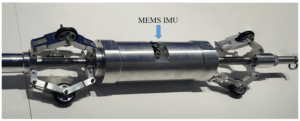
Aplicación de IMU MEMS en robots de inspección de tuberías
Las IMU MEMS ofrecen navegación inercial precisa para robots de inspección de tuberías que operan en entornos sin GNSS. Al proporcionar datos estables de actitud, velocidad y posición, garantizan un mapeo fiable de defectos, un control uniforme de la trayectoria y un funcionamiento continuo en tuberías subterráneas o submarinas confinadas.

Las trampas ocultas en el uso de IMU MEMS de alta precisión: lo que todo integrador debe saber
Las IMU MEMS de alta precisión ofrecen un rendimiento de detección de movimiento inigualable, pero solo si se usan correctamente. Esto revela cuatro errores críticos de uso que suelen causar pérdida de precisión y cómo prevenirlos en la integración en el mundo real.
Ventajas y desventajas de la IMU MEMS HG1930 de Honeywell
El Honeywell HG1930 es una IMU MEMS compacta y de grado táctico que ofrece un rendimiento fiable y un diseño robusto para vehículos aéreos no tripulados (UAV), robótica y sistemas de defensa. Ofrece una precisión estable en entornos hostiles, pero presenta un coste elevado y limitaciones para su exportación.

Dentro de la tecnología de localización basada en INS detrás de la conducción autónoma
Los vehículos autónomos logran una precisión centimétrica a través de la integración GNSS/INS, el mapeo LiDAR y la percepción visual, con IMU de alta precisión que forman el núcleo de la localización cuando fallan las señales GPS.

¿Puede una IMU por sí sola realizar la odometría?
En teoría, una IMU puede calcular la odometría mediante doble integración, pero el sesgo y el ruido la hacen desviarse exponencialmente con el tiempo. Por lo tanto, los sistemas de navegación reales dependen de la fusión de la IMU con GNSS, LiDAR o cámaras para mantener la precisión y la estabilidad.
¿Cuándo se debe recalibrar o reemplazar una IMU FOG?
Recalibre su IMU FOG cada 12 a 24 meses para mantener la estabilidad de la polarización. Reemplácela después de 5 a 8 años o cuando la desviación supere las especificaciones para garantizar la fiabilidad de la navegación a largo plazo.