FOG vs MEMS en navigation sous-marine : lequel est le plus performant ? (Partie II)
Les gyroscopes FOG maintiennent une dérive ultra-faible et une stabilité à long terme dans des conditions sous-marines sans GNSS, tandis que les IMU MEMS offrent des alternatives compactes et à faible consommation d'énergie mieux adaptées aux inspections de courte durée et aux plateformes sensibles aux coûts.
FOG vs MEMS en navigation sous-marine : lequel est le plus performant ? (Partie I)
Les gyroscopes FOG maintiennent une dérive ultra-faible et une stabilité à long terme dans des conditions sous-marines sans GNSS, tandis que les IMU MEMS offrent des alternatives compactes et à faible consommation d'énergie mieux adaptées aux inspections de courte durée et aux plateformes sensibles aux coûts.
FOG vs RLG : Évaluation de la précision, de la fiabilité et des coûts du cycle de vie
Les technologies FOG et RLG sont toutes deux des technologies gyroscopiques éprouvées pour la navigation de défense. Cependant, du point de vue des achats, la technologie FOG offre le meilleur compromis entre performance, fiabilité et coût du cycle de vie pour la quasi-totalité des missions, à l'exception de la dissuasion stratégique.
Comment choisir un FOG qui s'intègre, performe et vous accompagne
Choisir un gyroscope à fibre optique (FOG) inadapté peut retarder les projets et en augmenter les coûts. Les acheteurs avisés ne se contentent pas de regarder la fiche technique ; ils optent pour un FOG qui s’intègre facilement, offre des performances constantes et bénéficie d’une garantie de service et de livraison à long terme.
Sensibilité thermique des gyroscopes à fibre optique : stratégies de conception pour les environnements extrêmes
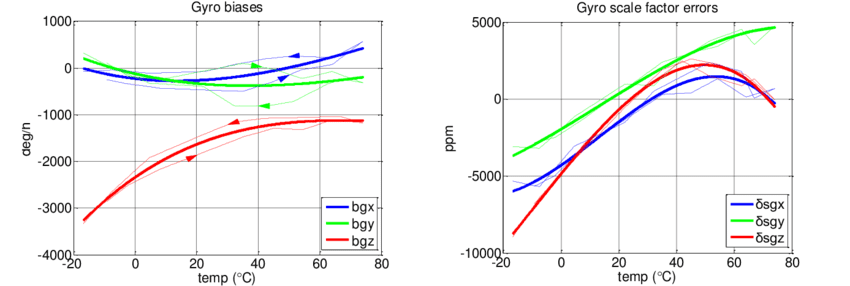
La sensibilité thermique des gyroscopes à fibre optique est due à la dilatation du matériau, aux variations de l'indice de réfraction et au comportement de la source optique. Des stratégies avancées – compensation thermique, optimisation du bobinage et étalonnage rigoureux – permettent aux gyroscopes à fibre optique de maintenir leur précision même dans des environnements extrêmes.
Conception prenant en compte l'ARW : Ingénierie pratique pour la sélection de l'IMU (Partie 2)
L'effet de marche aléatoire angulaire (ARW) constitue la limite ultime de la précision des centrales inertielles. Il ne peut être éliminé par logiciel, mais seulement réduit grâce à la sélection de capteurs à faible bruit, une conception thermique stable, l'isolation des vibrations et des stratégies de fusion multisensorielle efficaces.
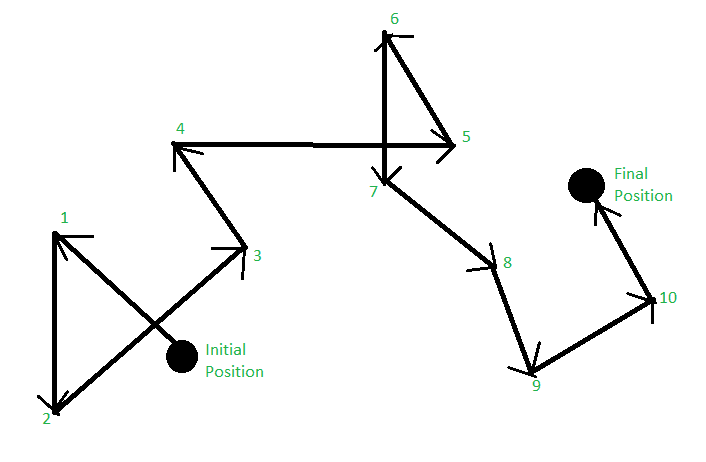
Comprendre l'ARW : la limite cachée de la précision de l'IMU (Partie 1)
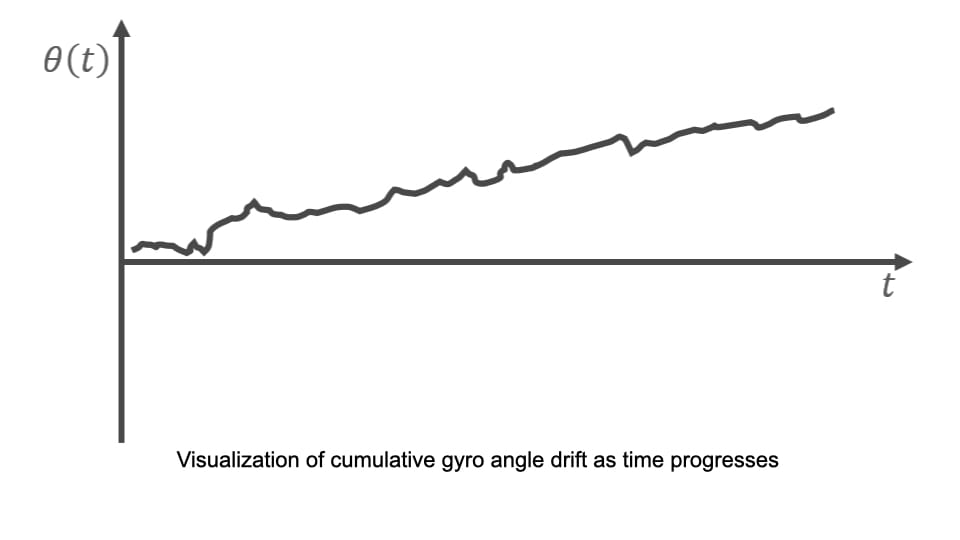
L'ARW n'est pas une spécification, c'est une horloge. Dès le démarrage de votre centrale inertielle, elle indique la vitesse à laquelle la précision d'orientation se dégrade. Plus sa valeur est basse, plus votre système conserve longtemps sa position correcte.
10 erreurs de conception courantes chez les ingénieurs lors de l'intégration d'IMU
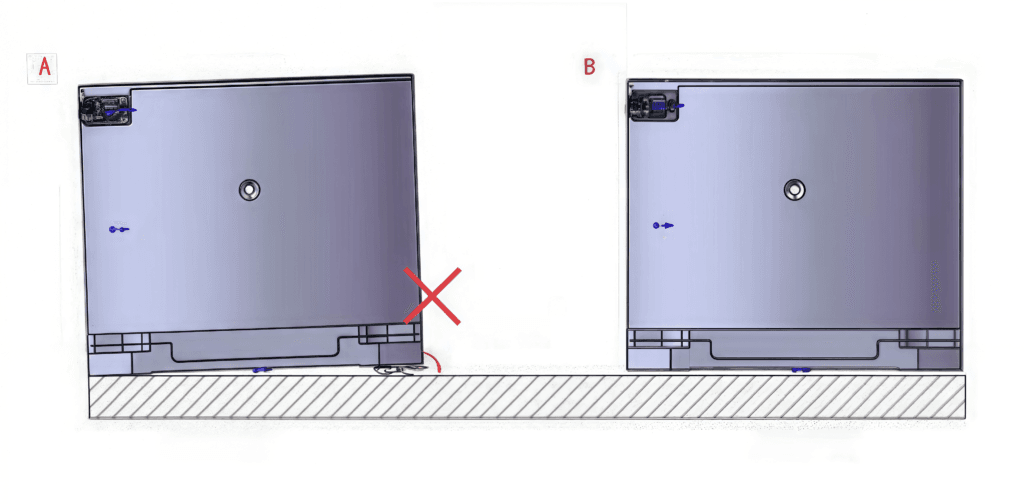
Les erreurs d'intégration des centrales inertielles peuvent compromettre la fiabilité de la navigation. Du mauvais alignement aux vibrations, en passant par un étalonnage insuffisant et une dépendance excessive à la fusion de capteurs, les ingénieurs commettent souvent les mêmes erreurs. Ce guide explore les 10 erreurs les plus fréquentes d'intégration des centrales inertielles, explique leurs conséquences et propose des solutions d'experts applicables à vos projets.
Technologie FOG pour le contrôle d'attitude des engins spatiaux : au-delà des limites des MEMS
Les gyroscopes à fibre optique surpassent les MEMS grâce à leur stabilité à long terme, leur résistance aux radiations et leur précision constante pendant des années. Ils sont indispensables aux satellites, aux constellations de satellites et aux sondes spatiales où la précision est primordiale.
Comment la fusion multisensorielle redéfinit les systèmes de navigation inertielle

La précision de la navigation inertielle est fondamentalement limitée par la qualité de la modélisation et de la compensation des erreurs des capteurs. Qu'il s'agisse de dérive de biais ou de marche aléatoire, une atténuation efficace requiert une combinaison de conception matérielle, de routines d'étalonnage et de correction algorithmique en temps réel.