Las IMU MEMS de alta precisión suelen presentar un rendimiento inferior tras la integración. La deriva, la desalineación y los factores ambientales minan la precisión silenciosamente, hasta que aparecen fallos de campo. Siga cuatro reglas: alineación estricta, entorno controlado, calibración periódica y operación disciplinada para preservar la precisión real.
Las IMU MEMS de alta precisión ofrecen un rendimiento de detección de movimiento inigualable, pero solo si se usan correctamente. Esto revela cuatro errores críticos de uso que suelen causar pérdida de precisión y cómo prevenirlos en la integración en el mundo real.
Las IMU MEMS de alta precisión son la columna vertebral de la navegación moderna, desde drones hasta vehículos autónomos. Sin embargo, incluso los sensores de gama alta no funcionan correctamente si se manipulan incorrectamente. Esta guía expone las trampas ocultas que minan la precisión y muestra cómo los integradores pueden prevenirlas.
Tabla de contenido
Instalación: El punto de partida de cada IMU MEMS de alta precisión
Móntelo rígidamente, no suavemente
Una IMU MEMS solo informa de su propio movimiento, por lo que debe moverse exactamente igual que la plataforma. Para obtener resultados fiables, fije la unidad directamente a una estructura rígida mediante soportes metálicos o de fibra de carbono. Evite las almohadillas de goma u otros materiales blandos que se flexionen o absorban las vibraciones, ya que rompen la conexión mecánica y alteran los datos del sensor.
Si el aislamiento de vibraciones es inevitable, diseñelo cuidadosamente y verifique que las características de amortiguación no distorsionen la frecuencia de salida o la respuesta de fase de la IMU.
Alinee los ejes perfectamente
Incluso un pequeño desfase angular puede generar errores de posición importantes. Cuando una IMU MEMS de alta precisión se desalinea tan solo un grado, la desviación resultante puede alcanzar kilómetros tras un uso prolongado. Alinee siempre los ejes de la IMU con el marco de referencia del vehículo o aplique una calibración de alineación precisa después de la instalación.
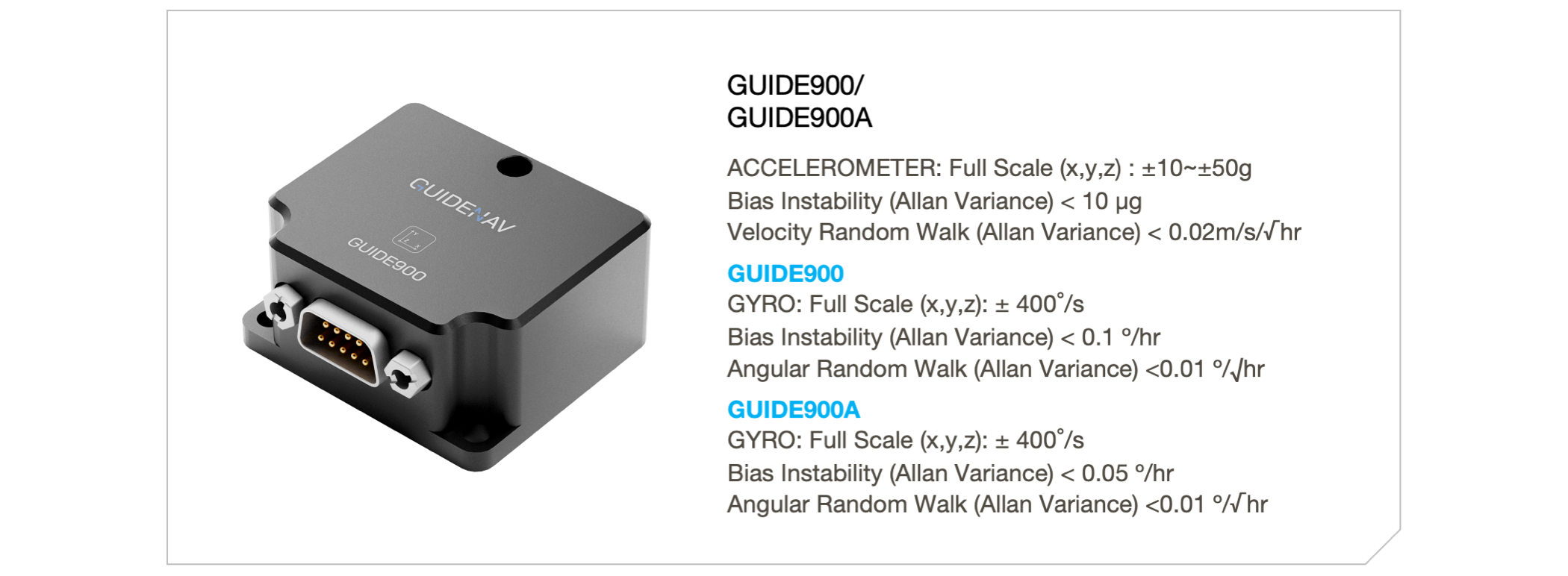
La IMU MEMS GuideNav GUIDE900 está calibrada de fábrica con una no linealidad de factor de escala de menos de 100 ppm y un acoplamiento de eje transversal por debajo de 200 ppm; sin embargo, una mala alineación de instalación puede anular rápidamente esa precisión.
Manténgase alejado de las zonas de vibración y estrés
La vibración continua o la tensión estructural alteran gradualmente las características internas de una IMU MEMS. Evite montar el sensor cerca de motores, cajas de cambios o uniones soldadas. Con el tiempo, estas influencias mecánicas pueden generar deriva de polarización y reducir la estabilidad a largo plazo.
Control ambiental: el enemigo oculto de la precisión de la IMU
La estabilidad de la temperatura lo es todo
La temperatura es la causa más común de deriva en una IMU MEMS de alta precisión. Cada sensor tiene un rango térmico de funcionamiento definido, típicamente de −40 °C a +85 °C. Las fluctuaciones repentinas pueden alterar el sesgo del cero o el factor de escala.
Mantenga la IMU MEMS en un entorno estable mediante aislamiento, flujo de aire controlado o elementos calefactores si es necesario. Todas las IMU MEMS GuideNav cuentan con compensación de temperatura completa en todo su rango, lo que garantiza una precisión constante en condiciones extremas.
La humedad puede dañar silenciosamente la precisión
La humedad es otra amenaza invisible. Cuando la humedad relativa supera el 85 %, puede infiltrarse en el encapsulado, corroer los circuitos y alterar el comportamiento del sensor. Incluso la condensación breve puede provocar saltos de polarización temporales. Proteja siempre la IMU de alta precisión dentro de una carcasa sellada con desecantes cuando opere en climas marinos o tropicales.
Evite las interferencias electromagnéticas (EMI)
Las líneas de alta corriente y los convertidores de potencia conmutados pueden generar ruido en el front-end analógico de una IMU MEMS. Para evitar interferencias, separe el cableado de alimentación de las líneas de señal, mantenga una conexión a tierra adecuada y utilice cables blindados. Un entorno electromagnético limpio es tan importante como la estabilidad mecánica para mantener la precisión a largo plazo.
Calibración: La clave para una IMU MEMS de alta precisión
La calibración de fábrica no dura para siempre
Cada IMU MEMS sale de fábrica calibrada en cuanto a polarización, factor de escala y ortogonalidad; sin embargo, estos parámetros varían con el tiempo debido a los ciclos de temperatura, la vibración y la tensión mecánica. Para mantener una IMU de alta precisión funcionando según las especificaciones, programe una recalibración periódica cada 6 a 12 meses, o antes en sistemas críticos.
Elija el enfoque de calibración adecuado
Si no es práctico quitar la IMU, realice una calibración a bordo o en tiempo real utilizando rutinas de alineación estática o una estimación asistida por GNSS.
Sin embargo, para restaurar la precisión por completo, se requiere una calibración de laboratorio en una mesa de velocidad o cámara térmica. Este método corrige los seis ejes y compensa la deriva dependiente de la temperatura, lo que garantiza que la IMU MEMS mantenga un rendimiento táctico en todos los entornos.
Verifique siempre el resultado
La calibración no está completa hasta su verificación. Compare los datos posteriores a la calibración con los perfiles de movimiento de referencia o sensores de referencia para confirmar la estabilidad y la precisión.
Descuidar la verificación puede dejar errores ocultos que degradan silenciosamente el rendimiento, frustrando el propósito de la recalibración.
Operación y manejo: la precisión reside en los detalles
Calienta antes de confiar en los datos
Una IMU MEMS necesita tiempo para alcanzar la estabilidad térmica y electrónica tras el encendido. La mayoría de las IMU de alta precisión requieren un periodo de calentamiento de 1 a 30 minutos, según el modelo y el entorno. Recopilar datos demasiado pronto puede generar un sesgo temporal varias veces superior a su valor nominal.
Evite los ciclos de encendido frecuentes
Encender y apagar repetidamente la IMU restablece sus filtros internos e introduce cambios transitorios en la polarización. Mantenga la IMU MEMS alimentada continuamente durante la recopilación de datos críticos para garantizar un rendimiento constante y una continuidad de datos fluida.
Manipular con cuidado — Siempre
A pesar de su diseño robusto, las IMU MEMS de alta precisión contienen microestructuras delicadas. Caídas, golpes o manipulación inadecuada pueden causar una degradación sutil pero permanente de la precisión. Durante el transporte, utilice contenedores acolchados y conectores seguros. Inspeccione regularmente los cables, soportes y carcasas; la tensión mecánica o el cableado suelto suelen preceder a la deriva del sensor.

Información experta de GuideNav
En GuideNav, hemos visto cómo un simple descuido (un montaje deficiente, una calibración incorrecta o una deriva térmica) puede convertir una IMU MEMS de alta precisión en un sensor poco fiable. La integración en el mundo real no se limita a las especificaciones, sino a la disciplina en la instalación, la calibración y el mantenimiento a largo plazo.
Por eso, las IMU MEMS GuideNav están diseñadas para integradores profesionales que exigen una precisión consistente y comprobada en campo. Cada unidad está totalmente compensada por temperatura, calibrada ortogonalmente y protegida por una robusta carcasa de aluminio diseñada para soportar las vibraciones y condiciones ambientales más adversas.
Ya sea que su proyecto involucre vehículos aéreos no tripulados, vehículos autónomos o robótica industrial, la aplicación de las prácticas adecuadas permitirá que su IMU MEMS funcione exactamente como fue diseñado: estable, confiable y lista para trabajos de misión crítica.
