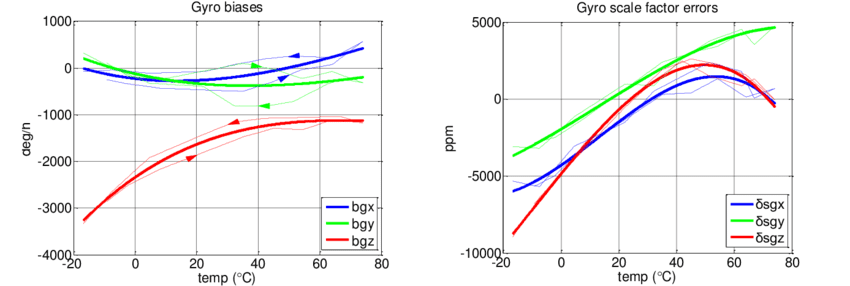
Error Sources and Compensation Techniques in Inertial Navigation Systems
Inertial navigation accuracy is ultimately limited by how well sensor errors are modeled and compensated. From bias drift to random walk, effective mitigation requires a combination of hardware design, calibration routines, and real-time algorithmic correction.
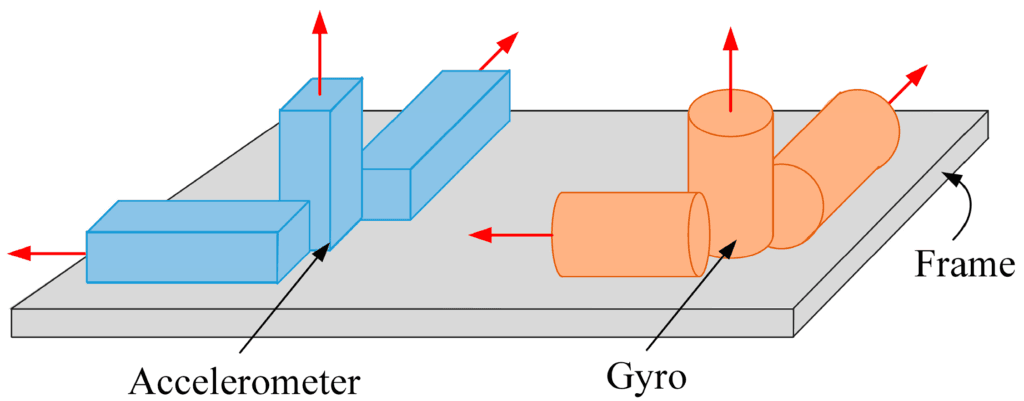
10-Axis MEMS IMUs Explained: Components, Benefits, and Use Cases
A 10-axis MEMS IMU offers a significant leap over traditional 3-axis or 6-axis sensors by combining gyroscopes, accelerometers, magnetometers, and a barometer into one compact module. This richer sensor fusion enables not only motion tracking, but also absolute heading and altitude awareness-crucial for reliable navigation, control, and stability in complex or GPS-denied environments.