
Wie MEMS-Gyroskope die moderne Robotik antreiben: Von fahrerlosen Transportsystemen in Lagerhallen bis hin zu humanoiden Armen
MEMS-Gyroskope bilden das inertiale Herzstück moderner Robotik – sie liefern präzise Winkelgeschwindigkeitsmessungen, Echtzeit-Orientierungsverfolgung und zuverlässiges Bewegungsfeedback in kompakten, energieeffizienten Gehäusen. Sie sind unverzichtbar für die stabile Navigation und die geschickte Bewegung von fahrerlosen Transportsystemen (AGVs) und humanoiden Roboterarmen.

MEMS oder FOG zur LRF-Stabilisierung in gepanzerten Plattformen? Hier erfahren Sie, was Sie wissen müssen
Basierend auf praktischen Erfahrungen sind FOG-Gyroskope MEMS hinsichtlich Langzeitstabilität, Vibrationsunempfindlichkeit und thermischer Robustheit in fahrzeugmontierten LRF-Anwendungen überlegen. MEMS sind weiterhin für platzsparende oder budgetkritische Plattformen geeignet, erfordern jedoch eine sorgfältige Kompensationsauslegung.

Lebenszyklus des FOG-Gyroskops: Haltbarkeit, Kalibrierung und Wartung
Für den praktischen Einsatz ist zur Aufrechterhaltung der Präzision und Stabilität eines faseroptischen Gyroskops (FOG) mehr erforderlich als ein fortschrittliches Sensordesign – es bedarf eines kalibrierten Systemrahmens, der thermische Kompensation, mechanische Isolation und eine auf den Lebenszyklus ausgerichtete Wartung umfasst.
Warum faseroptische Gyroskop-IMUs (FOG-IMUs) bahnbrechend für Gimbal-Anwendungen sind?
Deshalb setze ich auf faseroptische Gyroskop-IMUs – sie bieten unübertroffene Präzision und Robustheit und verwandeln wackelige, unzuverlässige Kardanaufhängungen in absolut stabile Plattformen, egal unter welchen Bedingungen.
Wie können INS-Lösungen Navigationsherausforderungen in komplexen Umgebungen bewältigen?
Inertialnavigationssysteme (INS) arbeiten unabhängig von externen Signalen, indem sie Beschleunigung und Winkelgeschwindigkeit mithilfe interner Sensoren messen. Dadurch sind sie unverzichtbar in Umgebungen, in denen GNSS-Signale blockiert oder unzuverlässig sind. Durch ausgefeilte Sensorfusion, Fehlerkompensation und KI-gestützte Korrekturen liefern INS auch in anspruchsvollsten Szenarien eine kontinuierliche und präzise Positionsbestimmung.
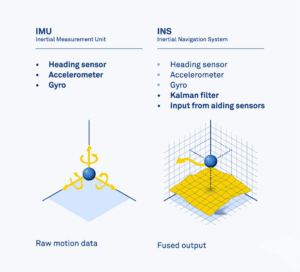
Worin besteht der Unterschied zwischen einer IMU und einem INS?
Eine IMU misst die Bewegung, während ein INS die IMU-Daten nutzt, um Position und Orientierung im Zeitverlauf zu berechnen – die IMU ist ein Sensor, das INS ein System.