Los sensores inerciales son imperfectos por naturaleza. La deriva de sesgo, el desplazamiento aleatorio y la sensibilidad térmica no son anomalías, sino comportamientos esperados. Lo importante no es eliminar estos errores, sino gestionarlos.
Con los años, he aprendido que una navegación inercial fiable no depende únicamente de las especificaciones del sensor, sino de la comprensión y la compensación de esas imperfecciones. Tanto si se utilizan MEMS como FOG, el éxito depende de lo que ocurra una vez que el sensor empiece a reportar datos.
de la navegación inercial se ve limitada, en última instancia, por la calidad del modelado y la compensación de los errores del sensor. Desde la deriva de sesgo hasta el desplazamiento aleatorio , una mitigación eficaz requiere una combinación de diseño de hardware, rutinas de calibración y corrección algorítmica en tiempo real.
La navegación inercial no se limita únicamente al hardware. El rendimiento del hardware establece el mínimo, pero el máximo lo determina la eficacia con la que se gestionan los errores.
Tabla de contenido
¿Por qué la compensación de errores es el verdadero cuello de botella en INS?
Los sistemas de navegación inercial no suelen fallar repentinamente; se degradan silenciosamente . Lo que comienza como un pequeño sesgo en el giroscopio o una ligera desviación en el acelerómetro se convierte lentamente en un error creciente en la actitud, la velocidad y la posición . He visto sistemas de navegación inercial pasar de una precisión inferior a un metro a ser inutilizables en cuestión de minutos , no porque los sensores estuvieran defectuosos, sino porque el error no se gestionó .
Independientemente de la precisión que su IMU proclame en teoría, un INS sin compensación siempre se desviará . Y en entornos sin GNSS , esa desviación se vuelve crucial. Una compensación eficaz no es una característica adicional, sino la base de un INS fiable .
Categorización de errores de INS: qué se puede modelar frente a qué no
Al trabajar con sistemas de navegación inercial, una de las primeras cosas que observo es el comportamiento de los errores a lo largo del tiempo. Algunos son predecibles, otros no. Y esa diferencia es fundamental para la compensación.
Errores sistemáticos: predecibles y corregibles
Estos son repetibles a través del tiempo y la temperatura si no se corrigen:
- Deriva de sesgo en giroscopios y acelerómetros
- No linealidad del factor de escala
- Ligeras desalineaciones entre los ejes del sensor
- Sensibilidad térmica que cambia la salida dependiendo del entorno.
Con una rutina de calibración sólida, estos errores generalmente se pueden medir una vez y compensar de manera consistente, siempre y cuando las condiciones se mantengan dentro de los límites.
Errores aleatorios: impredecibles, pero caracterizables
Luego están los errores que no se pueden eliminar, solo modelar. Estos incluyen:
- Paseo aleatorio angular (ARW)
- Caminata aleatoria de velocidad (VRW)
- Ruido blanco del sensor
- Artefactos inducidos por vibración, especialmente en plataformas móviles
Conclusión: Los errores sistemáticos se resuelven en el laboratorio. Los errores aleatorios se combaten en el campo.
¿Cómo se propagan los errores INS a lo largo del tiempo?
Antes de hablar de compensación, es fundamental comprender cómo se comportan los errores dentro de un INS. No aparecen por sí solos, sino que crecen, se acumulan e interactúan con la dinámica del sistema de maneras que a menudo se subestiman. Analicemos cómo se desarrolla esto.
Los pequeños errores no permanecen pequeños.
En un sistema de navegación inercial, incluso un ligero sesgo en el giroscopio o un error de aceleración de micro-g aumentará con el tiempo. Esto se debe a que el INS funciona integrando datos de sensores, lo que significa que cualquier error se agrava en cada paso.
La integración es un multiplicador.
Una desviación de la orientación afecta la velocidad. Un error de velocidad, a su vez, afecta la posición. Esta reacción en cadena explica por qué un sistema con especificaciones aparentemente buenas en teoría puede desviarse cientos de metros después de 30 minutos sin señal GNSS.
El perfil de movimiento importa. Y mucho.
La forma en que se mueve el sistema influirá en los errores predominantes. En plataformas estáticas, predominan el sesgo a largo plazo y la deriva térmica. En sistemas altamente dinámicos, como drones, misiles o rovers rápidos, la no linealidad del factor de escala y el retardo temporal son más críticos que el propio sesgo.
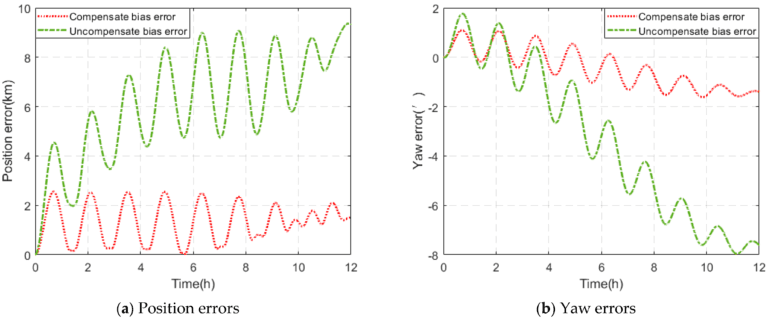
Las misiones largas lo amplifican todo.
Ya sea que se trate de una ruta de estudio de 12 horas o de un vuelo de misil de 2 minutos, cuanto más tiempo funcione su INS sin correcciones, más importante será su modelado de errores.
Modelado de errores de sensores para una compensación efectiva
Antes de corregir cualquier cosa en un INS, es necesario comprender qué se está corrigiendo. El sesgo, la deriva y el ruido de un sensor no son errores, sino comportamientos. Y, a menos que los modele correctamente, su estrategia de compensación será solo una conjetura.
Normalmente me baso en cuatro métodos de modelado clave. Cada uno se centra en diferentes tipos de errores y, en conjunto, ofrecen una visión clara de cómo se comportará el sistema, no solo en el laboratorio, sino también en la práctica.
| Método de modelado | Propósito principal | Tipos de errores abordados | Por qué es importante |
|---|---|---|---|
| Varianza de Allan | Analizar cómo evoluciona el ruido del sensor a lo largo del tiempo | ARW, inestabilidad de sesgo, deriva aleatoria | Esencial para el ajuste de filtros y la clasificación de sensores. |
| Calibración de seis posiciones | Estimar sesgos y desalineaciones fijos | Sesgo, factor de escala, desalineación del eje | Permite la eliminación precisa de errores estáticos |
| Calibración térmica | Variación de la salida del mapa a través de las temperaturas | Sesgo inducido por la temperatura y deriva de ganancia | Fundamental para plataformas móviles y al aire libre del mundo real |
| Análisis PSD | Comprender el ruido del sensor por frecuencia | Ruido blanco, oscilación de baja frecuencia | Informa el diseño del filtro sin suprimir el movimiento real |
Consejo: Combine al menos tres de estos métodos antes de confiar su INS en cualquier misión de larga duración o con GNSS denegado.
Técnicas de mitigación de errores basadas en hardware
Un buen software no puede salvar a un hardware defectuoso. En los sistemas de navegación inercial, las decisiones de diseño mecánico, térmico y eléctrico afectan directamente la estabilidad a largo plazo . Estas son las técnicas fundamentales en las que me baso para construir plataformas INS robustas.
- El aislamiento de vibraciones es esencial.
La vibración mecánica sin filtrar genera señales de movimiento falsas. El uso de aisladores sintonizados o soportes de sensor con la amortiguación adecuada puede reducir significativamente el ruido de alta frecuencia, especialmente en vehículos de orugas o helicópteros.
- La consistencia térmica mantiene válida la calibración.
La salida del sensor varía con la temperatura. El aislamiento pasivo o la calefacción activa pueden ayudar a mantener la temperatura de funcionamiento dentro del rango calibrado.
- El ruido de potencia se convierte en ruido de señal.
La ondulación de voltaje y la interferencia electromagnética (EMI) causan una corrupción sutil y persistente de las señales analógicas y digitales. Siempre utilizo líneas de alimentación limpias, reguladores de bajo ruido y una estricta separación analógica/digital.
- La precisión de montaje afecta la alineación.
Incluso pequeños cambios mecánicos pueden provocar errores significativos en la actitud y la velocidad. Utilice soportes rígidos mecanizados y controle cuidadosamente la orientación y el par de la IMU.
- Utilice sensores que coincidan con la misión.
No se limite a elegir el "mejor" sensor; elija uno que se ajuste a su presupuesto de errores. Para interrupciones prolongadas del GNSS, la estabilidad del sesgo es fundamental. Para plataformas rápidas, priorizan un bajo ARW y ancho de banda.
En resumen: el mejor rendimiento inercial comienza mucho antes de la recopilación de datos: comienza con la forma en que se atornilla el sensor al marco.
Técnicas de compensación basadas en software
Una vez que el hardware es estable, el software asume el control. Aquí es donde se produce la mayor parte del control de la deriva , y también donde un buen modelo puede lograr que un sensor modesto funcione como uno excelente. Así es como lo abordo en la práctica:
- Comience con una calibración adecuada.
Utilice procedimientos estáticos y dinámicos para medir el sesgo, el factor de escala, la desalineación y la respuesta térmica. Sin una buena línea base de calibración, todo lo demás son conjeturas.
- Utilice filtros que coincidan con su dinámica.
Filtros Kalman Extendidos (EKF), Filtros Kalman Sin Aroma (UKF) o filtros complementarios: elija según su perfil de movimiento y las fuentes de ayuda disponibles. Una estructura de filtro incorrecta es peor que no tener ningún filtro.
- La compensación de temperatura no es negociable.
Ya sea que utilice una IMU FOG o MEMS, el comportamiento del sensor cambia con la temperatura. La corrección en tiempo real mediante sensores de temperatura internos o externos puede reducir la deriva en un orden de magnitud.
- El filtrado adaptativo mejora la capacidad de supervivencia.
En misiones multifase (p. ej., lanzamiento, crucero, descenso), las características del ruido del sensor cambian. El ajuste del filtro adaptativo, basado en la velocidad, la vibración o los datos ambientales, permite que el sistema se ajuste según sea necesario.
- La corrección de circuito cerrado mantiene las cosas limitadas.
Utilice actualizaciones de GNSS, odometría, barómetro o magnetómetro para limitar el crecimiento de errores. Incluso una corrección de baja frecuencia cada pocos segundos mejora drásticamente el rendimiento en tareas de larga duración.
Lo más importante: El software no puede inventar la precisión, pero puede protegerla , optimizarla y recuperarla cuando algo falla. Y eso es precisamente lo que un buen INS debe hacer.
El papel de la fusión de sensores en la supresión de la deriva del INS
Incluso el mejor sistema de navegación inercial se desvía; no es un defecto, es física . La verdadera pregunta es cómo limitar esa desviación utilizando otros sensores. Ahí es donde la fusión de sensores se convierte en la herramienta más poderosa del sistema.
GNSS + INS: La solución clásica
Cuando el GNSS está disponible, incluso de manera intermitente, proporciona actualizaciones de posición absoluta para limitar la deriva del INS.
Ideal para: misiones de larga duración, mapeo móvil, UAVs
Ventaja: correcciones precisas, filtros maduros (EKF)
Advertencia: vulnerable a interferencias, pérdida de señal y trayectos múltiples
Híbrido FOG + MEMS: Equilibrio entre precisión y coste
La combinación de un FOG estable con un MEMS sensible le brinda lo mejor de ambos mundos: baja deriva y reacción rápida.
Ideal para: vehículos aéreos no tripulados de tamaño mediano, plataformas navales y sistemas robóticos.
Ventaja: mejor ARW + menor SWaP
Advertencia: requiere una integración cuidadosa y una calibración cruzada
Visión / LiDAR + INS: Continuidad sin GNSS
La odometría visual o LiDAR SLAM pueden proporcionar datos de posición relativa cuando el GNSS no está disponible, como en interiores o bajo tierra.
Ideal para: vehículos autónomos, túneles, almacenes, minas.
Ventaja: totalmente autónomo
Advertencia: se necesita línea de visión y es sensible a la iluminación o la densidad de características.
La sincronización lo es todo. Fusion solo funciona si los sensores están sincronizados. Las marcas de tiempo desalineadas causan más daño que beneficio.
En la práctica: Fusion no consiste en añadir más sensores, sino en saber en cuál confiar en el momento adecuado.
El enfoque de GuideNav para la confiabilidad del INS
Después de todo lo que he visto en el campo (en vehículos aéreos no tripulados, vehículos de reconocimiento, sistemas marinos), hay algo que sigue siendo cierto: el rendimiento real de un INS proviene de todo lo que rodea al sensor .
En GuideNav, ahí es exactamente donde nos centramos.
- Cada unidad está completamente calibrada en cuanto a temperatura y ejes , no solo probada por lotes.
- Proporcionamos datos reales de varianza de Allan y soporte para ajuste de filtros, no solo hojas de especificaciones.
- Nuestros modelos FOG y MEMS vienen con herramientas de integración listas para usar en campo : sincronización estable, interfaces limpias y soporte para fusión.
- Y como no estamos sujetos a ITAR , nuestros sistemas están listos para su implementación global en programas de defensa, industriales o de investigación.
No solo obtienes un sensor, sino una plataforma de navegación en la que puedes confiar cuando otros sistemas fallan.