La navegación submarina es implacable. Sin señales GPS, los vehículos submarinos dependen completamente de sensores inerciales para rastrear su posición. Una pequeña desviación por minuto puede generar kilómetros de error durante misiones largas. Para los operadores que mapean tuberías o exploran aguas profundas, estas desviaciones pueden significar misiones desperdiciadas, mayores costos y comprometer la seguridad. Por eso, la elección entre giroscopios de fibra óptica (FOG) y unidades de medición inercial (IMU) MEMS es crucial.
Los giroscopios FOG mantienen una deriva ultrabaja y una estabilidad a largo plazo en condiciones submarinas sin GNSS, mientras que las IMU MEMS ofrecen alternativas compactas y de bajo consumo más adecuadas para inspecciones de corta duración y plataformas sensibles a los costos.
El debate entre FOG y MEMS no se centra en qué tecnología es más reciente, sino en cuál resiste realmente las duras realidades de la navegación submarina. Al comparar su rendimiento en cuanto a precisión, resiliencia ambiental, tolerancia a las vibraciones, SWaP y factores del ciclo de vida, podemos identificar las ventajas y desventajas de cada tecnología. Esta perspectiva estructurada ayuda a los operadores a encontrar el sensor adecuado para la misión submarina adecuada.
Tabla de contenido
Precisión y deriva en misiones de larga duración: ¿Qué sensor funciona mejor?
Rendimiento de FOG
Los sensores FOG aprovechan el efecto Sagnac para medir la velocidad angular, independientemente de las piezas mecánicas. Este diseño ofrece tasas de deriva excepcionalmente bajas , a menudo <0,05 °/h, lo que los hace muy estables para misiones de 6 a 10 horas o más. En la cartografía submarina o la inspección de tuberías, los AUV equipados con FOG mantienen estimaciones de rumbo fiables sin actualizaciones externas constantes, lo que garantiza la precisión del estudio y la eficiencia de la misión.
Rendimiento de MEMS
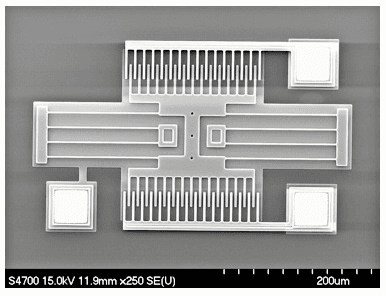
Los giroscopios MEMS miden la rotación a través de estructuras vibratorias. A pesar de las mejoras, su inestabilidad de polarización aún se encuentra en el rango de 1 a 10 °/h , lo que genera errores acumulativos significativos en entornos sin GNSS. Las unidades MEMS pueden gestionar inmersiones cortas o tareas de inspección de menos de una hora de duración, pero en periodos largos, la acumulación de deriva requiere una corrección frecuente mediante DVL, USBL o balizas acústicas. Esta dependencia limita la autonomía en operaciones en aguas profundas.
Comparación
FOG : Estabilidad inigualable, adecuada para estudios de larga duración.
MEMS : Adecuado únicamente para misiones de corto alcance y de tiempo limitado.
Veredicto : FOG es la mejor opción cuando la precisión a lo largo del tiempo es una misión crítica.
Robustez ambiental: ¿Qué tecnología soporta presiones y temperaturas submarinas extremas?
Robustez FOG
Los FOG utilizan bobinas ópticas y electrónica de estado sólido, lo que los hace inherentemente resistentes a la presión, la salinidad y las amplias variaciones térmicas . Al no haber estructuras vibratorias, la presión en profundidad tiene un efecto mínimo en el rendimiento. La deriva de temperatura es predecible y puede compensarse en fábrica, lo que garantiza una precisión de rumbo constante incluso en aguas árticas o tropicales.
Robustez de MEMS
Los sensores MEMS se construyen sobre microestructuras de silicio, sensibles a la expansión térmica, la tensión y las fluctuaciones de presión . Las condiciones submarinas, especialmente los cambios bruscos de temperatura o la alta salinidad, pueden degradar su estabilidad de polarización y la linealidad del factor de escala. Los algoritmos de compensación y la encapsulación ayudan, pero los sensores MEMS generalmente requieren una recalibración activa cuando varían las condiciones ambientales.
Comparación
FOG : Más robusto en exposición a largo plazo a ambientes submarinos.
MEMS : Sensible al estrés ambiental, requiere corrección frecuente.
Veredicto : FOG sigue siendo la opción confiable para misiones en aguas profundas, mientras que MEMS se adapta a entornos poco profundos o controlados.

Vibración y choque: ¿Qué sensor mantiene la estabilidad bajo cargas dinámicas?
Estabilidad FOG
Los giroscopios FOG, sin partes mecánicas móviles, son inherentemente menos sensibles a los errores inducidos por vibraciones. En plataformas submarinas como los AUV que operan cerca de corrientes marinas o los ROV que manejan herramientas, los FOG mantienen resultados estables incluso bajo microvibraciones constantes o impactos repentinos. Su diseño óptico garantiza que las cargas dinámicas tengan una influencia mínima en el sesgo y el factor de escala, razón por la cual los FOG son confiables en sistemas de contramedidas contra minas navales y construcción offshore.
Estabilidad de MEMS
Los sensores MEMS, a pesar de su robusta construcción a microescala, son inherentemente más vulnerables al ruido de vibración y a los impactos . Las estructuras vibratorias pueden captar frecuencias no deseadas, lo que provoca lecturas de velocidad angular falsas o inestabilidad temporal de la salida. Si bien las técnicas de amortiguación y filtrado mejoran el rendimiento, los giroscopios MEMS suelen requerir un procesamiento de señal exhaustivo para seguir siendo utilizables en entornos de alta vibración, como los drones submarinos propulsados por propulsores.
Comparación
- FOG : Proporciona lecturas estables bajo vibración y golpes repentinos, minimizando la propagación de errores.
- MEMS : Ligero pero propenso al ruido inducido por vibraciones, lo que requiere un filtrado pesado.
- Veredicto : Para plataformas expuestas a turbulencias, vibraciones inducidas por hélices u operaciones con herramientas submarinas, FOG claramente proporciona la solución más estable y a prueba de misiones.
Tamaño, peso y potencia: ¿Qué sensor se adapta a las plataformas con restricciones SWaP?
Características de FOG SWaP
Los sensores FOG tradicionalmente incorporan bobinas ópticas más grandes y requieren mayor potencia . Incluso con la reciente miniaturización, un FOG de grado táctico puede pesar varios cientos de gramos y consumir varios vatios de energía. En AUV pequeños o ROV con batería limitada, esto puede reducir la resistencia o la capacidad de carga útil. Sin embargo, en vehículos submarinos de escala media a grande, la compensación entre tamaño y potencia suele justificarse por su precisión y estabilidad inigualables.
Características de MEMS SWaP
Las IMU MEMS son intrínsecamente compactas, ligeras y energéticamente eficientes . Muchas unidades MEMS tácticas pesan menos de 50 gramos y funcionan con menos de 1 vatio. Esto las hace ideales para drones de inspección pequeños, unidades portátiles de navegación para buceadores o cargas útiles donde cada gramo y miliamperio cuenta. Su reducido tamaño permite su integración en espacios reducidos, lo que facilita el diseño ágil de vehículos.
Comparación
- FOG : Más voluminoso y con alto consumo de energía, ideal para plataformas con suficiente espacio y presupuestos de energía.
- MEMS : Optimizado para sistemas con restricciones SWaP, lo que permite diseños livianos y de bajo consumo.
- Veredicto : Cuando la compacidad y la eficiencia son prioridades principales, MEMS es la opción natural; para misiones que priorizan la precisión sobre la resistencia, FOG sigue siendo el punto de referencia.

Integración con ayudas submarinas: ¿Qué sensor funciona mejor con DVL y USBL?
Integración FOG
Los giroscopios FOG proporcionan una referencia de alta estabilidad que mejora considerablemente el rendimiento de los sistemas acústicos de registro de velocidad Doppler (DVL), línea de base ultracorta (USBL) y línea de base larga (LBL). Dado que las señales FOG se mantienen precisas a lo largo del tiempo, los sensores de asistencia pueden actualizarse con menor frecuencia, lo que reduce los errores de navegación incluso cuando las señales acústicas son intermitentes o están parcialmente bloqueadas. Esta sinergia convierte a las soluciones INS basadas en FOG en el estándar para los AUV de prospección y las misiones submarinas de larga duración.
Integración MEMS
Las IMU MEMS dependen en mayor medida de ayudas externas debido a su mayor deriva e inestabilidad de sesgo . Si bien se integran fácilmente con DVL y USBL gracias a su diseño ligero y optimizado para entornos digitales, la frecuente necesidad de correcciones aumenta la dependencia del sistema de las actualizaciones acústicas. En entornos ruidosos o con señal degradada, la navegación basada en MEMS puede presentar saltos o una calidad de posicionamiento degradada a menos que se refuerce con algoritmos avanzados de fusión de sensores.
Comparación
- FOG : Proporciona una columna vertebral estable para los sistemas de ayuda submarina, reduciendo la dependencia de correcciones frecuentes.
- MEMS : Fácil de integrar pero requiere actualizaciones externas constantes para compensar la desviación.
- Veredicto : Para misiones donde las actualizaciones acústicas pueden no ser confiables, FOG es la apuesta más segura; MEMS puede ser suficiente cuando la ayuda externa está garantizada y es frecuente.
Desde la estabilidad a la deriva hasta la resiliencia ambiental, la tolerancia a las vibraciones, el SWaP y la integración del sistema, la comparación hasta el momento deja claro que FOG generalmente supera a MEMS en condiciones submarinas exigentes, mientras que MEMS sigue siendo una opción práctica para misiones más livianas y cortas.
Sin embargo, el rendimiento por sí solo no define la solución adecuada. El costo, los requisitos de mantenimiento, la calidad de los datos y las aplicaciones comprobadas son igualmente decisivos a la hora de seleccionar un sensor para plataformas submarinas. En la Parte II, continuaremos esta exploración examinando la economía del ciclo de vida, el mantenimiento, la fiabilidad del mapeo y casos de uso reales, antes de tomar una decisión final sobre qué tecnología se comporta mejor bajo el agua.
