En mi experiencia diseñando sistemas inerciales para operaciones de campo, los ingenieros suelen pasar por alto una cifra aparentemente simple: el recorrido aleatorio angular. No es tan llamativo como la estabilidad de sesgo o el ancho de banda, pero define el límite real de la fiabilidad del sistema, especialmente cuando falla el GNSS. El recorrido aleatorio angular no es un error que se pueda calibrar. Es el ruido que crece segundo a segundo. Una vez que se comprende su funcionamiento, cambia la forma de evaluar cada IMU en el banco de pruebas.
ARW no es una especificación, sino un reloj. Desde el momento en que se inicia la IMU, indica la velocidad a la que se degrada la confianza en la orientación. Cuanto más bajo sea, más tiempo se mantendrá el sistema correcto.
A lo largo de los años, he visto a equipos seleccionar IMU basándose en especificaciones de sesgo y gráficos de ancho de banda, solo para encontrarse con una desviación que desafía la simulación. Esa desviación a menudo no se debe a lo que pasaron por alto, sino a lo que no consideraron lo suficiente: el ARW. Una vez que te das cuenta de que el ARW define tu horizonte de ruido, empiezas a leer las hojas de datos de forma diferente. Dejas de preguntarte "¿Cuál es la precisión?" y empiezas a preguntarte "¿Cuánto tiempo puedo confiar en esto antes de que la incertidumbre se apodere de ti?".
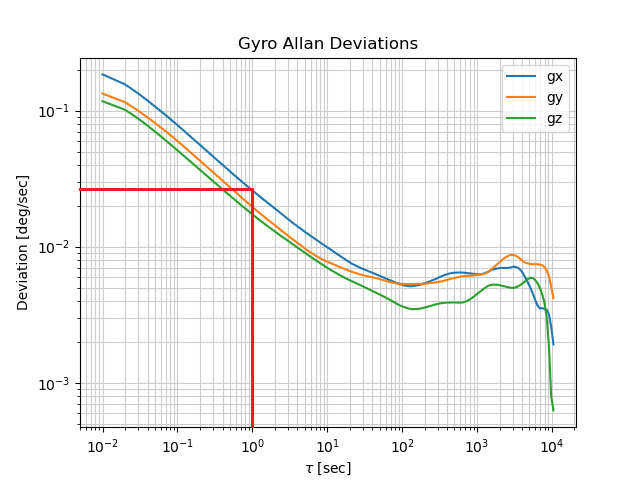
Tabla de contenido
¿Qué es exactamente el recorrido aleatorio angular (ARW)?
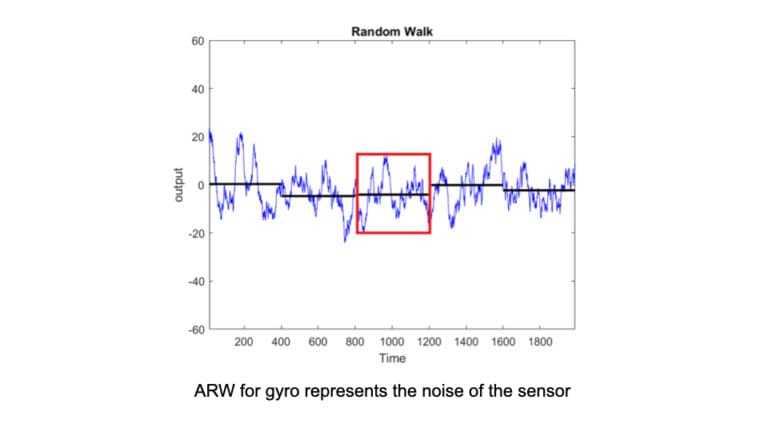
En términos sencillos, el recorrido aleatorio angular (ARW) es el ruido que acumula el giroscopio al empezar a integrar la velocidad angular. Pero seamos claros: no se trata de un error de medición ni de una desviación de sesgo. El ARW es el crecimiento de la incertidumbre, equivalente a la raíz cuadrada del tiempo , que surge del ruido blanco en la trayectoria de la señal del giroscopio. No se puede calibrar ni esperar a que se estabilice ; siempre está ahí, sonando en segundo plano.
A menudo describo el ARW a los ingenieros jóvenes como la "línea base borrosa" de su estimación de orientación . No le importa si la plataforma está en movimiento o quieta. Incluso en un laboratorio , con un sensor firme atornillado a la mesa, el ARW se suma. Eso es lo que lo hace tan fundamental. No es un fallo de rendimiento, es física.
¿Cómo se mide el ARW en la práctica?
El estándar de oro para medir ARW es el análisis de varianza de Allan.
Esta técnica descompone diferentes tipos de ruido en intervalos de tiempo variables. Con promedios cortos, el ARW se revela como una pendiente característica de -½ en un gráfico de desviación de Allan logarítmica. Es la señal de ruido blanco en la salida del giróscopo y establece el límite para la precisión de la actitud.
Pero no puedes confiar únicamente en la hoja de datos.
En mi flujo de trabajo, siempre realizo pruebas estáticas controladas en una plataforma mecánicamente aislada, registro los datos brutos del giroscopio y genero mis propios gráficos de Allan. Una pendiente limpia a corto plazo me indica que el giroscopio es estable. Si la pendiente es ruidosa o irregular, sé que lo que se anuncia como "0,05°/√h" podría no ser válido en la implementación.
ARW no es sólo un número: es un patrón que debería ver en datos reales.
Por eso considero ARW como algo para validar, no solo para citar. Si tu variación de Allan no concuerda con la especificación, todo tu conjunto de fusión podría sufrir las consecuencias más adelante.
¿Por qué es fundamental el ARW para la precisión de la IMU?
El ruido que nunca duerme
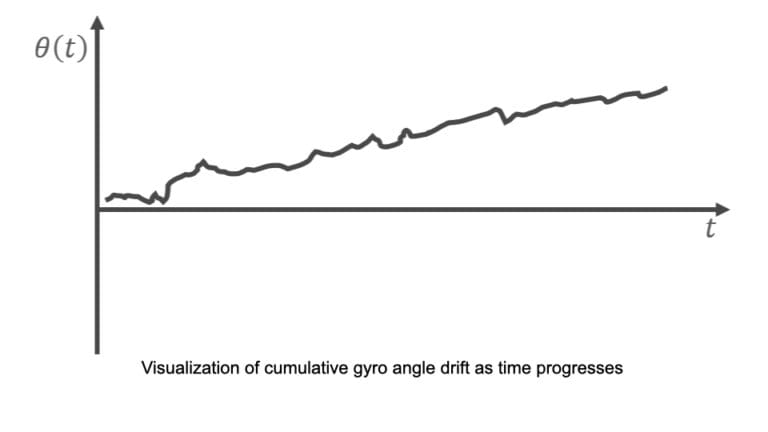
A diferencia de los errores deterministas, como el sesgo o el factor de escala, el ARW introduce incertidumbre continuamente en la estimación de la orientación. Dado que los giroscopios miden la velocidad angular y estas velocidades se integran con el tiempo , incluso pequeñas fluctuaciones aleatorias se combinan para generar una desviación angular significativa. No se necesitan minutos ni horas para notar su efecto: en plataformas de alta sensibilidad, el ARW comienza a degradar la precisión en segundos .
El techo invisible de la navegación
El ARW establece un límite estricto sobre el tiempo que la IMU puede proporcionar una orientación fiable cuando no se dispone de correcciones externas (como GNSS o magnetómetros). He visto filtros Kalman perfectamente ajustados perder gradualmente el rumbo simplemente porque el giroscopio subyacente tenía un ARW demasiado alto para la duración de la misión . Esto no es un problema de software, sino una restricción física. En todos los sistemas inerciales que he diseñado, una vez que conozco el ARW, puedo predecir cuándo fallará la navegación. Y eso es muy efectivo.
¿En qué se diferencia ARW de la inestabilidad de sesgo?
| Paseo aleatorio en ángulo (ARW) | Inestabilidad del sesgo |
|---|---|
| Ruido de corta duración. Aparece instantáneamente en la salida del giroscopio como pequeñas fluctuaciones aleatorias. | Deriva a mediano y largo plazo. Una lenta fluctuación del nivel de tasa cero a lo largo del tiempo. |
| Aumenta con el tiempo. Provoca que el error de orientación se acumule continuamente. | Tiene una meseta plana en los gráficos de varianza de Allan: es la “joroba” que buscan los ingenieros. |
| Impredecible, pero acotado. Se puede modelar estadísticamente, pero no eliminar. | Varía lentamente. A menudo se modela y se compensa parcialmente con filtros. |
| Domina la precisión de corta duración. Especialmente crítico en sistemas dinámicos y de rápido movimiento. | Domina la precisión a largo plazo. Es importante en aplicaciones como el INS de nivel topográfico o la navegación de larga duración. |
¿Por qué la confusión?
Tanto la ARW como la inestabilidad de polarización causan deriva, pero de diferentes maneras y en diferentes escalas de tiempo. Los ingenieros que se inician en sistemas inerciales suelen confundirlos , pensando que la deriva de polarización es la única fuente de error de navegación. En mi experiencia, suele ser la ARW la que limita el rendimiento en misiones tácticas , especialmente cuando el tiempo de operación sin GNSS se mide en minutos, no en horas.
¿Cuáles son los valores ARW típicos para diferentes IMU?
En proyectos reales, rara vez pregunto "¿cuál es la mejor IMU ?". Pregunto: "¿cuál es el ARW más bajo que puedo obtener con este tamaño, peso y presupuesto?". ARW es a menudo la especificación que le indica silenciosamente si un sensor es de grado de consumo, grado táctico o estratégico.
Así es como he visto que ARW se descompone en las diferentes clases de sensores:
| Clase IMU | ARW típico (°/√h) | Donde pertenece |
|---|---|---|
| MEMS de consumo | 1 – 10 | Teléfonos, wearables y robótica de nivel básico |
| MEMS industriales | 0.1 – 1 | Drones con GNSS, plataformas autónomas ligeras |
| MEMS tácticos | 0.05 – 0.1 | UAVs de defensa, estabilización de armas, vehículos |
| FOG de grado de navegación | 0.001 – 0.01 | Vehículos aéreos no tripulados (UAV) marítimos, aeroespaciales, ferroviarios y de larga duración |
| RLG estratégico | < 0.001 | Submarinos, misiles balísticos intercontinentales, sistemas militares de alta seguridad |
Trato a ARW como un filtro de corte en las decisiones de diseño.
Si mi sistema necesita sobrevivir 30 minutos sin GNSS y mantener una precisión de rumbo de 1°, las unidades MEMS con 0,2°/√h simplemente no serán suficientes. Las unidades MEMS tácticas apenas podrían funcionar. Si necesito un rendimiento superior, es FOG o nada.
¿Qué viene después?
A estas alturas, ya deberías tener una comprensión clara de qué es el ARW, cómo se mide y por qué es importante. Pero la teoría es solo la mitad de la ecuación. En la segunda parte de esta serie, explicaré cómo se manifiesta el ARW en sistemas reales —desde la deriva de UAV hasta misiones exclusivamente inerciales— y cómo ingenieros como nosotros diseñamos considerando este problema. Analizaremos aspectos tácticos: limitaciones del software, aislamiento mecánico, estrategias de fusión y umbrales estrictos de ARW para aplicaciones críticas.
→ Continuar a la Parte 2: Diseño con ARW en mente
