Before a UAV or unmanned platform begins its mission, its inertial navigation system must align itself to the environment. Without proper initialization, even the best fiber optic INS cannot deliver reliable heading, attitude, or position. The process may take only minutes, but navigation initialization is the foundation of mission success.
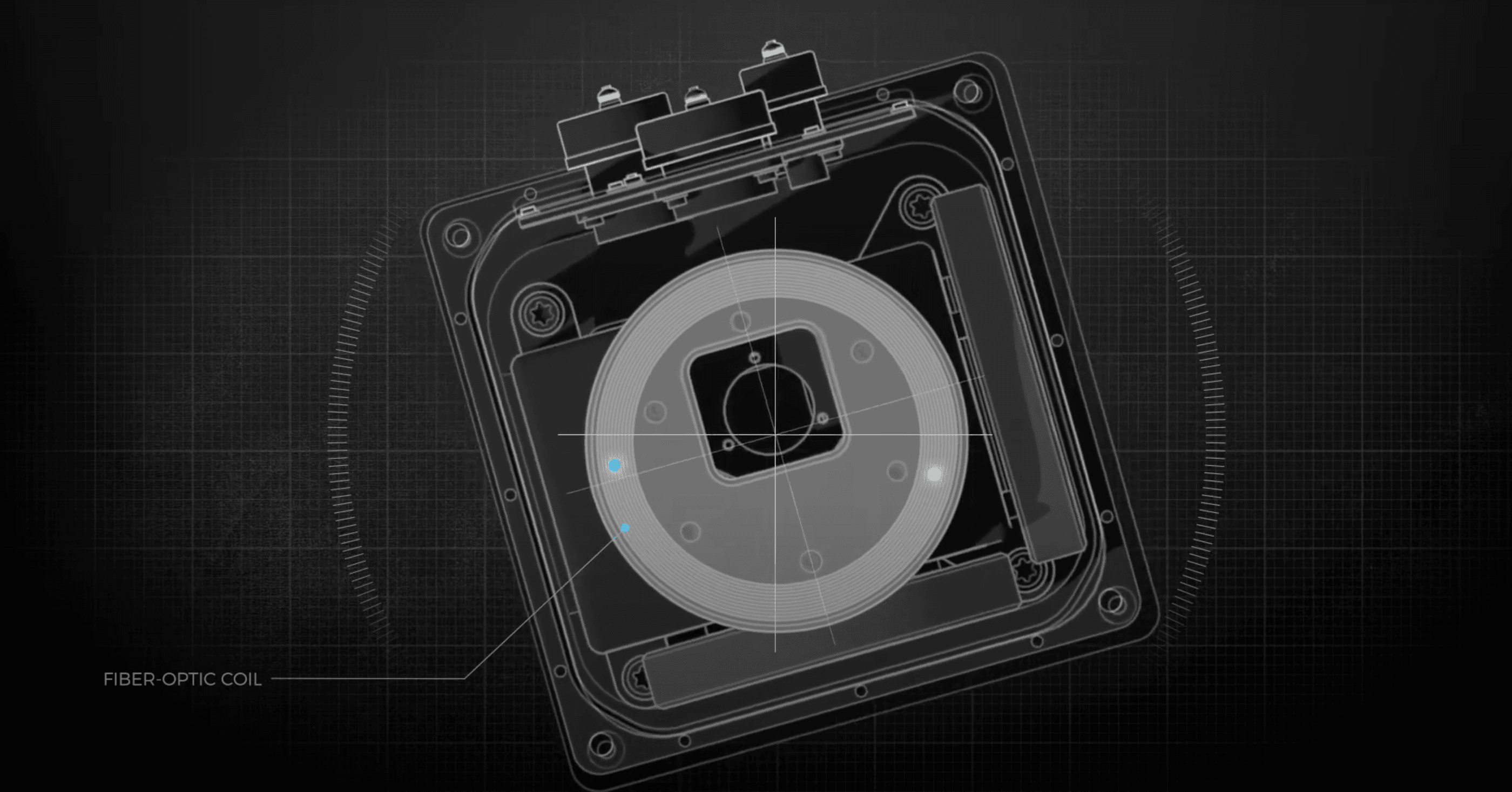
A fiber optic INS initializes before takeoff by stabilizing temperature, aligning gyroscopes and accelerometers, estimating bias, and performing coarse-to-fine attitude alignment—ensuring accurate navigation from the first second of flight.
Initialization is often underestimated, yet it determines whether navigation data starts accurate or drifts from the very beginning. For UAVs and other autonomous platforms, the procedure involves thermal conditioning, bias calibration, and attitude alignment. Each step ensures that the INS is mission-ready before engines or rotors ever start turning.
Table of contents
Why Does Temperature Stabilization Come First?
Before any alignment begins, a fiber optic INS must first reach thermal balance. This stage is critical because temperature fluctuations directly affect sensor bias and scale factor. Skipping it will almost guarantee poor initialization.
- Gyroscopes and accelerometers are highly temperature-sensitive→ even small shifts can distort readings.
- Warm-up is required→ the system needs time to stabilize before reliable data can be produced.
- Without stabilization, bias drift can increase tenfold→ leading to degraded alignment quality.
- Best practice: power on 10–20 minutes before departure→ ensuring the INS starts from a stable baseline.
How Are Biases Estimated During Initialization?
Once the INS is powered on and kept still, it measures outputs from its gyroscopes and accelerometers over time. These readings are used to estimate the static bias, which represents the sensor’s inherent error when no motion is present. Even micro-level biases, if left uncorrected, can accumulate into large navigation errors. By averaging and modeling signals during this phase, the INS starts fine alignment with clean, reliable data.
What Happens During Coarse Alignment?
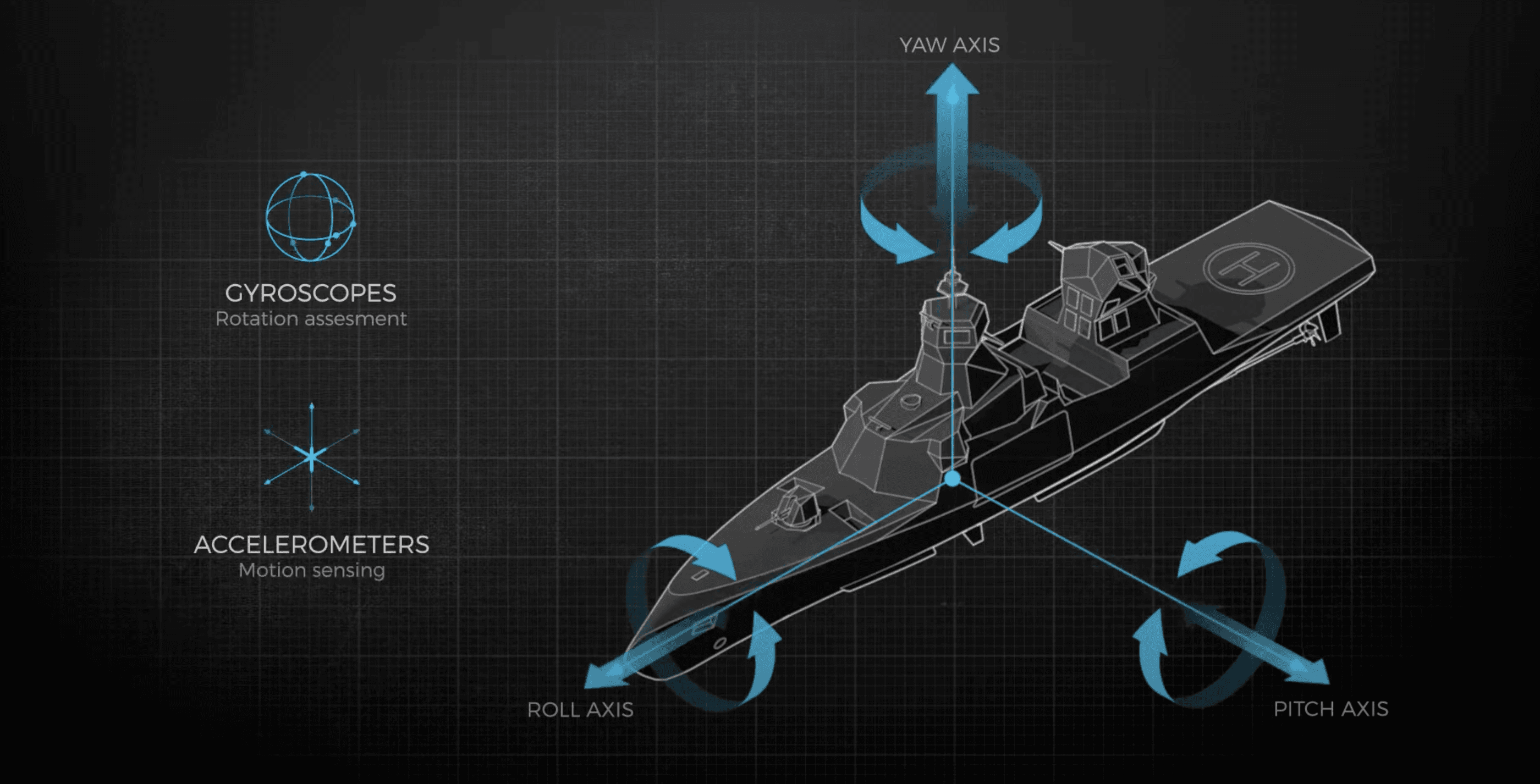
After thermal stabilization and bias estimation, the fiber optic INS begins the coarse alignment phase. At this stage, the system does not yet aim for full precision but instead focuses on building a reliable first estimate of its orientation. By relying on natural references—gravity and Earth’s rotation—the INS can establish a baseline for pitch, roll, and heading. This process is fundamental because without a solid coarse alignment, fine alignment cannot converge correctly.
- Gravity from accelerometers → provides pitch and roll.
- Earth rotation from gyroscopes → provides heading.
- The process takes several minutes → delivering an approximate attitude baseline.
- This baseline is then refined later → forming the foundation for fine alignment.
How Is Fine Alignment Achieved?
Once coarse alignment provides a starting point, the system moves into fine alignment, where precision is gradually improved. In this phase, the fiber optic INS applies advanced filtering—often a Kalman filter—to combine sensor outputs and reduce residual errors. Fine alignment continuously refines heading, pitch, and roll, shrinking small deviations that remain after coarse alignment. With each cycle, the INS converges closer to navigation-grade accuracy, ensuring that when the UAV finally begins its mission, its orientation is stable and dependable.
Why Must the INS Remain Stationary?
During initialization, the INS must separate natural reference signals—gravity and Earth’s rotation—from any actual platform motion. If the UAV moves during this process, the sensor readings become contaminated, leading to inaccurate bias estimation and incorrect alignment. Keeping the system perfectly still is therefore critical to ensure reliable initialization.
Key points to remember:
- Movement introduces false signalsthat the system may misinterpret as part of alignment.
- Stationary conditions allow true bias estimation, producing a cleaner model for drift correction.
- Any vibration or motion can delay or corrupt initialization, forcing longer convergence times.
How Do GNSS Aids Improve Initialization?
GNSS can dramatically accelerate the alignment process by providing absolute position and velocity information. When paired with a fiber optic INS, this external data reduces the time required to achieve full navigation accuracy.
| With GNSS Aiding | Without GNSS Aiding |
|---|---|
| Alignment converges much faster, often in a few minutes. | Alignment relies only on inertial sensors, taking longer to stabilize. |
| Heading accuracy improves quickly, especially during fine alignment. | Heading errors may remain larger until sufficient time passes. |
| Ideal for rapid deployment UAV missions. | Suitable for GNSS-denied operations but requires patience. |
What Are the Risks of Poor Initialization?
When initialization is not carried out correctly, errors creep into the navigation solution from the very beginning. These issues may remain hidden at first, but they can severely affect mission performance once the UAV is airborne.
- Heading errors→ lead to incorrect navigation paths and cumulative drift.
- Route deviations→ UAVs may stray from planned flight lines, requiring frequent corrections.
- Dependence on GNSS→ weakens reliability in GNSS-denied environments.
- Extended convergence times→ waste operational time and energy.
- Reduced confidence→ operators cannot fully trust the navigation solution.
The Final Step Before Flight
Think of pre-flight initialization as the quiet countdown before a rocket launch. Nothing dramatic happens on the outside, yet every sensor, every algorithm, and every circuit inside the fiber optic INS is settling into place. Skip the countdown, and the launch risks failure; respect it, and the mission begins with confidence.
For UAV operators, this means never rushing through warm-up, bias estimation, or alignment. Each step is invisible to the eye but critical for accuracy in the air. The payoff is simple: fewer surprises, faster convergence, and a navigation system you can trust when GNSS is unavailable.
At GuideNav, we design our fiber optic INS units to support this discipline with rapid warm-up, robust self-tests, and reliable alignment algorithms. Follow the right steps, pair them with the right technology, and your UAV will always take off ready for the challenges ahead.
