Las unidades de medición inercial (IMU) son la columna vertebral de los sistemas de navegación en los misiles de merodeo. Proporcionan los datos necesarios para guiar el misil a su objetivo con alta precisión. Sin una IMU confiable, un misil lucharía para mantener una ruta de vuelo estable, que podría poner en peligro su misión.
Una unidad de medición inercial (IMU) es un dispositivo que mide la aceleración, la velocidad y la orientación de un objeto. El papel de la IMU para merodear el misil es esencial para garantizar que el misil alcance su objetivo con precisión.
En este artículo, desglosaré los componentes críticos que componen una IMU, las métricas clave para merogar aplicaciones de misiles y qué tipo de IMU es el más adecuado para estas operaciones de alto riesgo.
Tabla de contenido
¿Qué es una unidad de medición inercial (IMU)?
Una unidad de medición inercial (IMU) es un dispositivo que mide la aceleración, la velocidad y la orientación de un objeto. Funciona sin la necesidad de señales externas. Esta independencia lo hace ideal para su uso en entornos donde las señales GPS pueden no ser confiables. Dentro de una IMU, generalmente encontrarás acelerómetros y giroscopios. Estos sensores trabajan juntos para rastrear el movimiento y la rotación, asegurando que la ruta de vuelo del misil sea precisa.
Como ingeniero trabajó en la industria de navegación inercial durante más de 8 años, puedo decirle que el papel clave de la IMU es suministrar datos en tiempo real sobre la velocidad, posición y ángulo del misil. Esto permite que el sistema de control del misil ajuste la ruta de vuelo continuamente. Este nivel de precisión es vital para vuelos de larga duración y ataques dirigidos .
¿Por qué los misiles merodeadores dependen de la unidad de medición inercial (IMU)?
Los misiles de merodeo están diseñados para permanecer en el aire durante períodos prolongados mientras monitorean un objetivo. Para este propósito, la navegación precisa es esencial. La IMU permite que el misil ajuste su curso continuamente, compensando los cambios en la velocidad, el viento u otros factores ambientales. Si el misil carece de datos posicionales precisos, podría desviarse del curso. Y eso podría resultar en un fracaso de la misión o peor, un ataque fallido en el objetivo.
Para los sistemas de misiles, los datos de alta precisión no se trata solo de dirigir el misil a una ubicación general. Se trata de garantizar que el misil pueda maniobrar de manera precisa y confiable a largas distancias. El IMU es clave para lograr ese nivel de precisión. Sin ella, el misil no podría hacer correcciones de cursos en tiempo real. Eso significa mayores riesgos, recursos más desperdiciados y misiones menos efectivas.
Parámetros clave para merodear el misil IMUS
Cuando se trata de IMU para merodear misiles, la precisión no es negociable. Sin embargo, hay otros parámetros vitales a considerar. La estabilidad de sesgo de la IMU es crucial porque cualquier deriva puede conducir a errores con el tiempo. Del mismo modo, la velocidad de deriva determinará cuánto puede desviarse el sistema antes de requerir la recalibración. La IMU también debe entregar actualizaciones de datos rápidos con una latencia . La velocidad es crítica para los ajustes en tiempo real.
| Parámetro | Descripción | Importancia para merodear misiles |
|---|---|---|
| Precisión | La capacidad de la IMU para medir el movimiento exacto. | Necesario para mantener el misil en curso durante vuelos largos. |
| Estabilidad del sesgo | La consistencia de las lecturas del sensor con el tiempo. | Previene la deriva gradual que puede arrojar el camino del misil. |
| Tasa de deriva | La tasa a la que se desvían las lecturas de la IMU. | La baja deriva asegura una precisión continua sin recalibración. |
| Estado latente | El retraso entre la entrada del sensor y la salida. | El procesamiento rápido es crucial para las correcciones de curso inmediato. |
Como alguien con años de experiencia en sistemas de navegación inercial, he visto de primera mano cómo la baja deriva y el tiempo de respuesta rápido pueden marcar la diferencia en una misión exitosa. Las IMU con poca estabilidad de sesgo o altas tasas de deriva simplemente no pueden ofrecer el rendimiento requerido, particularmente en los sistemas de misiles que necesitan hacer ajustes rápidos y frecuentes.
Requisitos de precisión de IMU de misiles merodeadores
La precisión (estabilidad de sesgo) de la unidad de medición inercial para un misil merodeador puede variar según la complejidad de la misión y la dependencia de los sistemas de navegación externos. A continuación se muestra un resumen de los de estabilidad de sesgo para diferentes escenarios:
1. Misiones de huelga de alta precisión (por ejemplo, ataques guiados por precisión)
- Estabilidad de sesgo : 01 °/h a 0.1 °/hr
Razón:
- Se requiere una alta precisión para una participación objetivo precisa, especialmente para escenarios de misión complejos que involucran ataques de precisión.
- La IMU necesita garantizar un vuelo estable y una orientación precisa, especialmente durante el enfoque final.
Tipo de IMU recomendado : F iber o ptic g y roscopio IMU
Modelo de IMU de niebla recomendado GFIMU 400, GFIMU 500

2. Misiones de precisión moderadas (por ejemplo, huelgas generales de campo de batalla)
- Estabilidad de sesgo : 1 °/h a 0.5 °/hr
Razón:
- Se necesita precisión moderada para las misiones generales de campo de batalla donde el objetivo puede ser menos crítico o el área de participación más flexible.
- La IMU puede complementarse con otros sistemas de guía, como sistemas visuales o basados en GPS, para mantener la precisión.
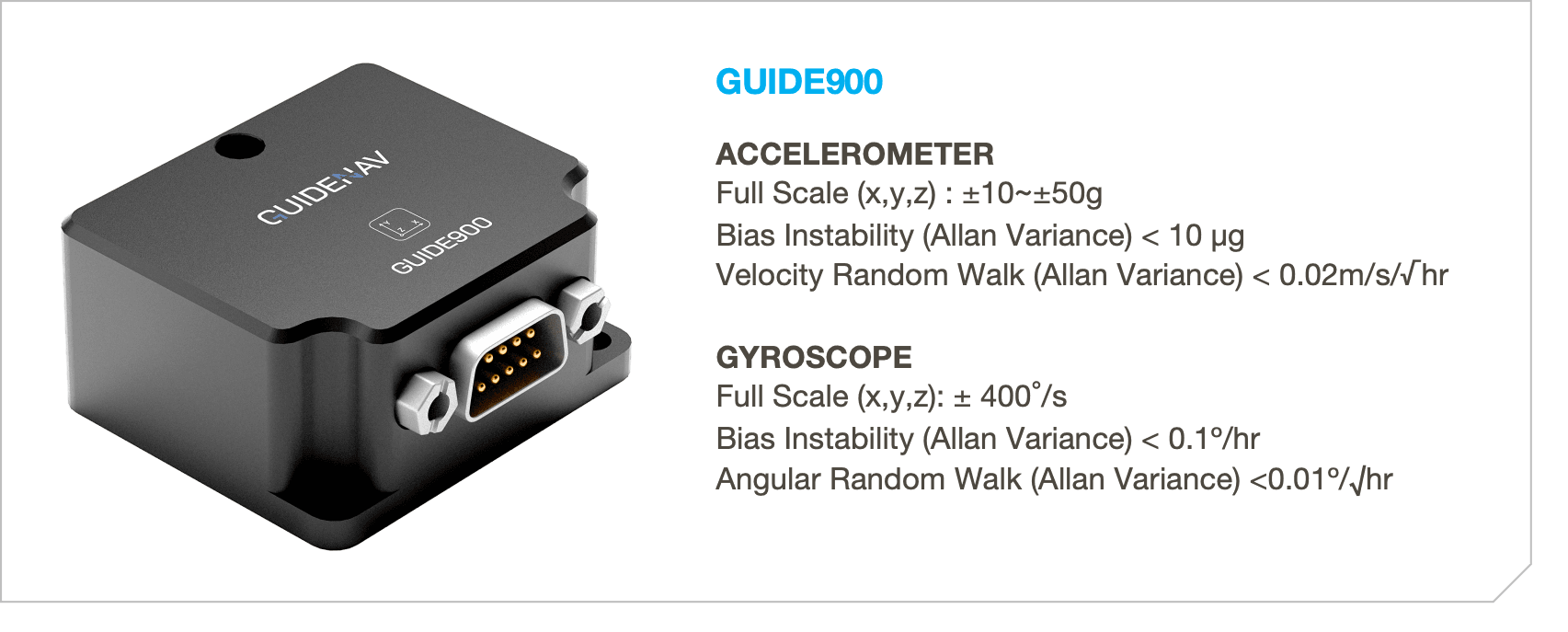
Tipo de IMU recomendado : MEMS IMU o FOG IMU (dependiendo de los requisitos de la misión)
Modelo IMU de MEMS recomendado: Guía900
3. Misiones de bajo costo o más simples (por ejemplo, atacando objetivos de menor valor o en movimiento)
- Estabilidad de sesgo : 5 °/h a 2.5 °/hr
Razón:
- Para misiles de merodeo de bajo costo o objetivos menos críticos, la precisión de IMU puede relajarse, especialmente cuando el tiempo de vuelo es corto o la complejidad de la misión es baja.
- Estos sistemas pueden depender más de la navegación de la plataforma (por ejemplo, UAV) o sensores integrados simples, reduciendo la necesidad de IMU de alta precisión.
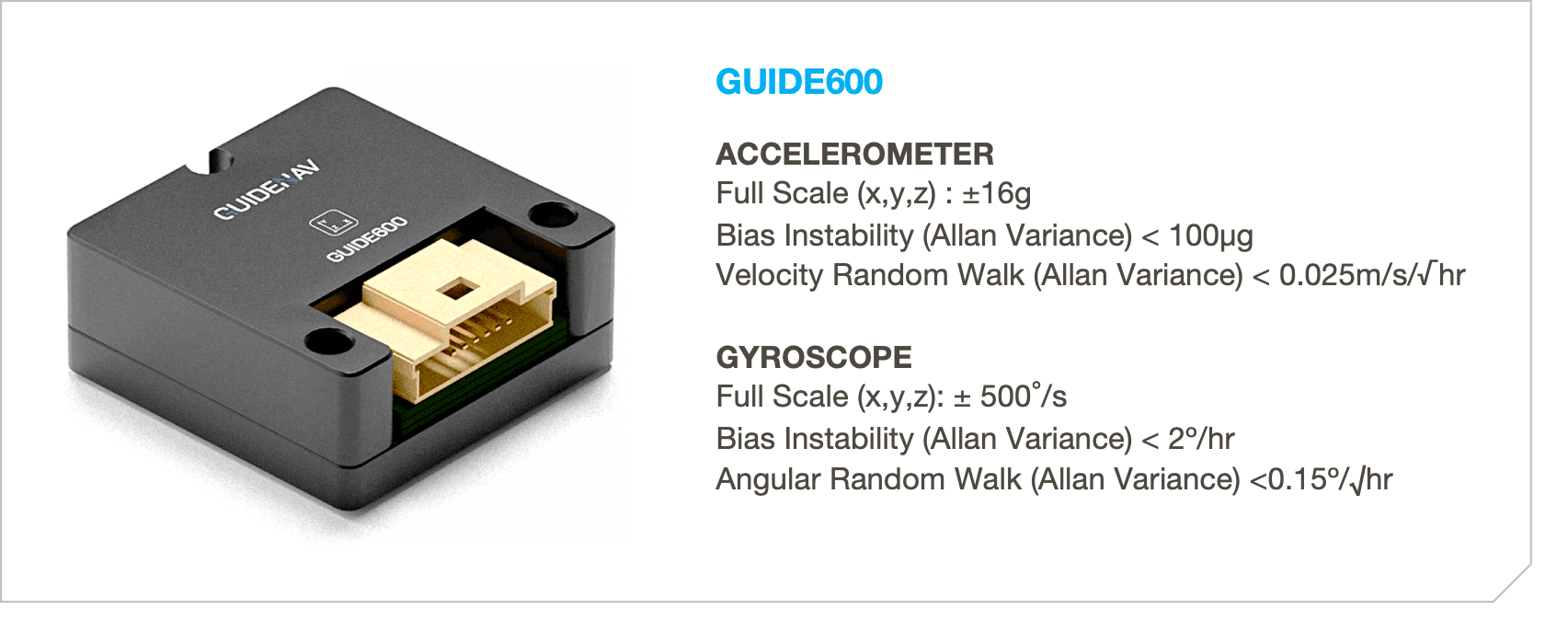
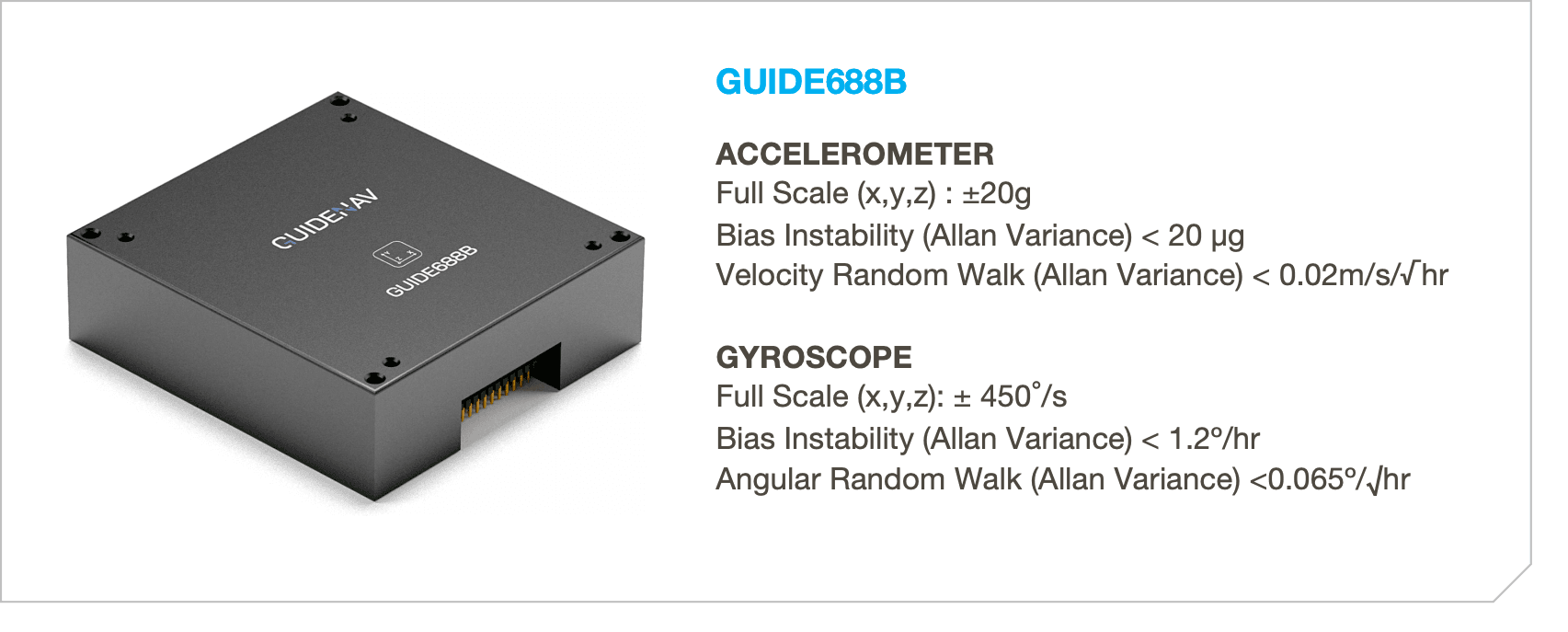
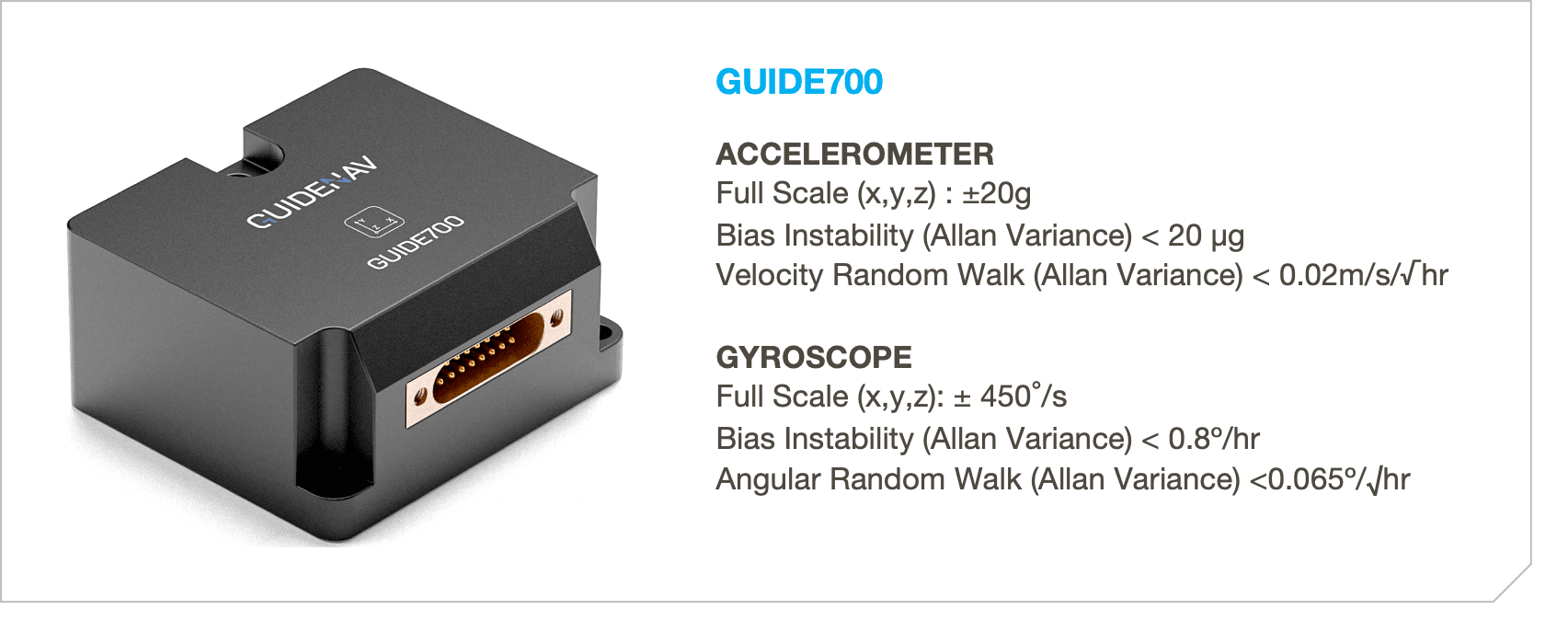
Tipo de IMU recomendado : MEMS IMU
Modelo IMU de MEMS recomendado: Guía700, Guía 688 B , Guía 600
4. Misiones dependientes del sensor (por ejemplo, depender de sensores externos para la orientación)
- Estabilidad de sesgo : 5 °/HR a 5 °/HR
Razón:
- Para las misiones que dependen en gran medida de los sensores externos (por ejemplo, visual, radar o GPS), la precisión de la IMU puede relajarse a medida que los sistemas externos realizan la mayor parte de la navegación y la orientación.
- La IMU sirve principalmente como un sensor complementario, con la dependencia principal de los datos externos para el éxito de la misión.
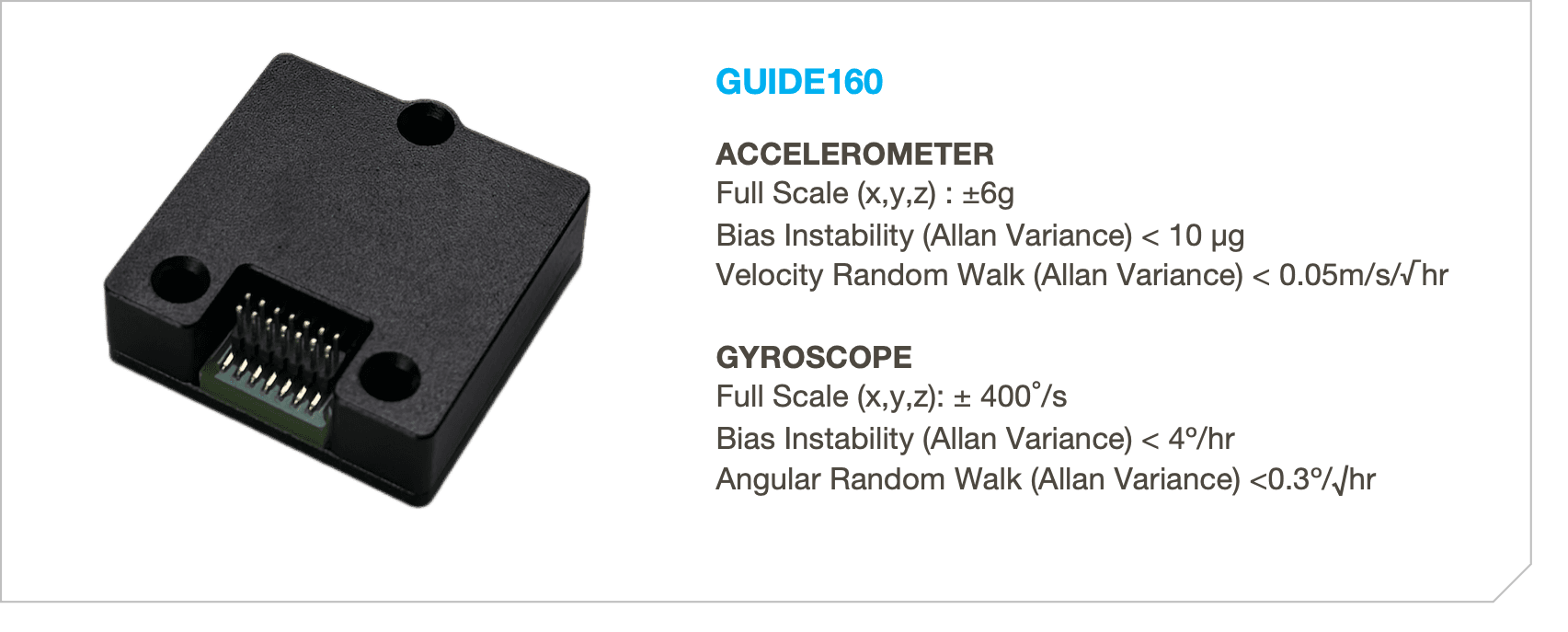
Tipo de IMU recomendado : MEMS IMU
Modelo IMU de MEMS recomendado: Guía160
Referencias
Para los sistemas de misiles, los datos de alta precisión no se trata solo de dirigir el misil [^1] a una ubicación general.
[^1]: Explorar la mecánica detrás de la dirección El misil ofrece información sobre tecnologías avanzadas de orientación de misiles y su eficiencia operativa.
Las métricas clave para merodear aplicaciones de misiles [^2]
[^2]: Comprender las métricas clave para merodear aplicaciones de misiles puede proporcionar información sobre su efectividad operativa y su valor estratégico.