
Die 10 besten FOG-IMU-Lieferanten (Inertial Measurement Unit) im Jahr 2025
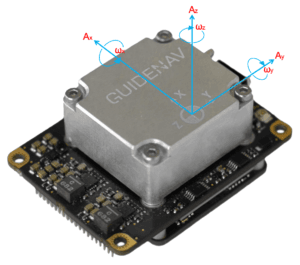
Entdecken Sie die Top 10 der Anbieter von Glasfaser-IMUs im Jahr 2025, darunter Honeywell, Exail, GuideNav und weitere. Vergleichen Sie Bias-Drift, Exportkontrolle und taktische Leistung für Anwendungen in der Luft- und Raumfahrt sowie der Verteidigungsindustrie.
Fehlerquellen und Kompensationstechniken in Trägheitsnavigationssystemen
Die Genauigkeit der Trägheitsnavigation ist letztendlich durch die Qualität der Modellierung und Kompensation von Sensorfehlern begrenzt. Von systematischer Abweichung bis hin zu zufälligen Bewegungen erfordert eine effektive Fehlerkorrektur eine Kombination aus Hardware-Design, Kalibrierungsroutinen und algorithmischer Echtzeitkorrektur.
10-Achsen-MEMS-IMUs erklärt: Komponenten, Vorteile und Anwendungsfälle
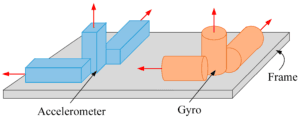
Ein 10-Achsen-MEMS-IMU bietet einen bedeutenden Fortschritt gegenüber herkömmlichen 3- oder 6-Achsen-Sensoren, indem es Gyroskope, Beschleunigungsmesser, Magnetometer und ein Barometer in einem kompakten Modul vereint. Diese umfassendere Sensorfusion ermöglicht nicht nur die Bewegungserfassung, sondern auch die Bestimmung von absoluter Richtung und Höhe – entscheidend für zuverlässige Navigation, Steuerung und Stabilität in komplexen Umgebungen oder Umgebungen ohne GPS-Empfang.
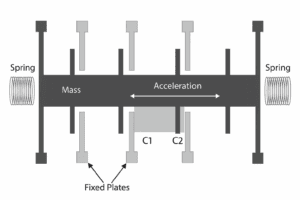
Wie wählt man den richtigen MEMS-Beschleunigungsmesser aus?
Bei der Auswahl eines MEMS-Beschleunigungssensors geht es nicht nur um die Datenblattwerte. Faktoren wie thermische Drift, Vibrationsfestigkeit und Feldstabilität bestimmen oft die Systemleistung in kritischen Bereichen. Dieser Leitfaden konzentriert sich auf die wirklich wichtigen Aspekte für Verteidigungs-, Luft- und Raumfahrt- sowie Roboterplattformen.
Die 6 wichtigsten IMU-Technologietrends, die die taktische Navigation im Jahr 2025 prägen
Entdecken Sie 6 wichtige IMU-Trends – MEMS-Durchbrüche, FOG-Präzision, KI-Kalibrierung, IMU-Arrays, SWaP-Optimierung und GPS-unabhängige Navigation – die taktische Leitsysteme im Jahr 2025 neu definieren werden.
Analyse des EMCORE DSP-3000 FOG: Stärken, Anwendungsfälle und Vergleich
Vergleichen Sie die faseroptischen Gyroskope EMCORE DSP-3000 und GuideNav GSF30. Entdecken Sie, wie das GSF30 taktische Leistung in einem kompakten, energiesparenden Design bietet – ideal für UAVs, Gimbals und eingebettete Systeme.