Los 10 principales proveedores de unidades de medición inercial (IMU) FOG en 2025

Descubra los 10 principales proveedores de IMU de fibra óptica en 2025, incluyendo Honeywell, Exail, GuideNav y más. Compare la deriva de polarización, el control de exportación y el rendimiento táctico para aplicaciones aeroespaciales y de defensa.
Fuentes de error y técnicas de compensación en sistemas de navegación inercial
La precisión de la navegación inercial se ve limitada, en última instancia, por la precisión con la que se modelan y compensan los errores del sensor. Desde la deriva de sesgo hasta el desplazamiento aleatorio, una mitigación eficaz requiere una combinación de diseño de hardware, rutinas de calibración y corrección algorítmica en tiempo real.
IMU MEMS de 10 ejes: componentes, beneficios y casos de uso
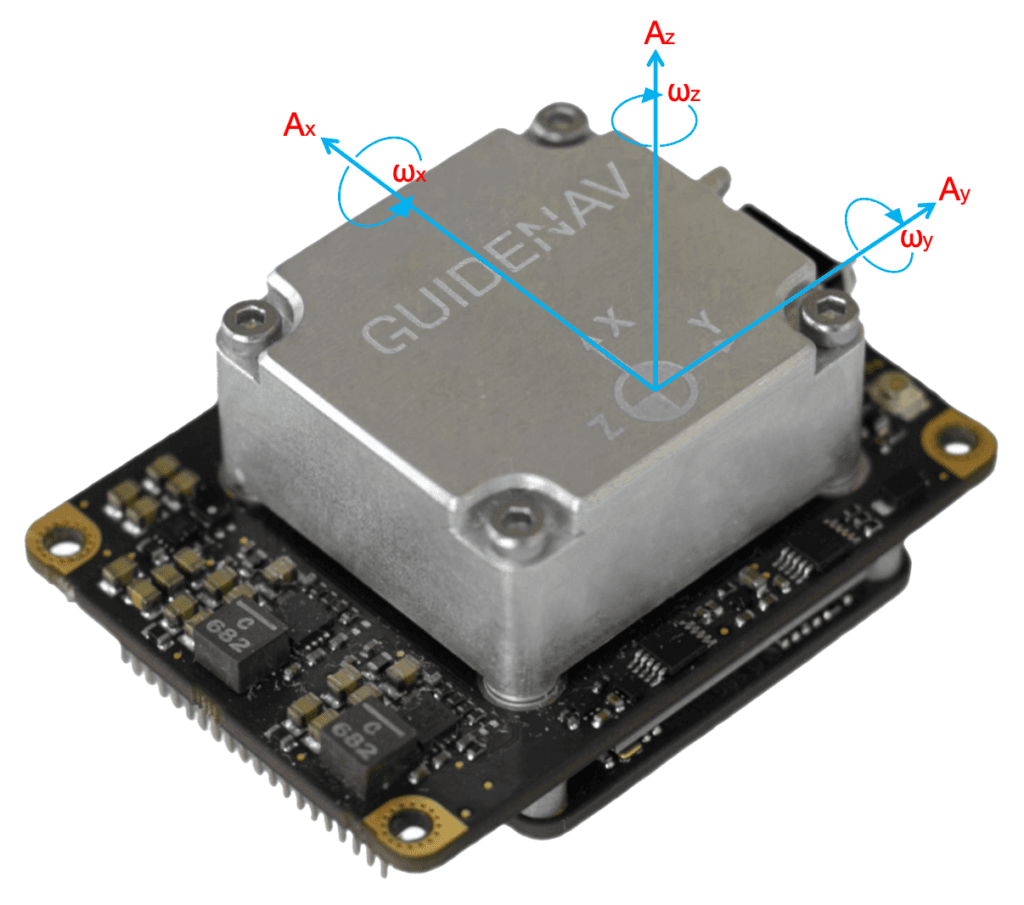
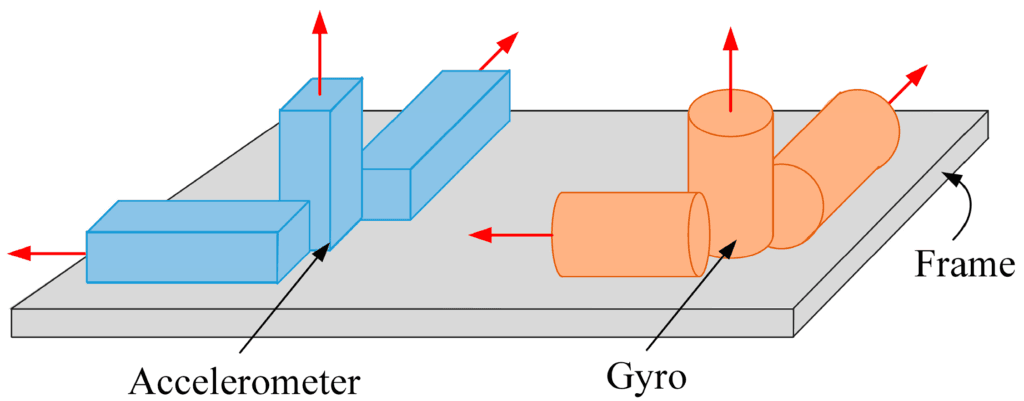
Una IMU MEMS de 10 ejes supone un avance significativo respecto a los sensores tradicionales de 3 o 6 ejes al combinar giroscopios, acelerómetros, magnetómetros y un barómetro en un módulo compacto. Esta fusión de sensores más completa permite no solo el seguimiento del movimiento, sino también el conocimiento absoluto del rumbo y la altitud, cruciales para una navegación, un control y una estabilidad fiables en entornos complejos o sin GPS.
¿Cómo seleccionar el acelerómetro MEMS adecuado?
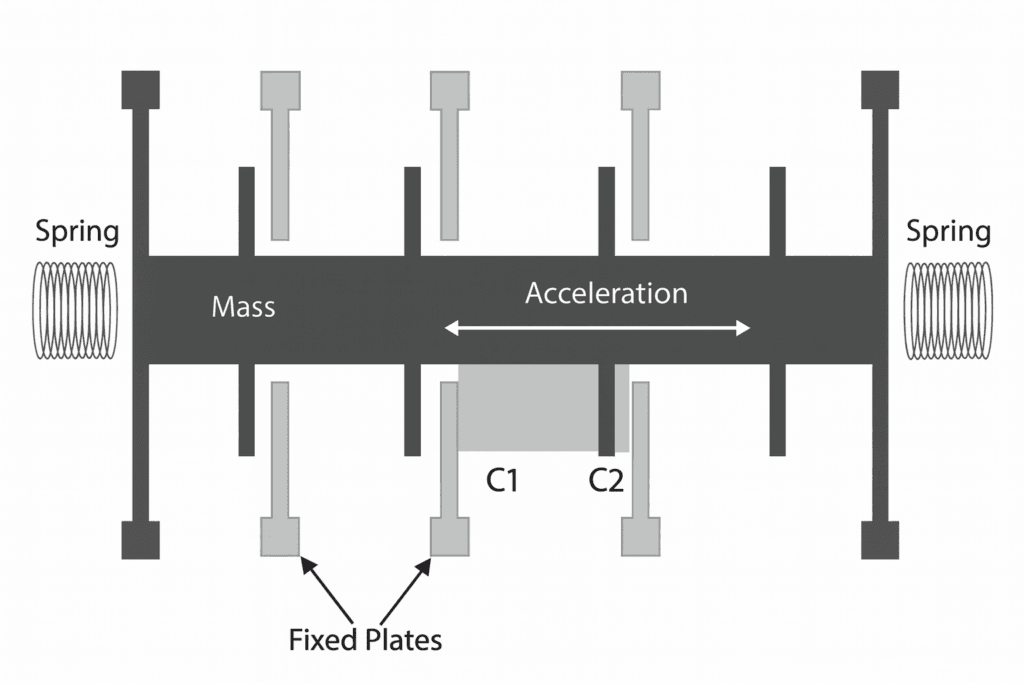
Seleccionar un acelerómetro MEMS no se limita a las cifras de la hoja de datos. Factores del mundo real como la deriva térmica, la resistencia a la vibración y la estabilidad de la polarización en campo suelen determinar el rendimiento del sistema donde realmente importa. Esta guía se centra en lo que realmente importa en las plataformas de defensa, aeroespacial y robótica.
Las 6 principales tendencias tecnológicas IMU que definirán la navegación táctica en 2025
Explore seis tendencias clave de IMU (avances en MEMS, precisión de FOG, calibración de IA, matrices de IMU, optimización de SWaP y navegación sin GPS) que redefinen los sistemas de guía táctica en 2025.
Análisis del EMCORE DSP-3000 FOG: fortalezas, casos de uso y comparación
Compare los giroscopios de fibra óptica EMCORE DSP-3000 y GuideNav GSF30. Descubra cómo el GSF30 ofrece un rendimiento de nivel táctico en un diseño compacto y de bajo consumo, ideal para UAV, estabilizadores y plataformas integradas.
Cómo los giroscopios MEMS impulsan la robótica moderna: desde vehículos guiados automáticos (AGV) de almacén hasta brazos humanoides

Los giroscopios MEMS constituyen el núcleo inercial de la robótica avanzada, ofreciendo detección precisa de velocidad angular, seguimiento de la orientación en tiempo real y retroalimentación de movimiento fiable en paquetes compactos y de bajo consumo. Son indispensables para permitir una navegación estable y un movimiento ágil tanto para AGV como para brazos robóticos humanoides.
¿MEMS o FOG para la estabilización de LRF en plataformas blindadas? Esto es lo que necesita saber

Según la experiencia práctica, los giroscopios FOG superan a los MEMS en términos de estabilidad a largo plazo, inmunidad a las vibraciones y robustez térmica en aplicaciones LRF montadas en vehículos. Los MEMS siguen siendo viables para plataformas con limitaciones de espacio o presupuestos ajustados, pero requieren un diseño de compensación cuidadoso.
Ciclo de vida del giroscopio FOG: durabilidad, calibración y mantenimiento
En implementaciones prácticas, mantener la precisión y estabilidad de un giroscopio de fibra óptica (FOG) requiere más que un diseño de sensor avanzado: exige un marco de sistema calibrado que incluya compensación térmica, aislamiento mecánico y mantenimiento consciente del ciclo de vida.
¿Por qué las IMU de giroscopio de fibra óptica (FOG) son revolucionarias para las aplicaciones de cardán?

Por eso confío en las IMU de giroscopio de fibra óptica: brindan precisión y resistencia inigualables y transforman estabilizadores inestables y poco confiables en plataformas estables sin importar las condiciones.