
Los 10 principales proveedores de unidades de medición inercial (IMU) FOG en 2025
Descubra los 10 principales proveedores de IMU de fibra óptica en 2025, incluyendo Honeywell, Exail, GuideNav y más. Compare la deriva de polarización, el control de exportación y el rendimiento táctico para aplicaciones aeroespaciales y de defensa.
Fuentes de error y técnicas de compensación en sistemas de navegación inercial
La precisión de la navegación inercial se ve limitada, en última instancia, por la precisión con la que se modelan y compensan los errores del sensor. Desde la deriva de sesgo hasta el desplazamiento aleatorio, una mitigación eficaz requiere una combinación de diseño de hardware, rutinas de calibración y corrección algorítmica en tiempo real.
IMU MEMS de 10 ejes: componentes, beneficios y casos de uso
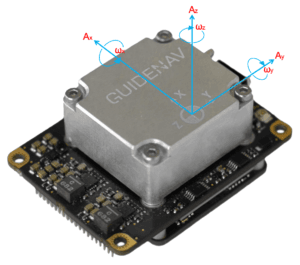
Una IMU MEMS de 10 ejes supone un avance significativo respecto a los sensores tradicionales de 3 o 6 ejes al combinar giroscopios, acelerómetros, magnetómetros y un barómetro en un módulo compacto. Esta fusión de sensores más completa permite no solo el seguimiento del movimiento, sino también el conocimiento absoluto del rumbo y la altitud, cruciales para una navegación, un control y una estabilidad fiables en entornos complejos o sin GPS.
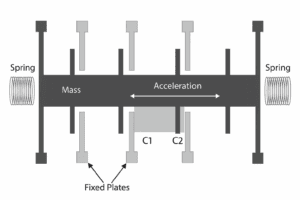
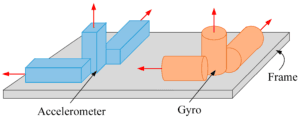
¿Cómo seleccionar el acelerómetro MEMS adecuado?
Seleccionar un acelerómetro MEMS no se limita a las cifras de la hoja de datos. Factores del mundo real como la deriva térmica, la resistencia a la vibración y la estabilidad de la polarización en campo suelen determinar el rendimiento del sistema donde realmente importa. Esta guía se centra en lo que realmente importa en las plataformas de defensa, aeroespacial y robótica.
Las 6 principales tendencias tecnológicas IMU que definirán la navegación táctica en 2025
Explore seis tendencias clave de IMU (avances en MEMS, precisión de FOG, calibración de IA, matrices de IMU, optimización de SWaP y navegación sin GPS) que redefinen los sistemas de guía táctica en 2025.
Análisis del EMCORE DSP-3000 FOG: fortalezas, casos de uso y comparación
Compare los giroscopios de fibra óptica EMCORE DSP-3000 y GuideNav GSF30. Descubra cómo el GSF30 ofrece un rendimiento de nivel táctico en un diseño compacto y de bajo consumo, ideal para UAV, estabilizadores y plataformas integradas.