Quand faut-il recalibrer ou remplacer un IMU FOG ?
Réétalonnez votre IMU FOG tous les 12 à 24 mois pour maintenir la stabilité du biais. Remplacez-la tous les 5 à 8 ans ou lorsque la dérive dépasse les spécifications pour garantir la fiabilité de la navigation à long terme.
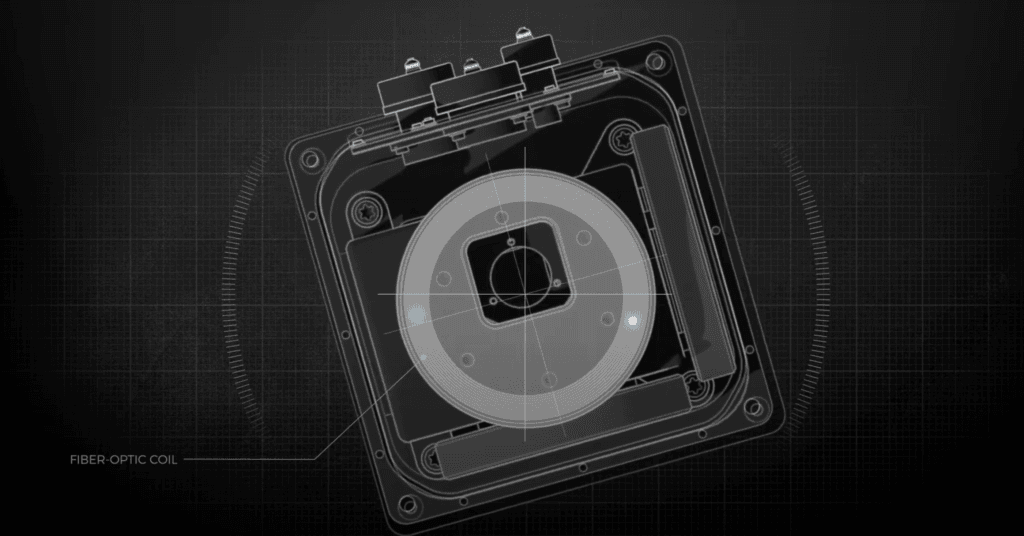
Conception de GuideNav : comment les IMU à fibre optique robustes résistent aux chocs et aux vibrations

Les IMU à fibre optique robustes offrent une fiabilité extrême grâce à l'association de boîtiers en titane, de suspensions à bobine flottante, d'isolateurs en élastomère et à câble métallique, ainsi que d'une compensation du signal basée sur l'IA. Ces technologies leur permettent de fonctionner parfaitement sous des vibrations et des chocs intenses, là où les gyroscopes conventionnels échouent.
Pourquoi les tests de vieillissement sont-ils essentiels pour les IMU et INS à fibre optique ?
Les tests de vieillissement des IMU et des INS à fibre optique ne sont pas des coûts redondants : ce sont des méthodes scientifiques permettant de prévoir la durée de vie, d'établir des périodes de garantie et de garantir la fiabilité des missions sous des contraintes réelles.
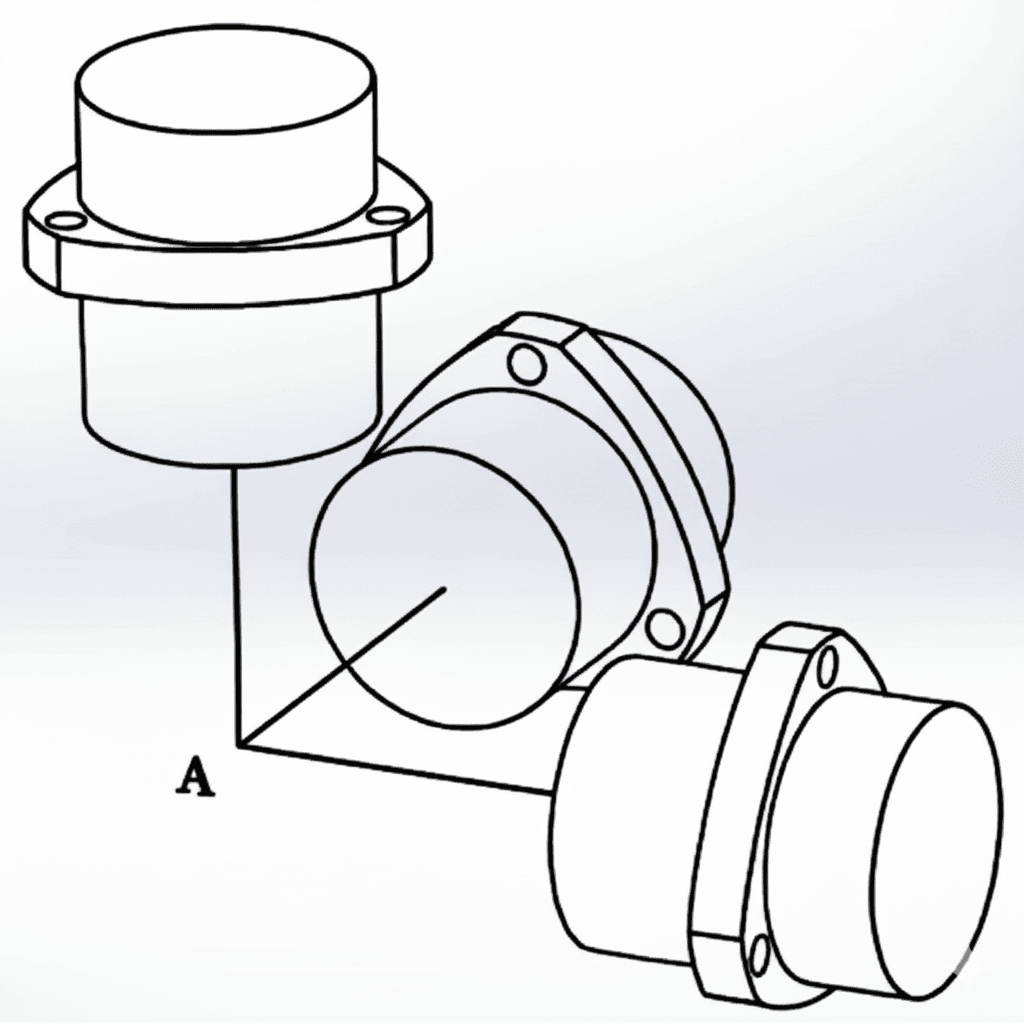
Comment un INS à fibre optique effectue-t-il l'initialisation de la navigation avant une mission ?
Un INS à fibre optique s'initialise avant le décollage en stabilisant la température, en alignant les gyroscopes et les accéléromètres, en estimant le biais et en effectuant un alignement d'attitude grossier à fin, garantissant ainsi une navigation précise dès la première seconde de vol.
Pourquoi les IMU à fibre optique doivent-ils être alimentés régulièrement ?

La mise sous tension régulière d'une IMU à fibre optique stabilise son environnement thermique, actualise l'étalonnage de polarisation et empêche la dégradation à long terme des composants électroniques, garantissant ainsi un démarrage rapide et des performances fiables.
FOG North Finder vs. FOG INS : quelle est la vraie différence ?
Un chercheur de nord FOG et un FOG INS sont différents. Un chercheur de nord fournit le cap vrai en utilisant la rotation de la Terre, tandis qu'un FOG INS fournit des données de navigation complètes (position, vitesse et attitude) grâce à des gyroscopes, des accéléromètres et des algorithmes de navigation.
10 erreurs courantes commises par les ingénieurs lors de l'utilisation de gyroscopes à fibre optique (FOG)
Les FOG tombent souvent en panne sur le terrain, non pas à cause d'une mauvaise conception, mais à cause d'erreurs d'utilisation : mauvais alignement, vibrations, mauvais étalonnage ou non-respect des interférences électromagnétiques. Éviter ces 10 erreurs courantes garantit des performances de navigation optimales. GuideNav propose des FOG exempts de réglementation ITAR avec une assistance d'intégration experte pour aider les acheteurs et les ingénieurs à réussir.
FOG en boucle ouverte ou fermée ? Comprendre la différence
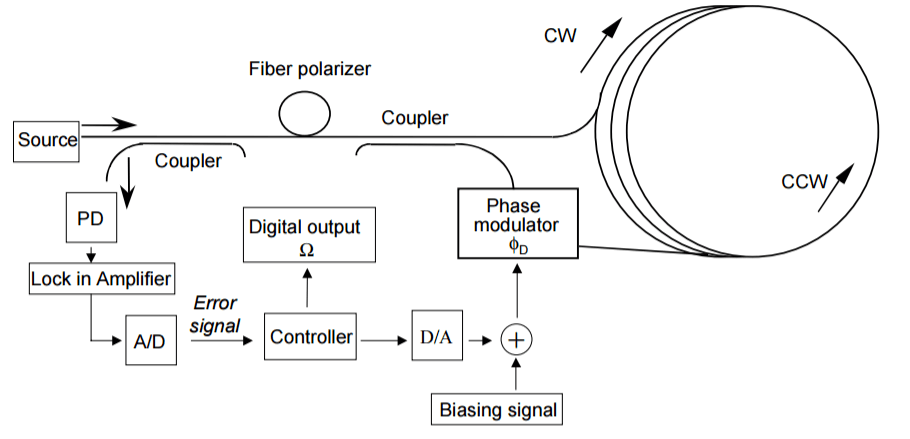
Les FOG en boucle ouverte sont compacts et économiques, avec une précision moyenne (1 à 10 °/h) pour les drones et les robots. Les FOG en boucle fermée offrent une précision ultra-élevée (0,001 à 0,1 °/h), ce qui les rend indispensables pour les sous-marins, les missiles et les systèmes aérospatiaux.
Top 10 des fournisseurs de composants électroniques MEMS en 2025

Les 10 principaux fournisseurs de MEMS INS en 2025 comprennent Honeywell, Analog Devices, GuideNav, Safran, TDK InvenSense, STMicroelectronics, Sensonor, Silicon Sensing Systems, Aceinna et SBG Systems.
FOG vs MEMS en navigation sous-marine : lequel est le plus performant ? (Partie 2)
Les gyroscopes FOG maintiennent une dérive ultra-faible et une stabilité à long terme dans des conditions sous-marines sans GNSS, tandis que les IMU MEMS offrent des alternatives compactes et à faible consommation mieux adaptées aux inspections de courte durée et aux plates-formes sensibles aux coûts.