Como experto experimentado en sistemas inerciales, puedo decir que la guía inercial es una tecnología central en muchas aplicaciones de alta precisión, desde misiles militares y naves espaciales hasta vehículos aéreos no tripulados (UAV) y robótica . Proporciona un medio de navegación confiable y autónomo, especialmente en entornos donde las señales de GPS no están disponibles o no son confiables.
La guía inercial es un método de navegación que permite que un objeto, como un misil, un avión, una nave espacial o incluso un robot, determine su posición y orientación sin la necesidad de referencias externas como GPS, radar o balizas. Se basa en sensores inerciales , como giroscopios y acelerómetros , para medir cambios en la velocidad y dirección, que luego se utilizan para calcular la posición y trayectoria del objeto.
Esta guía explora sus componentes y aplicaciones principales. Profundicemos en los conceptos básicos de la guía inercial, aprovechando nuestros años de experiencia para resaltar cómo esta tecnología logra una navegación sólida y precisa.
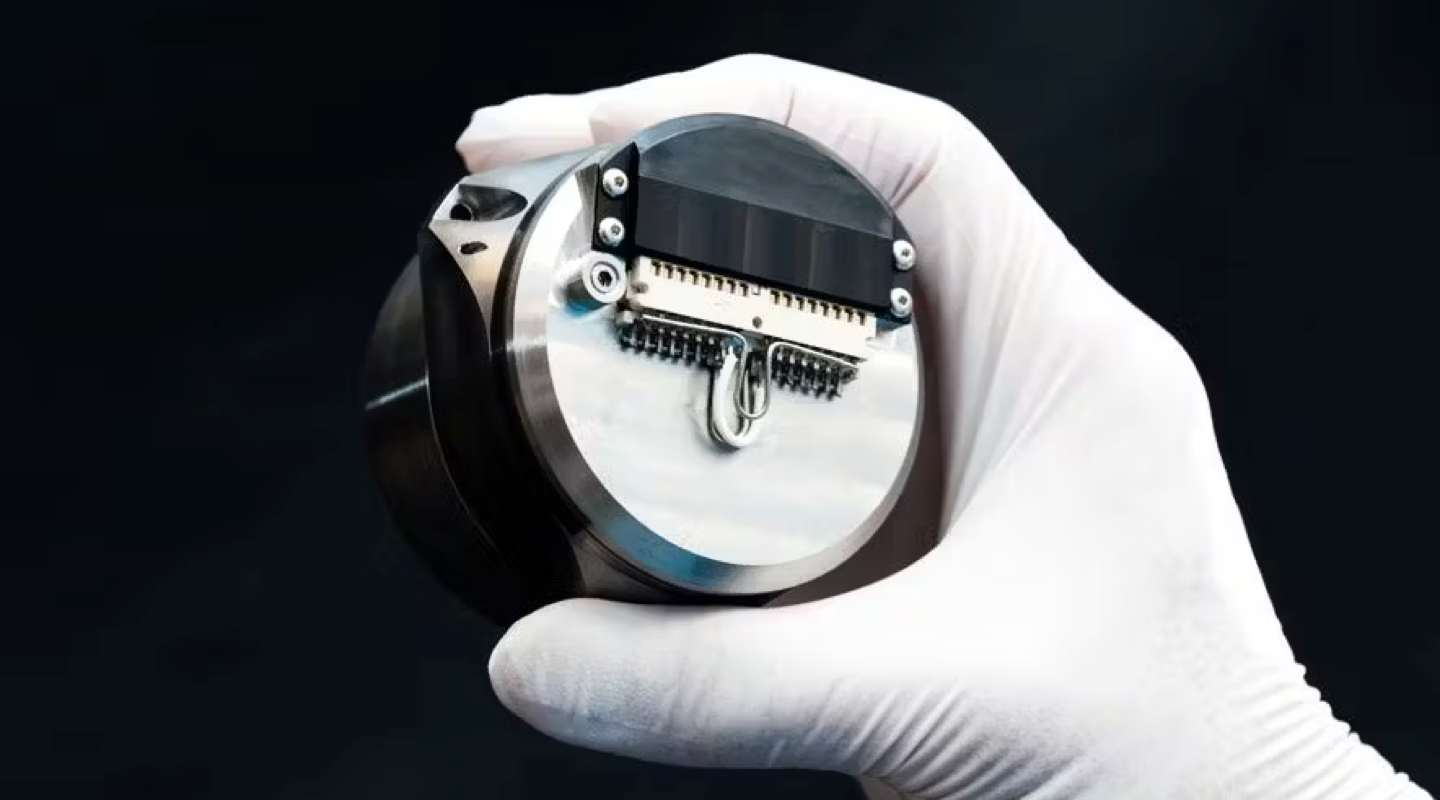
Tabla de contenido
¿Qué es la guía inercial y cuáles son sus componentes principales?
Por mi experiencia trabajando con varios clientes en el sector aeroespacial, de defensa y robótica, sé que el rendimiento de cualquier sistema de guía inercial depende de los componentes que lo componen. Estas son las partes principales en las que confío en los sistemas con los que hemos trabajado:
| Componente | Descripción | Función |
|---|---|---|
| Unidad de medida inercial (IMU) | El núcleo del sistema, que normalmente consta de giroscopios y acelerómetros. | Mide el movimiento rotacional y lineal para determinar la orientación y la posición. |
| giroscopios | Sensores que miden el movimiento de rotación a lo largo de tres ejes (cabeceo, balanceo y guiñada). | Siga la orientación del objeto, asegurándose de que mantenga su rumbo. |
| Acelerómetros | Sensores que miden la aceleración lineal a lo largo de diferentes ejes. | Mide los cambios en la velocidad, lo que ayuda a calcular la posición y la velocidad. |
| Algoritmos de navegación | Algoritmos matemáticos que procesan los datos de la IMU para calcular la posición, la velocidad y la orientación. | Integre datos de sensores para actualizar estimaciones de posición en tiempo real. |
| Sistema de control | Un sistema que ajusta el movimiento del objeto en función de la posición y orientación calculadas. | Garantiza que el objeto siga una ruta predeterminada o se ajuste a nuevos objetivos. |
| Fuente de alimentación | Proporciona energía a los sensores inerciales y al sistema de control. | Mantiene el sistema en funcionamiento, a menudo utilizando baterías integradas o unidades de administración de energía. |
| Mecanismos de retroalimentación (opcional) | Se pueden integrar sistemas externos como GNSS, magnetómetros o barómetros para corregir derivas y errores. | Ayude a corregir cualquier desviación en el sistema inercial y mejore la precisión a largo plazo. |
¿Cómo funcionan juntos estos componentes?
En un sistema de guía inercial, los componentes clave deben funcionar juntos a la perfección para garantizar que el sistema pueda realizar tareas de navegación y control con precisión y en tiempo real. Según mis años de experiencia, la sinergia entre estos componentes es fundamental para lograr un rendimiento confiable. A continuación se muestra un desglose de cómo estos componentes interactúan y funcionan juntos:
1. Recopilación de datos de la IMU
En el núcleo del sistema se encuentra la Unidad de Medición Inercial (IMU) , que consta de giroscopios y acelerómetros . aceleración y el movimiento de rotación del objeto . orientación del objeto (como cabeceo, balanceo y guiñada), mientras que los acelerómetros miden la aceleración lineal , lo que ayuda a rastrear los cambios en la velocidad y la posición. Estos datos sirven como base para todos los cálculos de navegación posteriores.

2. Los algoritmos de navegación procesan los datos.
Los datos recopilados por la IMU se pasan a los algoritmos de navegación , que utilizan modelos matemáticos para procesar esta información. Específicamente, los datos del sensor (aceleración y tasas de rotación) se integran a lo largo del tiempo para calcular la posición , velocidad y orientación . Estos cálculos proporcionan datos de navegación en tiempo real que se utilizan para controlar el sistema y guiar el objeto a lo largo de su trayectoria.

3. El sistema de control ajusta el movimiento
Según los resultados de los algoritmos de navegación, el sistema de control realiza ajustes en tiempo real al movimiento del objeto. Por ejemplo, si el objeto se desvía de su trayectoria deseada, el sistema de control ajustará el sistema de propulsión o las superficies de control (como timones o propulsores) para corregir su rumbo, asegurando que el objeto permanezca en su trayectoria prevista.
4. Los mecanismos de retroalimentación corrigen la deriva
Muchos sistemas de guía inercial también están equipados con mecanismos de retroalimentación , como el GNSS (Sistema Global de Navegación por Satélite) u otros sensores externos (por ejemplo, magnetómetros, barómetros). Estos sistemas de retroalimentación funcionan junto con la IMU para corregir desviaciones y errores a lo largo del tiempo. Especialmente en misiones de larga duración, los sensores externos proporcionan correcciones periódicas para recalibrar el sistema inercial, asegurando que la precisión se mantenga durante períodos prolongados.
5. La fuente de alimentación garantiza la estabilidad del sistema
La fuente de alimentación es crucial para el funcionamiento de todos los componentes del sistema. Garantiza que la IMU, el sistema de control, los algoritmos de navegación y los mecanismos de retroalimentación reciban un flujo continuo de energía. La gestión eficiente de la energía es esencial, particularmente para operaciones de larga duración, como en naves espaciales o sistemas de guía de misiles, donde la confiabilidad y la estabilidad son críticas.
Aplicaciones de la guía inercial
La guía inercial es una tecnología fundamental en una amplia gama de industrias que requieren navegación autónoma y control preciso . La capacidad de operar sin depender de señales externas, como GPS o señales de radio, hace que la guía inercial sea indispensable en muchas aplicaciones críticas. Estas son las principales áreas donde se utilizan habitualmente los sistemas de guiado inercial:
1. Militar y Defensa
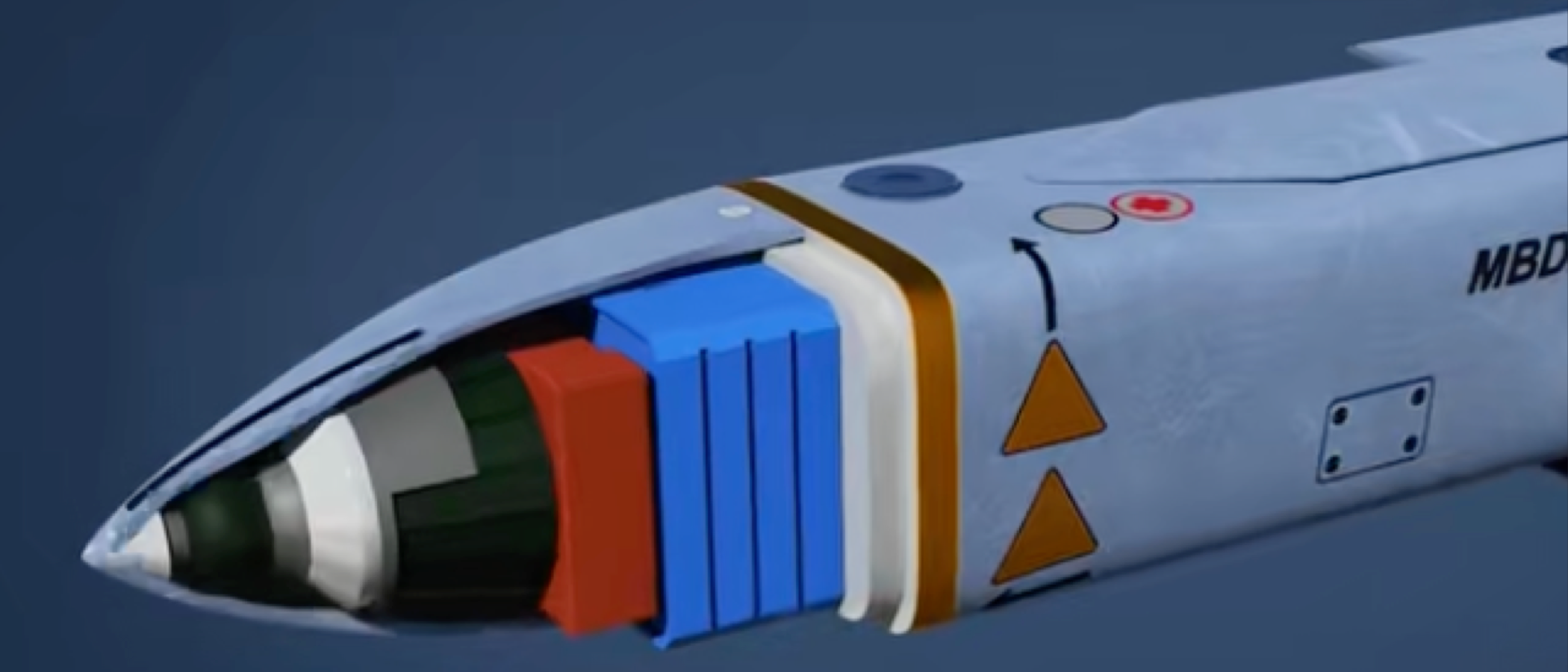
Una de las aplicaciones más conocidas de la guía inercial es en el ámbito militar y de defensa . Los sistemas de guía inercial son cruciales para la guía de misiles , torpedos y vehículos aéreos no tripulados (UAV) . Estos sistemas garantizan que los proyectiles o vehículos permanezcan en el camino correcto hacia su objetivo, incluso en entornos donde las señales de GPS no están disponibles o están bloqueadas intencionalmente.
| Solicitud | Objetivo | Beneficio clave |
|---|---|---|
| Orientación de misiles | Garantiza que los misiles alcancen los objetivos previstos. | Proporciona precisión e independencia de señales externas. |
| torpedos | Rastrea objetivos submarinos en entornos sin GPS | Opera en submarinos y subacuáticos sin dependencia de señales externas |
| UAV (Drones) | Vuelo autónomo para vigilancia y reconocimiento. | Opera en áreas urbanas o zonas sin GPS donde las señales satelitales pueden ser débiles |
2. Aeroespacial
En aeroespaciales , la guía inercial es esencial para la navegación de naves espaciales , el control de actitud de las aeronaves y el posicionamiento de satélites . Permite las misiones espaciales funcionen de forma autónoma sin depender de fuentes externas, lo cual es especialmente importante para la exploración del espacio profundo o sistemas satelitales donde las señales GPS no están disponibles.
| Solicitud | Objetivo | Beneficio clave |
|---|---|---|
| Navegación de naves espaciales | Garantiza un movimiento y una orientación precisos en el espacio. | Proporciona control autónomo en el espacio profundo. |
| Control de actitud de aeronaves | Mantiene el cabeceo, la guiñada y el balanceo del avión. | Garantiza estabilidad y control en turbulencias. |
| Posicionamiento satelital | Mantiene los satélites en órbita o en la trayectoria correcta. | Opera en el espacio sin necesidad de GPS |
3. Vehículos autónomos
La guía inercial es un componente crítico de los vehículos autónomos . Ya sea para automóviles , camiones autónomos o drones , la guía inercial ayuda a mantener una navegación precisa incluso cuando las señales de GPS son débiles, obstruidas o no están disponibles. Permite una localización precisa en entornos urbanos o espacios subterráneos donde no se puede confiar en el GPS.
| Solicitud | Objetivo | Beneficio clave |
|---|---|---|
| Coches autónomos | Garantiza la navegación autónoma por entornos urbanos. | Proporciona seguimiento de posición en tiempo real sin GPS |
| Camiones Autónomos | Permite que los camiones circulen por carreteras o almacenes | Proporciona navegación independiente en zonas denegadas por GPS. |
| Drones | Permite a los drones navegar sin GPS o en zonas obstruidas | Garantiza un vuelo seguro y preciso en entornos urbanos o interiores. |
4. Navegación Marina y Subacuática
Los sistemas de guía inercial se utilizan mucho en la navegación marina y la exploración submarina . Los submarinos , los vehículos submarinos autónomos (AUV) y los vehículos operados a distancia (ROV) dependen de la guía inercial para navegar a través de océanos profundos , donde las señales de GPS no pueden llegar. Estos sistemas proporcionan seguimiento de posición preciso y ajustes de orientación para garantizar el movimiento y la exploración correctos.
| Solicitud | Objetivo | Beneficio clave |
|---|---|---|
| submarinos | Navegación autónoma bajo el agua. | Proporciona navegación autónoma en entornos sin GPS |
| AUV (vehículos submarinos autónomos) | Permite la exploración submarina y la recopilación de datos. | Opera en aguas profundas sin dependencia del GPS |
| ROV (vehículos operados a distancia) | Utilizado para control remoto y navegación bajo el agua. | Garantiza movimientos precisos para tareas como inspección y topografía. |
5. Robótica y Automatización Industrial
En robótica y automatización industrial , la guía inercial ayuda a mantener la posición y orientación de brazos robóticos , vehículos guiados automatizados (AGV) y otros sistemas automatizados. Estos sistemas se basan en guía inercial para una planificación precisa de rutas y seguimiento de movimiento para ejecutar tareas en fábricas, almacenes o incluso en entornos peligrosos.
| Solicitud | Objetivo | Beneficio clave |
|---|---|---|
| Brazos Robóticos | Proporciona precisión en tareas como montaje o fabricación. | Permite que los robots ejecuten tareas de forma autónoma con alta precisión |
| AGV (vehículos guiados automatizados) | Navegar de forma autónoma en almacenes o fábricas | Garantiza un movimiento eficiente y un seguimiento de trayectorias en ambientes interiores. |
| Cirugía Robótica | Garantiza movimientos precisos durante la cirugía. | Proporciona una guía precisa para las herramientas quirúrgicas durante operaciones mínimamente invasivas. |
¿En qué se diferencia la guía inercial de los sistemas de navegación inercial?
Los sistemas de guía inercial y navegación inercial son dos tecnologías estrechamente relacionadas pero distintas que sirven para propósitos diferentes, y comprender las diferencias entre ellas es crucial para seleccionar el sistema adecuado para aplicaciones específicas.
Cuando hablamos de guía inercial , nos centramos principalmente en guiar y controlar el movimiento de un objeto, como un misil, un dron o una nave espacial. Estos sistemas no sólo rastrean la posición de un objeto sino que también ajustan activamente su trayectoria para garantizar que mantenga su rumbo. Por otro lado, los sistemas de navegación inercial (INS) están diseñados para rastrear e informar la posición, velocidad y orientación del objeto sin necesariamente realizar correcciones en su movimiento. Si bien INS proporciona los datos , no controla directamente el movimiento del objeto.
En mi experiencia, comprender las distinciones funcionales entre estos sistemas es clave para aplicarlos de manera efectiva en campos como la defensa , el aeroespacial y los vehículos autónomos . La guía inercial se trata de la corrección de la trayectoria en tiempo real y la adquisición de objetivos , mientras que la navegación inercial se trata del seguimiento de la posición y el mantenimiento de un marco de referencia preciso a lo largo del tiempo.
1. Función primaria
- Sistemas de guía inercial (IGS) : la función principal de un sistema de guía inercial es controlar y guiar el movimiento de un objeto (como un misil, un dron o una nave espacial) hacia un objetivo o destino específico. Se centra en guiar el objeto ajustando continuamente su trayectoria en función de los datos de sus sensores internos (principalmente giroscopios y acelerómetros). El sistema realiza correcciones en tiempo real para garantizar que el objeto permanezca en el camino correcto hacia su objetivo.
- Sistemas de navegación inercial (INS) : por el contrario, los sistemas de navegación inercial están diseñados para proporcionar posicionamiento y seguimiento. Calculan continuamente la posición, velocidad y orientación basándose en los datos de acelerómetros y giroscopios. El objetivo principal de un INS es rastrear dónde está el objeto y qué tan rápido se mueve, sin referencias externas (por ejemplo, GPS). No controla directamente el movimiento del objeto, sino que proporciona datos precisos de ubicación y velocidad .
2. Control versus seguimiento
- Sistemas de guía inercial : estos sistemas no solo rastrean la posición y orientación de un objeto sino que también controlan su movimiento . El sistema de guía calcula los ajustes necesarios para mantener una trayectoria o camino específico hacia un objetivo. Por ejemplo, en un misil , el sistema de guía inercial ajustará la trayectoria de vuelo del misil para garantizar que alcance su objetivo, realizando correcciones en tiempo real en la velocidad, dirección y altitud del misil.
- Sistemas de Navegación Inercial : Los sistemas INS, en cambio, están más enfocados al posicionamiento . Rastrean e informan dónde se encuentra el objeto en el espacio, y a menudo se usan junto con otros sistemas (como el GPS) para su corrección. Un INS no controla necesariamente el movimiento del objeto, pero proporciona datos críticos para la navegación , lo que permite a los operadores saber exactamente dónde está el objeto y hacia dónde se dirige.
3. Ejemplos de aplicación
- Sistemas de guía inercial: Estos se encuentran típicamente en militar, exploración espacial, y vehículos autónomos. Se utilizan para guiar proyectiles (por ejemplo, misiles), naves espaciales o drones, asegurando que mantengan el rumbo para alcanzar un objetivo o completar una misión. Por ejemplo:
- La guía del misil garantiza que el misil alcance su objetivo ajustando constantemente su trayectoria en función de mediciones inerciales.
- Las naves espaciales utilizan guía inercial para ajustar su trayectoria y mantener su orientación en el espacio.
- Los vehículos aéreos no tripulados (UAV) se basan en guía inercial para el seguimiento de objetivos y el vuelo autónomo .
- Sistemas de navegación inercial: Los sistemas INS se utilizan principalmente en aeroespacial, marina, y robóticaaplicaciones, donde conocer la ubicación y orientación exacta de un objeto es crucial. Por ejemplo:
- Los aviones utilizan el INS para la navegación cuando vuelan largas distancias, especialmente cuando están fuera de la cobertura del GPS.
- Los submarinos utilizan INS para la navegación submarina, donde no llegan las señales de GPS.
- La robótica se basa en INS para el seguimiento de la posición y el movimiento autónomo dentro de un área definida.
4. Correcciones en tiempo real
- Sistemas de guía inercial : el sistema de guía suele utilizar datos en tiempo real para realizar correcciones inmediatas. El sistema ajusta continuamente la trayectoria del objeto para garantizar que alcance su objetivo, incorporando a menudo de seguimiento y retroalimentación (como sensores externos o GPS) para corregir cualquier desviación.
- Sistemas de navegación inercial datos de posición en tiempo real , normalmente no realiza ajustes en la trayectoria del objeto. En cambio, se basa en correcciones externas (por ejemplo, GPS, radar) para reducir la deriva causada por las imprecisiones del sensor a lo largo del tiempo. El INS rastrea el movimiento pero no actúa como fuerza correctiva o guía.
5. Complejidad del sistema
- Sistemas de guía inercial : Estos sistemas son generalmente más complejos ya que no sólo tienen que calcular la posición y la orientación sino que también necesitan ajustar activamente el movimiento . Esto requiere algoritmos de control e integración con otros sistemas de guía o seguimiento de objetivos. Los sistemas de guía suelen incluir mecanismos como servomotores , control de empuje y sistemas de control de vuelo para realizar correcciones en tiempo real.
- Sistemas de navegación inercial : los sistemas INS tienen un concepto más simple en comparación con los sistemas de guía. Están diseñados principalmente para rastrear e informar el movimiento, a menudo basándose en de fusión de sensores para mejorar la precisión. Los sistemas INS son cruciales para el seguimiento continuo de la posición , pero no controlan el movimiento del objeto.
Resumen de diferencias:
| Aspecto | Sistemas de guía inercial (IGS) | Sistemas de navegación inercial (INS) |
|---|---|---|
| Función primaria | Guía y controla el movimiento. | Sigue la posición, velocidad y orientación. |
| Control | Controla el movimiento del objeto (correcciones en tiempo real) | No controla el movimiento, solo rastrea la posición. |
| Aplicaciones | Militar (misiles), aeroespacial (naves espaciales), vehículos aéreos no tripulados | Aeroespacial, marino, robótica, vehículos autónomos. |
| Correcciones | Ajustes en tiempo real a la trayectoria. | Proporciona datos; Requiere correcciones externas a lo largo del tiempo. |
| Complejidad | Más complejo debido a las funciones de control y guía. | Más sencillo, principalmente para seguimiento de posición. |
| Comentario | A menudo utiliza retroalimentación para ajustes de trayectoria. | Normalmente se basa en sensores internos y correcciones externas ocasionales. |
El futuro de la guía inercial
1. Precisión y autonomía mejoradas en defensa
En aplicaciones militares , la guía inercial ya se utiliza en misiles guiados , vehículos aéreos no tripulados (UAV) y drones autónomos . A medida que la fusión de sensores y los algoritmos de IA , los sistemas futuros ofrecerán una precisión aún mayor , mayor autonomía y la capacidad de operar en entornos donde las señales externas (por ejemplo, GPS) no están disponibles o están bloqueadas.
¿Qué sigue?
- Misiles guiados totalmente autónomos correcciones de rumbo en tiempo real .
- UAV autónomos capaces de completar misiones sin apoyo externo.
2. Exploración espacial y control de satélites
En el campo de la exploración espacial , la guía inercial seguirá siendo la piedra angular de las sondas espaciales autónomas y la navegación por satélite . A medida que las misiones espaciales se vuelvan más complejas y remotas, la guía inercial proporcionará un control ininterrumpido en el espacio profundo y más allá de la atmósfera terrestre.
¿Qué sigue?
- Sistemas inerciales avanzados para misiones interplanetarias, que garantizan ajustes precisos de la trayectoria.
- Sondas espaciales autónomas que navegan sin depender de sistemas terrestres.
3. Integración con IA para un rendimiento adaptativo
Los futuros sistemas de guía inercial integrarán la IA y el aprendizaje automático , lo que permitirá que los sistemas se adapten dinámicamente a entornos cambiantes. Esta integración mejorará la corrección de errores , la compensación de deriva y optimizará los ajustes de trayectoria basados en datos en tiempo real y parámetros de la misión.
¿Qué sigue?
- Sistemas de guiado con autoaprendizaje que adaptan continuamente su rendimiento en vuelo o movimiento.
- Toma de decisiones impulsada por IA para drones autónomos y aplicaciones militares, mejorando la eficiencia operativa.
4. Mayor durabilidad y confiabilidad en entornos hostiles
A medida que los sistemas de guía inercial se utilicen en entornos cada vez más desafiantes, como las profundidades marinas o el espacio , su robustez mejorará significativamente. Con materiales avanzados y diseños innovadores , estos sistemas serán más duraderos y confiables, soportando temperaturas extremas, cambios de presión y vibraciones.
¿Qué sigue?
- Sistemas inerciales resistentes para submarinos , exploración espacial y aplicaciones militares de alto rendimiento .
- Sistemas redundantes para garantizar la fiabilidad incluso en los entornos más hostiles.
5. Miniaturización e Integración con Sistemas Autónomos
La miniaturización de los sensores inerciales continuará, permitiendo sistemas más pequeños e integrados para su uso en vehículos autónomos , robótica y tecnología de drones . Estos sistemas más pequeños no sólo reducirán el peso y el coste sino que también mejorarán el rendimiento de y navegación autónomas .
¿Qué sigue?
- Sistemas de guía inercial más pequeños integrados en vehículos terrestres autónomos y drones para mejorar la independencia en áreas sin GPS.
- Navegación autónoma de entornos complejos con guiado inercial en tiempo real .