Inside GuideNav’s Design: How Rugged Optic Fiber IMUs Withstand Shock and Vibration
Rugged fiber optic IMUs achieve extreme reliability by combining titanium housings, floating coil suspensions, elastomeric and wire-rope isolators, and AI-based signal compensation. These technologies let them function flawlessly under intense vibration and shock where conventional gyros fail.
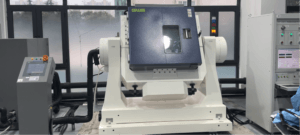
Why Are Aging Tests Essential for Fiber Optic IMU and INS?
Aging tests for Fiber Optic IMUs and INSs are not redundant costs—they are scientific methods to forecast shelf life, establish warranty periods, and ensure mission reliability under real-world stress.
How Does a Fiber Optic INS Perform Navigation Initialization Before a Mission?
A fiber optic INS initializes before takeoff by stabilizing temperature, aligning gyroscopes and accelerometers, estimating bias, and performing coarse-to-fine attitude alignment—ensuring accurate navigation from the first second of flight.

Why Do Fiber Optic IMUs Need to Be Powered On Regularly?
Powering on a fiber optic IMU regularly stabilizes its thermal environment, refreshes bias calibration, and prevents long-term degradation of electronic components—ensuring fast startup and dependable performance.

FOG North Finder vs. FOG INS: What’s the Real Difference?
A FOG north finder and a FOG INS are not the same. A north finder provides true heading using Earth’s rotation, while a FOG INS delivers full navigation data—position, velocity, and attitude—through gyroscopes, accelerometers, and navigation algorithms.
10 Common Mistakes Engineers Make When Using Fiber Optic Gyroscopes (FOGs)
FOGs often fail in the field not due to poor design, but because of usage errors—misalignment, vibration, weak calibration, or ignoring EMI. Avoiding these 10 common mistakes ensures navigation-grade performance. GuideNav provides ITAR-free FOGs with expert integration support to help buyers and engineers succeed.