Tabla de contenido
- ¿Qué es una IMU?
- Componentes de una unidad de medida inercial
- ¿Cómo funciona la unidad de medida inercial?
- Vehículos autónomos y sin conductor
- Aeroespacial y Aviación
- Robótica
- Realidad Virtual (VR) y Realidad Aumentada (AR)
- Dispositivos médicos
- Análisis deportivo y captura de movimiento
- Electrónica de Consumo
- MEMS IMU vs FOG IMU: diferencias clave
- MEMS IMU: descripción general y características
- FOG IMU: descripción general y características
- Indicadores de rendimiento de la IMU
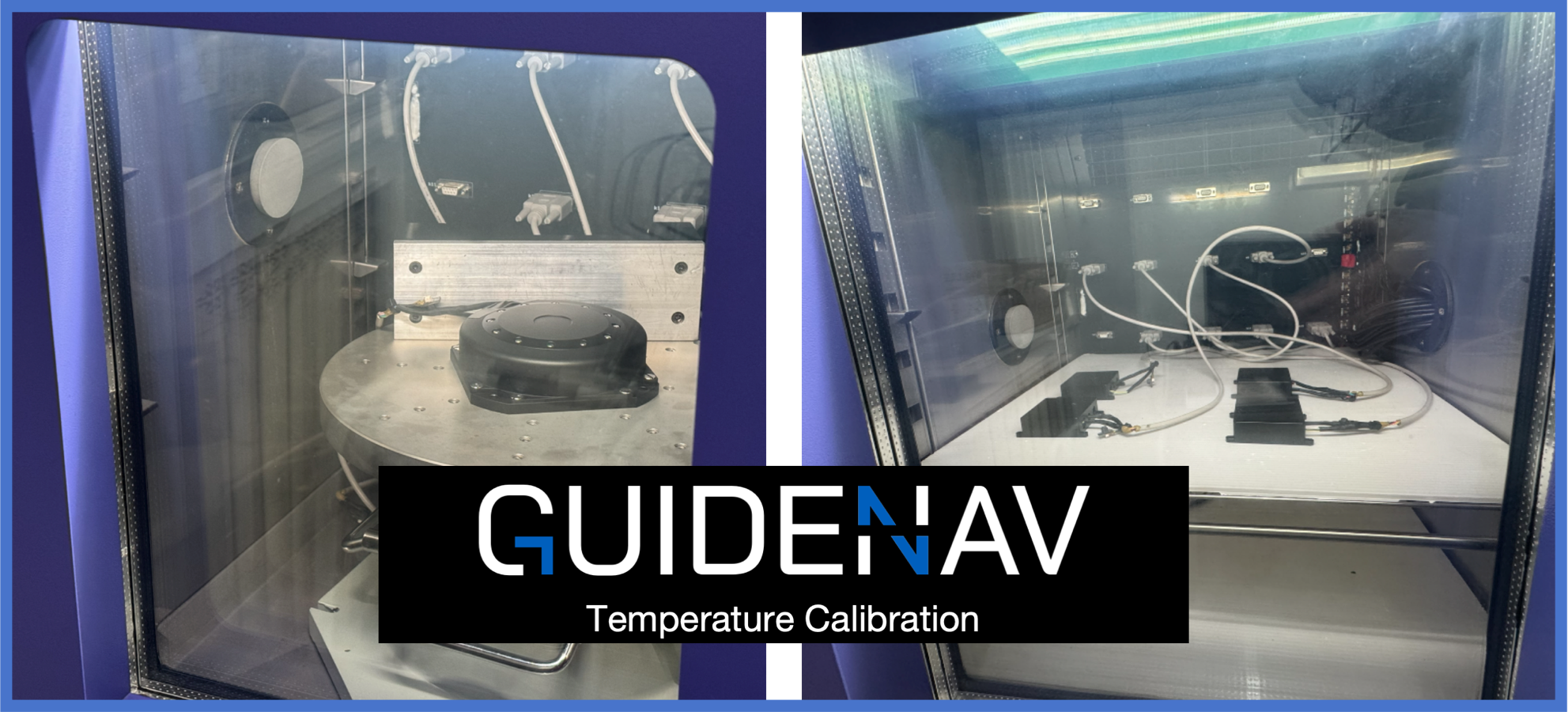
- Métodos de calibración de IMU
- Ventajas de las unidades de medida inercial
- Limitaciones de las unidades de medida inercial
- IMU vs AHRS (Sistema de referencia de actitud y rumbo)
- IMU vs INS (sistema de navegación inercial)
- Diferentes tipos de IMU y su descripción general del mercado
- Tendencias futuras y desarrollo de la unidad de medida inercial
Introducción
Las unidades de medición inercial (IMU) son cruciales en las industrias de alta tecnología actuales, incluidos los vehículos autónomos, la robótica y la aeroespacial. Sin embargo, a pesar de su uso generalizado, muchos todavía luchan por comprender completamente cómo funcionan las IMU y su potencial. Sin este conocimiento, existe el riesgo de que se produzcan ineficiencias y errores en el rendimiento del sistema. En este artículo, exploraremos los conceptos básicos de las IMU, sus aplicaciones y las tendencias futuras, para asegurarnos de que aproveche al máximo esta tecnología.
Una unidad de medición inercial (IMU) es un dispositivo que mide la aceleración, la velocidad angular y, a veces, los campos magnéticos para determinar la orientación y posición de un objeto. Las IMU son esenciales en navegación, sistemas de control y seguimiento de movimiento. Al combinar datos de sensores, las IMU permiten un seguimiento preciso del movimiento y la orientación en entornos donde las señales de GPS pueden ser débiles o no estar disponibles.
El futuro de las IMU es apasionante, y tendencias como la fusión de sensores y la integración de la IA abren nuevas posibilidades. Profundicemos en cómo funcionan estos sistemas y qué depara el futuro para su papel en las tecnologías de vanguardia.
Los fundamentos de la unidad de medida inercial (IMU)
Componentes de una unidad de medida inercial
Una IMU normalmente incluye los siguientes sensores clave. Analicémoslos y veamos cómo cada uno contribuye a la funcionalidad general:
| Componente | Función | Producción |
|---|---|---|
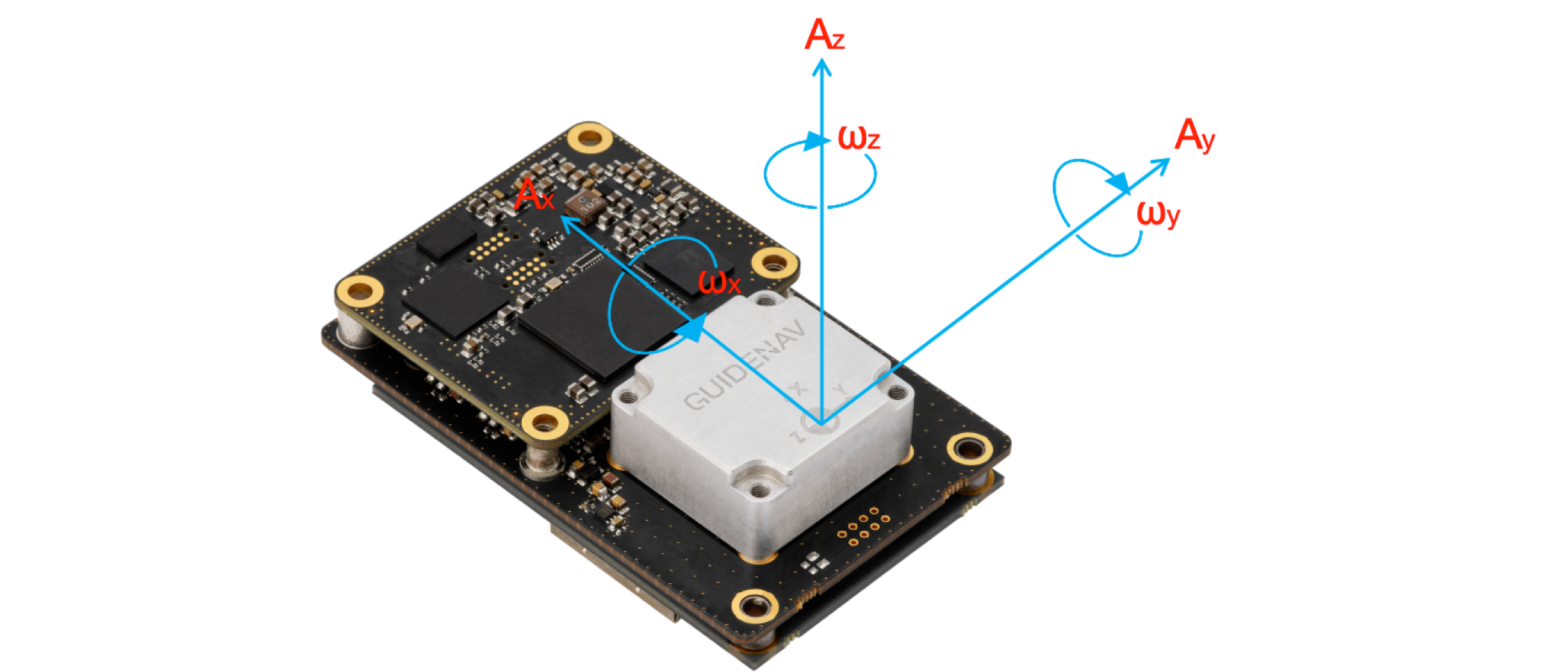
| Acelerómetro | Mide la aceleración lineal a lo largo de los ejes X, Y y Z. | Proporciona datos sobre velocidad y desplazamiento. |
| Giroscopio | Mide la velocidad angular (velocidad de rotación) alrededor de los ejes X, Y y Z. | Proporciona datos sobre orientación (actitud). |
| Magnetómetro (opcional) | Mide la intensidad y la dirección del campo magnético en relación con el campo magnético de la Tierra. | Proporciona rumbo (dirección de la brújula). |
Cada uno de estos sensores juega un papel crucial al proporcionar datos de movimiento en tiempo real, lo que nos ayuda a comprender cómo el objeto se mueve y gira en el espacio.
¿Cómo funciona la unidad de medida inercial?
Así es como nosotros, en GuideNav , diseñamos IMU para que funcionen a la perfección:
- Medición de aceleración : el acelerómetro detecta cambios en la velocidad a lo largo de tres ejes. Estos datos nos permiten determinar qué tan rápido se acelera o desacelera el objeto, lo cual es fundamental para rastrear el desplazamiento a lo largo del tiempo.
- Medición de velocidad angular : el giroscopio rastrea cuánto gira el objeto alrededor de cada uno de los tres ejes. Al integrar estos datos de rotación a lo largo del tiempo, la IMU puede indicarnos la orientación precisa del objeto en el espacio.
- Medición del campo magnético (opcional) : si se incluye, el magnetómetro mide el campo magnético de la Tierra y proporciona el rumbo de la brújula. Esto ayuda a corregir cualquier desviación en las lecturas del giroscopio, asegurando que la IMU siga siendo precisa durante largos períodos.
En GuideNav , utilizamos algoritmos de fusión de sensores para combinar datos de estos componentes. Al hacerlo, creamos una representación muy precisa de la posición y orientación del objeto en el espacio 3D.
Aplicaciones de las unidades de medida inercial (IMU)
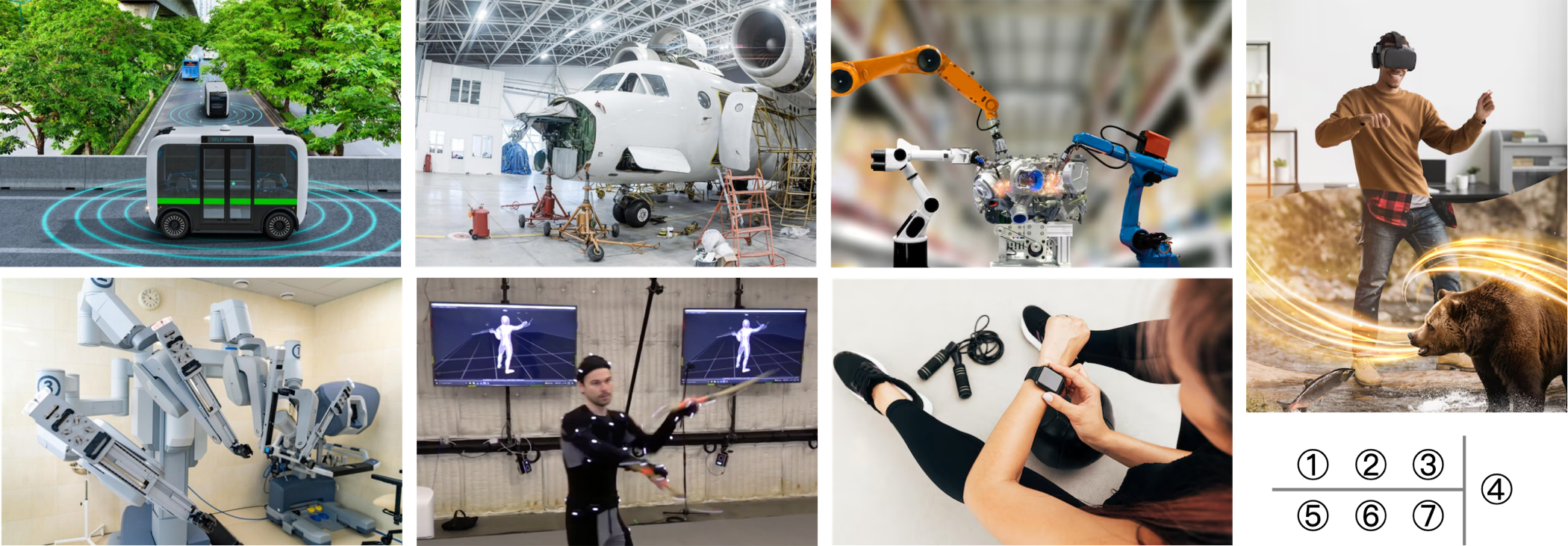
Las unidades de medición inercial (IMU) se utilizan en una amplia gama de aplicaciones y proporcionan datos esenciales sobre aceleración, velocidad angular y, a veces, campos magnéticos. Su precisión y versatilidad los hacen cruciales en industrias como la de vehículos autónomos, aeroespacial, robótica, realidad virtual, atención médica, análisis deportivo y electrónica de consumo. A continuación, exploraremos algunas de las aplicaciones clave en las que las IMU son indispensables.
1. Vehículos autónomos y de conducción autónoma
Las IMU son fundamentales en el desarrollo y operación de vehículos autónomos . Ayudan a rastrear el movimiento y la orientación del vehículo en tiempo real, garantizando estabilidad y navegación precisa. Si bien del Sistema de Posicionamiento Global (GPS) se utilizan a menudo para el posicionamiento, las IMU son esenciales cuando las señales de GPS son débiles o no están disponibles (por ejemplo, en túneles, cañones urbanos o áreas remotas).
| Solicitud | Papel de la IMU |
|---|---|
| Coches Autónomos | Proporciona datos sobre la orientación y el movimiento del vehículo para permitir una navegación estable. |
| Drones | Garantiza un control preciso de la trayectoria y la posición del vuelo. |
| Vehículos robóticos | Realiza un seguimiento del movimiento en entornos todoterreno o sin GPS. |
2. Aeroespacial y Aviación
Las IMU han sido durante mucho tiempo parte integral de las aeroespacial y de aviación . Proporcionan datos en tiempo real sobre la orientación y el movimiento de aviones y naves espaciales. Las IMU se utilizan tanto en la aviación comercial como en la exploración espacial y ofrecen alta confiabilidad y precisión en entornos desafiantes donde el GPS puede no estar disponible o no ser práctico.
| Solicitud | Papel de la IMU |
|---|---|
| Navegación de aeronaves | Proporciona datos de actitud (orientación) para un vuelo estable. |
| Navegación de naves espaciales | Garantiza una orientación precisa y un control del movimiento en el espacio. |
| Orientación satelital | Mantiene la orientación y trayectoria del satélite durante la operación. |
3. Robótica
En robótica , las IMU se utilizan para monitorear el movimiento, la orientación y el equilibrio de los robots, ya sea en aplicaciones industriales, médicas o de consumo. Las IMU brindan retroalimentación a los sistemas de control de robots, lo que garantiza un movimiento suave y preciso en una variedad de entornos.
| Solicitud | Papel de la IMU |
|---|---|
| Robots Industriales | Garantiza un movimiento estable durante las tareas de fabricación. |
| Robots médicos | Proporciona un control preciso del movimiento para cirugías y rehabilitación. |
| Robots Autónomos | Realiza un seguimiento de la posición y orientación para la navegación en entornos dinámicos. |
4. Realidad virtual (VR) y realidad aumentada (AR)
En el mundo de la Realidad Virtual (VR) y la Realidad Aumentada (AR) , las IMU son componentes clave para rastrear los movimientos de la cabeza y el cuerpo de los usuarios. Al medir la rotación, la aceleración y, a veces, los campos magnéticos, las IMU proporcionan datos de movimiento en tiempo real que mejoran la experiencia de inmersión.
| Solicitud | Papel de la IMU |
|---|---|
| Auriculares de realidad virtual | Sigue los movimientos de la cabeza para ajustar el entorno virtual. |
| Dispositivos de RA | Supervisa los movimientos de las manos para interactuar con objetos virtuales. |
| Control de gestos | Reconoce los gestos del usuario para la interacción dentro de los sistemas AR/VR. |
5. Dispositivos médicos
Las IMU se integran cada vez más en dispositivos médicos para diversos fines, incluido el seguimiento del movimiento, la rehabilitación y el diagnóstico. Su capacidad para medir movimientos precisos los hace invaluables para comprender y monitorear el progreso del paciente.
| Solicitud | Papel de la IMU |
|---|---|
| Rehabilitación Física | Supervisa los movimientos de los pacientes durante la terapia para seguir el progreso. |
| Dispositivos portátiles | Realiza un seguimiento de los trastornos del movimiento, como en pacientes con la enfermedad de Parkinson. |
| Captura de movimiento para diagnóstico | Mide movimientos anormales con fines de diagnóstico. |
6. Análisis deportivo y captura de movimiento
Las IMU se utilizan ampliamente en análisis deportivos y captura de movimiento para monitorear el rendimiento de los atletas y optimizar sus movimientos. El seguimiento preciso del movimiento proporcionado por las IMU ayuda a prevenir lesiones, analizar y mejorar el rendimiento.
| Solicitud | Papel de la IMU |
|---|---|
| Rendimiento del atleta | Realiza un seguimiento de los datos de movimiento para analizar la velocidad, la aceleración y la eficiencia. |
| Prevención de lesiones | Monitoriza los movimientos para identificar riesgos y optimizar el entrenamiento. |
| Captura de movimiento | Captura el movimiento humano para su uso en películas, animación y juegos. |
7. Electrónica de consumo
Las IMU también están integradas en muchos electrónicos de consumo , como teléfonos inteligentes, dispositivos portátiles y controladores de juegos. Estos dispositivos utilizan IMU para detectar movimiento y orientación, lo que permite diversas funciones y mejora la experiencia del usuario.
| Solicitud | Papel de la IMU |
|---|---|
| Teléfonos inteligentes | Permite la rotación de la pantalla, controles basados en movimiento y seguimiento de actividad. |
| Rastreadores de actividad física | Supervisa el recuento de pasos, la distancia y la actividad física. |
| Controladores de juegos | Realiza un seguimiento de los movimientos del jugador para disfrutar de experiencias de juego inmersivas. |
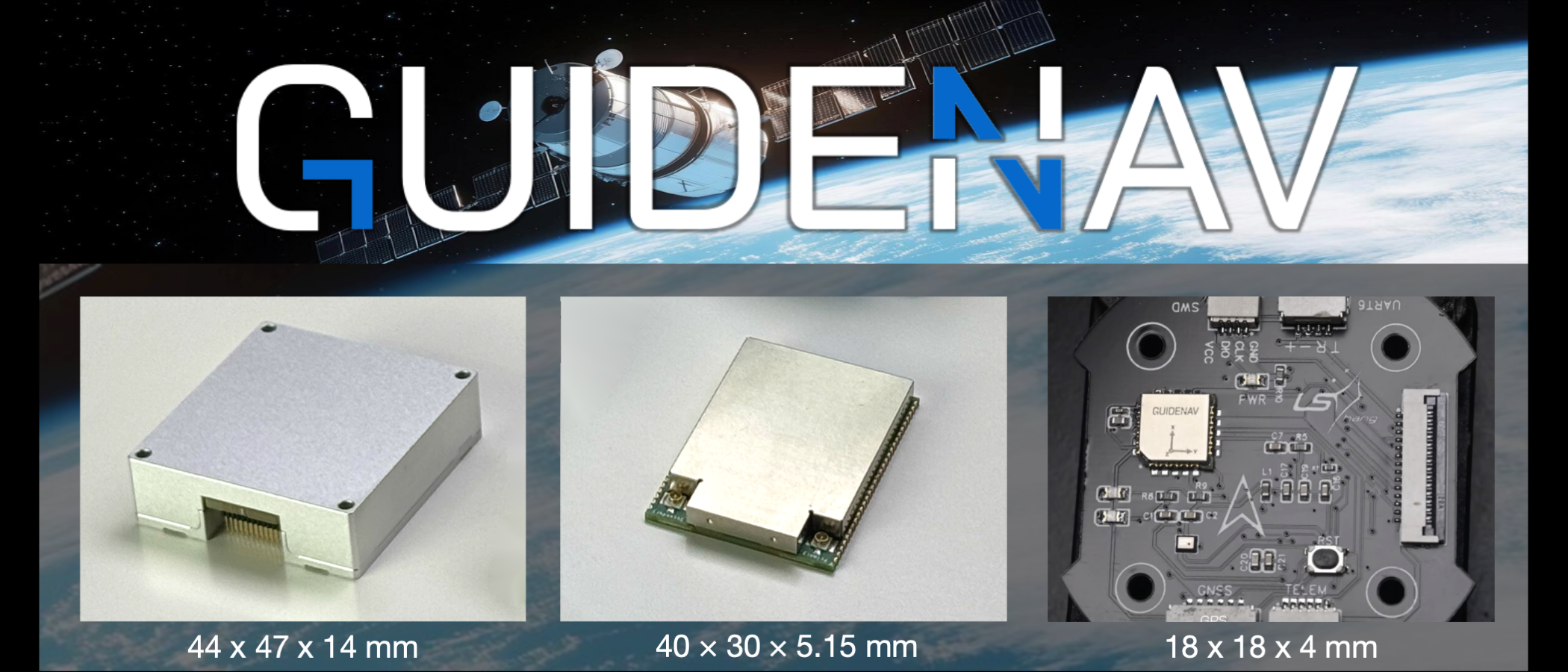
Tipos de unidades de medida inercial (IMU): MEMS IMU frente a FOG IMU
Las unidades de medición inercial (IMU) son esenciales en muchas industrias, particularmente en aplicaciones aeroespaciales y de defensa Los dos tipos principales de IMU, MEMS IMU (sistemas microelectromecánicos) y FOG IMU (IMU de giroscopio de fibra óptica) , difieren significativamente en términos de rendimiento, tamaño, costo e idoneidad para diferentes aplicaciones.
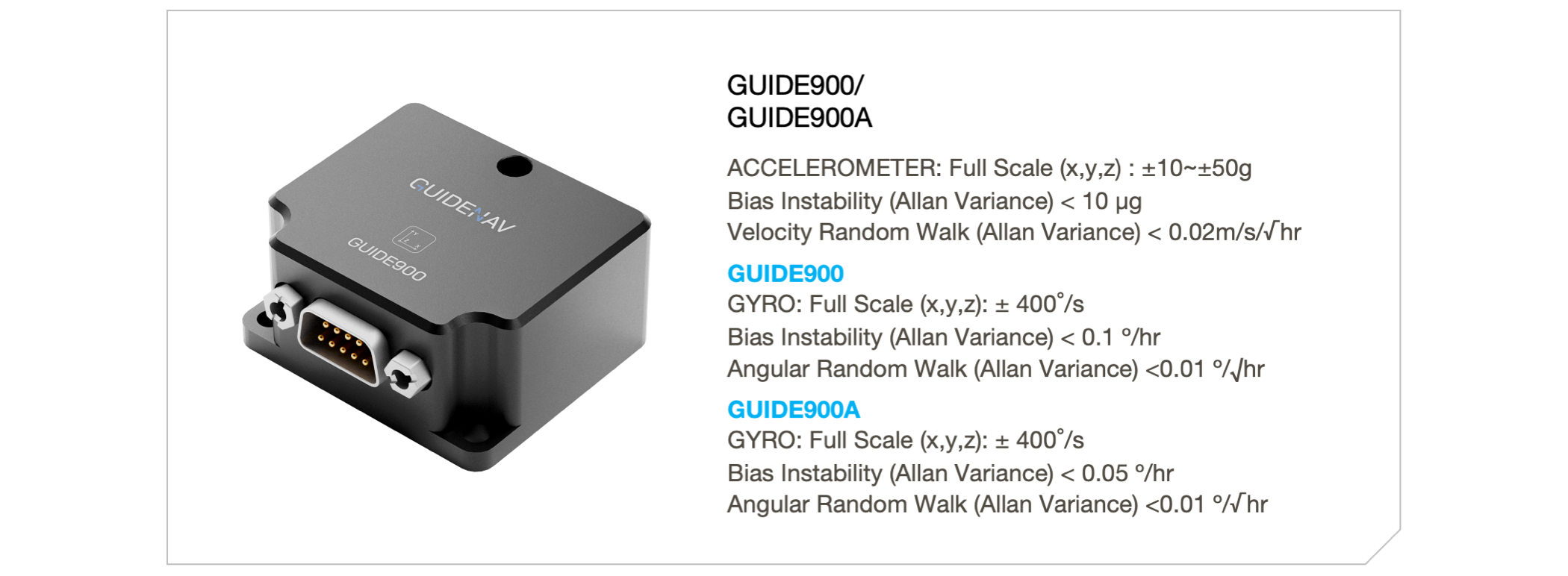
Aunque las IMU FOG se han utilizado tradicionalmente en áreas de alta precisión como la aeroespacial, la defensa y la robótica, los avances recientes en las IMU MEMS , como GUIDE900 y GUIDE900A , ahora ofrecen niveles de precisión de 0,1°/hr y 0,05°/hr , que son las IMU FOG de nivel básico . Esta mejora permite que las IMU MEMS se utilicen en aplicaciones de alta precisión que anteriormente estaban dominadas por las IMU FOG .
MEMS IMU vs FOG IMU: diferencias clave
| Parámetro | MEMS IMU | IMU DE NIEBLA |
|---|---|---|
| Tecnología | Basado en Sistemas Micro-Electro-Mecánicos (MEMS) . | Utiliza giroscopios de fibra óptica (FOG) para medir la velocidad angular. |
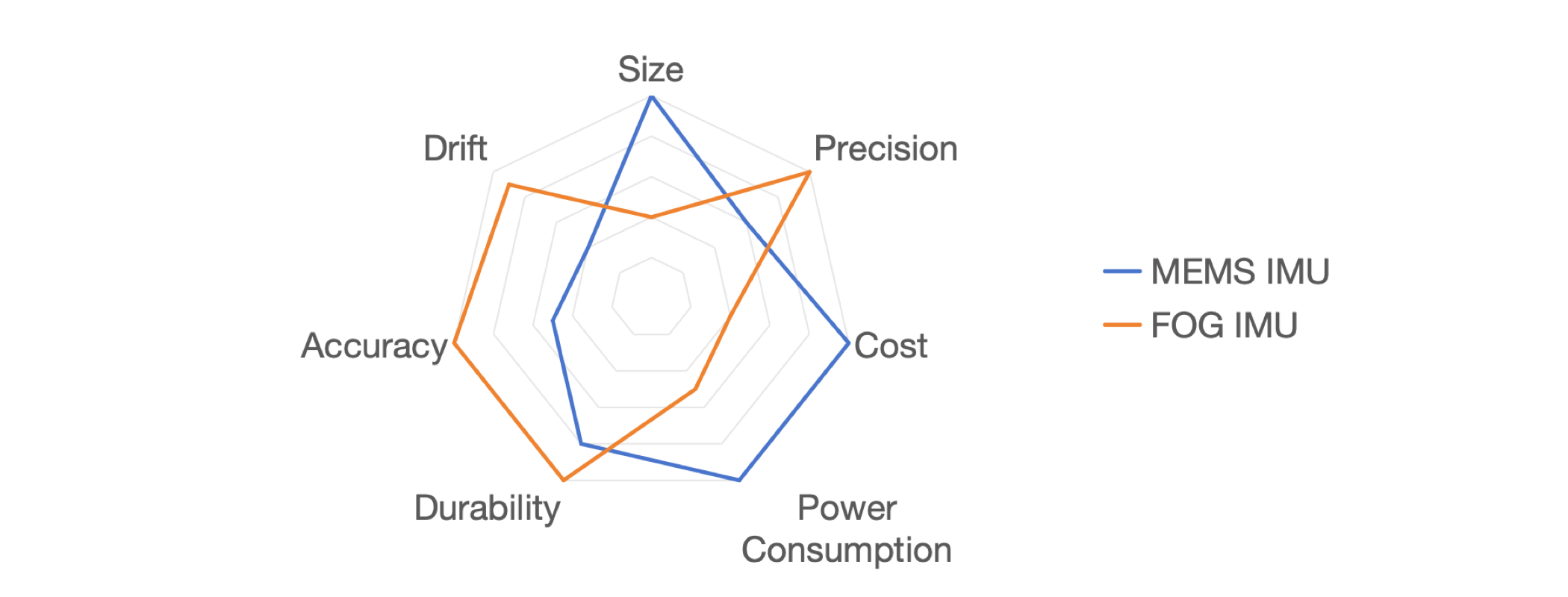
| Tamaño | Compacto y liviano , ideal para dispositivos portátiles. | Más grande, más robusto, adecuado para aplicaciones de precisión en sistemas a gran escala. |
| Precisión | Precisión moderada, pero las IMU MEMS más nuevas y de alta precisión pueden alcanzar 0,1°/h o 0,05°/h . | Precisión extremadamente alta, deriva mínima y más estable en el tiempo. |
| Costo | Bajo costo, lo que los hace ideales para aplicaciones del mercado masivo. | Mayor costo debido a la tecnología avanzada, utilizada en sistemas de alta gama. |
| Consumo de energía | Bajo consumo de energía , adecuado para dispositivos que funcionan con baterías. | Mayor consumo de energía, más adecuado para sistemas con mayores presupuestos de energía. |
| Durabilidad | Menos duradero en condiciones ambientales extremas. | Muy duradero, capaz de soportar entornos hostiles. |
| Exactitud | Adecuado para aplicaciones de precisión baja a media. | Alta precisión, adecuada para navegación y estabilidad de alta precisión. |
| Aplicaciones | Electrónica de consumo, sistemas automotrices, drones, vehículos aéreos no tripulados, **sistemas militares**. | Aeroespacial, defensa, robótica industrial, sistemas de navegación de alta gama. |
| Deriva | Mayor deriva con el tiempo, lo que requiere recalibración. | Deriva muy baja, ideal para funcionamiento a largo plazo sin recalibración. |
| Tiempo de respuesta | Respuesta más rápida debido a un tamaño más pequeño y un diseño más simple. | Respuesta ligeramente más lenta pero ofrece mayor estabilidad en el tiempo. |
MEMS IMU: descripción general y características
Las unidades de medición nerviosas MEMS I utilizan de sistemas microelectromecánicos (MEMS) , donde pequeños componentes mecánicos se integran con la electrónica en un microchip. Las principales ventajas de las IMU MEMS son su pequeño tamaño , bajo costo y bajo consumo de energía . Estas características hacen que las IMU MEMS ideales para aplicaciones en electrónica de consumo, sistemas automotrices y, cada vez más, también aplicaciones militares
En GuideNav , estamos particularmente orgullosos de nuestras IMU MEMS , como GUIDE900 y GUIDE900A , que brindan precisiones de 0,1°/h y 0,05°/h , respectivamente, lo que las hace adecuadas para algunas de alta precisión que tradicionalmente estaban dominadas. por FOG IMU .
Características clave de las IMU MEMS:
- Tamaño pequeño : perfecto para aplicaciones compactas, como teléfonos inteligentes , dispositivos portátiles y drones militares .
- Bajo costo : ideal para aplicaciones con grandes volúmenes, como sistemas automotrices , electrónica de consumo y sistemas de defensa que necesitan equilibrar el rendimiento con la asequibilidad.
- Precisión moderada : si bien las IMU MEMS tradicionalmente ofrecen una precisión menor que las IMU FOG , los modelos de alta precisión ahora cierran esta brecha para muchas aplicaciones de defensa.
- Bajo consumo de energía : Altamente eficiente para dispositivos que funcionan con baterías, crucial para drones militares , sistemas de armas inteligentes y otras tecnologías de defensa móvil.
Aplicaciones de las IMU MEMS:
- Defensa : Utilizado en drones militares , sistemas de navegación para vehículos blindados y sistemas de guía de misiles . Estas aplicaciones se benefician de la compacidad y el bajo costo de las IMU MEMS
- Electrónica de consumo : Se encuentra en teléfonos inteligentes , rastreadores de actividad física y controladores de juegos .
- Sistemas Automotrices : Utilizados en control de estabilidad del vehículo y navegación autónoma .
- Drones y UAV : Proporciona orientación y estabilización en drones militares y UAV de consumo .
FOG IMU: descripción general y características
Las IMU FOG utilizan giroscopios de fibra óptica (FOG) para medir la velocidad angular, lo que les permite proporcionar una precisión y estabilidad extremadamente altas. Esto hace que las IMU FOG sean ideales para aplicaciones que requieren una deriva mínima y confiabilidad a largo plazo, como navegación aeroespacial , guía de misiles y robótica de alta gama .
Si bien las IMU FOG son ampliamente consideradas por su precisión y durabilidad, las IMU MEMS están cerrando la brecha en el rendimiento, particularmente en aplicaciones militares donde el costo, el tamaño y el consumo de energía son consideraciones clave.
Características clave de las IMU FOG:
- Alta precisión : Las IMU FOG ofrecen una deriva extremadamente baja, lo que las hace ideales para aplicaciones de alta precisión, como navegación por satélite y sistemas de guía militar.
- Durabilidad : Con la capacidad de manejar condiciones ambientales extremas, las IMU FOG son ideales para aeroespaciales y militares que necesitan operar en entornos hostiles.
- Mayor consumo de energía : las IMU FOG generalmente consumen más energía, lo que las hace más adecuadas para sistemas con suficientes recursos energéticos.
- Tamaño más grande : Las IMU FOG son más voluminosas en comparación con las IMU MEMS , por lo que se utilizan en sistemas más grandes, como aviones y naves espaciales .
Aplicaciones de las IMU FOG:
- Aeroespacial : Se utiliza en aeronaves y navegación por satélite , donde la alta precisión y la estabilidad son fundamentales.
- Defensa : Ampliamente utilizado en guía de misiles , vehículos militares no tripulados y sistemas de navegación militar .
- Robótica de alta gama : Se utiliza en robótica industrial , robots quirúrgicos y sistemas de navegación autónomos donde son necesarias precisión y estabilidad a largo plazo.
Cuándo elegir MEMS IMU frente a FOG IMU
| Caso de uso | MEMS IMU | IMU DE NIEBLA |
|---|---|---|
| Electrónica de Consumo | Ideal para teléfonos inteligentes, dispositivos portátiles y rastreadores de actividad física. | No apto debido al alto coste y consumo de energía. |
| Aeroespacial y aviación | Adecuado para sistemas pequeños y de bajo costo con requisitos de precisión moderados. | Esencial para sistemas de navegación y orientación de alta precisión. |
| Vehículos Autónomos | Bueno para soluciones de menor costo con requisitos de rendimiento moderados. | Necesario para una navegación de alta precisión en entornos complejos. |
| Militar y Defensa | Se utiliza en **drones militares**, **sistemas de navegación** para **vehículos** y **sistemas de guía de misiles**. | Se utiliza ampliamente para guía de misiles, drones y navegación en condiciones difíciles. |
| Robótica | Adecuado para robots de consumo o proyectos educativos. | Preferido para robots industriales, robots quirúrgicos y otros sistemas basados en precisión. |
Rendimiento y calibración de la unidad de medida inercial (IMU)
El rendimiento de las unidades de medición inercial (IMU) puede verse influenciado por varios factores, como la deriva del sensor, la temperatura y las condiciones ambientales. Para garantizar un rendimiento óptimo, es esencial comprender los indicadores clave de rendimiento (KPI) de las IMU y los métodos de calibración utilizados para mejorar su precisión.
Indicadores de rendimiento de la IMU
El rendimiento de una Unidad de Medición Inercial (IMU) se evalúa en función de varios factores clave que influyen directamente en su precisión y confiabilidad. A continuación se detallan los indicadores de desempeño más importantes de las IMU:
| Indicador de desempeño | Descripción |
|---|---|
| Estabilidad del sesgo | La consistencia de las lecturas de la IMU a lo largo del tiempo. Una IMU estable tendrá una desviación mínima en las mediciones. |
| Factor de escala | La relación entre el movimiento físico real y la salida de la IMU. Cualquier error en esta relación puede dar lugar a una interpretación incorrecta de los datos. |
| Ruido | Variaciones aleatorias en las lecturas del sensor de la IMU. Los niveles de ruido bajos indican una mayor precisión en las mediciones. |
| Paseo aleatorio | Describe la deriva en las mediciones a lo largo del tiempo. Se refiere a cuánto se desvía la medición de su valor real debido al ruido aleatorio. |
| Resolución | El cambio más pequeño medible en las lecturas del sensor de la IMU. Una resolución más alta mejora la precisión de las mediciones. |
| No linealidad | La desviación de una relación lineal entre entrada y salida. Las no linealidades pueden causar errores a aceleraciones o velocidades angulares más altas. |
| Sensibilidad a la temperatura | La variación en las mediciones de IMU debido a cambios en la temperatura ambiente. Las IMU con baja sensibilidad a la temperatura son más precisas en condiciones ambientales fluctuantes. |
Métodos de calibración de IMU
La calibración es un proceso vital que ayuda a mejorar la precisión de una unidad de medición inercial (IMU) al corregir errores que pueden surgir debido a la deriva del sensor, la desalineación y otros factores. La calibración de la IMU normalmente implica tres sistemas de sensores principales: el acelerómetro , el giroscopio y el magnetómetro . Cada uno de estos sensores requiere técnicas de calibración específicas para garantizar mediciones precisas y confiables.
1. Calibración del acelerómetro
El acelerómetro de una IMU mide la aceleración lineal a lo largo de los ejes X, Y y Z. Sin embargo, a menudo está sujeto a errores como desviaciones del factor de escala, desalineaciones y falta de ortogonalidad de los ejes.
| Método de calibración | Descripción |
|---|---|
| Calibración estática | Un método común en el que la IMU se coloca en una orientación conocida (por ejemplo, plana sobre una superficie). Midiendo la aceleración de la gravedad (9,81 m/s²) se pueden corregir los errores del sensor. |
| Calibración dinámica | Implica mover la IMU a través de diferentes aceleraciones y direcciones conocidas para corregir errores de factor de escala, sesgos y desalineaciones entre los ejes. |
| Compensación de temperatura | Dado que los acelerómetros son sensibles a la temperatura, la calibración también incluye compensar las variaciones de temperatura que podrían causar errores de medición. |

2. Calibración del giroscopio
El giroscopio mide la velocidad angular alrededor de los ejes X, Y y Z de la IMU. Los giroscopios pueden sufrir deriva (donde las lecturas del sensor cambian lentamente con el tiempo) e inestabilidad de polarización (donde hay una desviación constante en las mediciones).
| Método de calibración | Descripción |
|---|---|
| Calibración de compensación de tasa cero | En este método, el giroscopio se coloca en una posición estacionaria (sin movimiento) y se mide y corrige el desplazamiento o desviación. |
| Calibración de la tabla de tasas | Esto implica rotar la IMU a diferentes velocidades angulares conocidas para determinar cualquier error de no linealidad o factor de escala. |
| Calibración de temperatura | Al igual que los acelerómetros, los giroscopios son sensibles a los cambios de temperatura. La calibración tiene en cuenta las variaciones en el comportamiento del sensor a diferentes temperaturas. |
La calibración del giroscopio garantiza que las lecturas de velocidad angular de la IMU sean precisas y estén libres de deriva, lo que mejora su rendimiento en entornos dinámicos.
3. Calibración del magnetómetro
El magnetómetro mide la fuerza y dirección del campo magnético de la Tierra, proporcionando datos de orientación que se utilizan para determinar el rumbo. Los magnetómetros pueden verse afectados por perturbaciones magnéticas locales, desalineación del sensor y errores en el factor de escala.
| Método de calibración | Descripción |
|---|---|
| Calibración de hierro duro | Este método compensa las distorsiones del campo magnético causadas por los propios componentes de la IMU (por ejemplo, dispositivos electrónicos). |
| Calibración de hierro dulce | Corrige las distorsiones causadas por el entorno o los materiales cercanos a la IMU. |
| Calibración multipunto | El magnetómetro está expuesto a una variedad de intensidades y direcciones de campos magnéticos conocidas para detectar y corregir errores. |
La calibración del magnetómetro es esencial para lograr datos precisos de rumbo y orientación, especialmente cuando la IMU se utiliza en entornos con condiciones magnéticas variables.
Ventajas y limitaciones de las unidades de medida inercial (IMU)
Las unidades de medición inercial ofrecen un rendimiento excepcional en tiempo real, independencia de los sistemas externos y son altamente adaptables en todas las industrias. es necesario tener en cuenta su deriva , sensibilidad ambiental y modelos de precisión de alto costo Las IMU MEMS logran un equilibrio entre costo y rendimiento para muchas aplicaciones industriales y de consumo, mientras que las IMU FOG son la opción preferida para tareas de alta precisión y larga duración Comprender las fortalezas y limitaciones de las IMU lo ayuda a seleccionar el mejor sistema para sus necesidades específicas.
Ventajas de las unidades de medida inercial
| Ventaja | Descripción |
|---|---|
| Alta precisión en entornos dinámicos | Las IMU proporcionan mediciones en tiempo real de aceleración y velocidad angular, esenciales para aplicaciones en vehículos autónomos , aeroespaciales y robótica , donde el GPS u otras referencias externas no están disponibles. |
| Independencia de señales externas | Las IMU funcionan sin depender de señales externas como el GPS , lo que las hace muy fiables en entornos como la navegación subterránea , la exploración espacial o la robótica interior . |
| Compacto y ligero | Las IMU MEMS son pequeñas y livianas, ideales para aplicaciones como dispositivos portátiles , drones y electrónica de consumo donde el espacio y el peso son críticos. |
| Bajo consumo de energía | Las IMU MEMS son energéticamente eficientes y perfectas para dispositivos que funcionan con baterías, como relojes inteligentes y rastreadores de actividad física , que necesitan funcionar durante períodos prolongados. |
| Procesamiento de datos en tiempo real | Las IMU entregan datos de alta frecuencia y baja latencia, lo que las hace adecuadas para el control en tiempo real en robótica , estabilización de drones y navegación de vehículos . |
| Durabilidad en entornos hostiles | Las IMU FOG IMU MEMS de alta gama pueden soportar condiciones extremas como altas vibraciones , variaciones de temperatura y golpes , lo que las hace ideales para aplicaciones militares y aeroespaciales |
Limitaciones de las unidades de medida inercial
| Limitación | Descripción |
|---|---|
| Deriva en el tiempo | Los giroscopios de las IMU acumulan deriva con el tiempo, lo que genera mediciones inexactas a menos que se recalibran periódicamente. Este es un problema importante en aplicaciones de larga duración. |
| Sensibilidad ambiental | Las IMU son sensibles a condiciones ambientales como la temperatura y las vibraciones , lo que puede introducir errores, especialmente en las IMU MEMS que son más propensas a estas perturbaciones. |
| Alto costo (para modelos de alta precisión) | Si bien las IMU MEMS son rentables, las IMU de alta precisión, como las IMU FOG, son costosas y pueden no ser adecuadas para todas las aplicaciones debido a su alto costo y consumo de energía. |
| Precisión a corto plazo versus estabilidad a largo plazo | Las IMU ofrecen una gran precisión a corto plazo , pero sin corrección externa (por ejemplo, GPS ), experimentan inestabilidad a largo plazo , un desafío para tareas de navegación de alta precisión durante períodos prolongados. |
| Complejidad en la fusión de datos | Las IMU a menudo requieren la fusión de sensores (p. ej., integración de GPS , magnetómetros ) para corregir errores con el tiempo, lo que agrega complejidad y carga computacional al sistema. |
| Precisión limitada en alta dinámica | En aplicaciones de alta dinámica , las IMU MEMS pueden no igualar la precisión de las IMU FOG , especialmente en aplicaciones como guía de misiles u orientación de naves espaciales , que requieren una precisión ultraalta. |
Unidad de medición inercial (IMU) frente a otros sistemas inerciales: IMU frente a AHRS, IMU frente a INS
Las unidades de medición inercial (IMU) son esenciales en muchas aplicaciones de alta tecnología, pero no son los únicos sistemas disponibles para medir el movimiento, la orientación y la navegación. Los sistemas de referencia de actitud y rumbo (AHRS) y los sistemas de navegación inercial (INS) son otros dos sistemas de uso común que también dependen de sensores inerciales. Si bien las IMU proporcionan los datos fundamentales tanto para AHRS como para INS, estos sistemas ofrecen capacidades adicionales y están diseñados para casos de uso específicos. Exploremos cómo las IMU con AHRS e INS .
IMU vs AHRS (Sistema de referencia de actitud y rumbo)
las IMU como los AHRS se utilizan para orientación y seguimiento de movimiento, pero difieren en términos de funciones adicionales y sus respectivos casos de uso.
| Parámetro | IMU | AHRS |
|---|---|---|
| Definición | Una **Unidad de medición inercial (IMU)** mide la aceleración y la velocidad angular, proporcionando datos de movimiento sin procesar. | Un **Sistema de referencia de actitud y rumbo (AHRS)** combina **datos IMU** con sensores adicionales (por ejemplo, magnetómetros) para proporcionar datos de orientación y rumbo. |
| Componentes | Normalmente incluye **acelerómetros** y **giroscopios**, a veces **magnetómetros**. | Utiliza **datos IMU** (acelerómetros y giroscopios) además de **magnetómetros** y, a veces, otros sensores (p. ej., **GPS**, **barómetros**). |
| Producción | Proporciona datos sin procesar de aceleración y velocidad angular. | Genera orientación (actitud) y rumbo (dirección de la brújula) en un marco global (por ejemplo, Norte, Este, Abajo). |
| Exactitud | Las IMU proporcionan un seguimiento preciso del movimiento, pero pueden sufrir **desviaciones** con el tiempo debido a errores del sensor. | AHRS mejora la precisión mediante el uso de referencias externas (magnetómetros, GPS), lo que reduce la deriva con el tiempo. |
| Complejidad | Más simple en diseño y operación, típicamente para seguimiento de movimiento básico. | Más complejo debido al adicional |
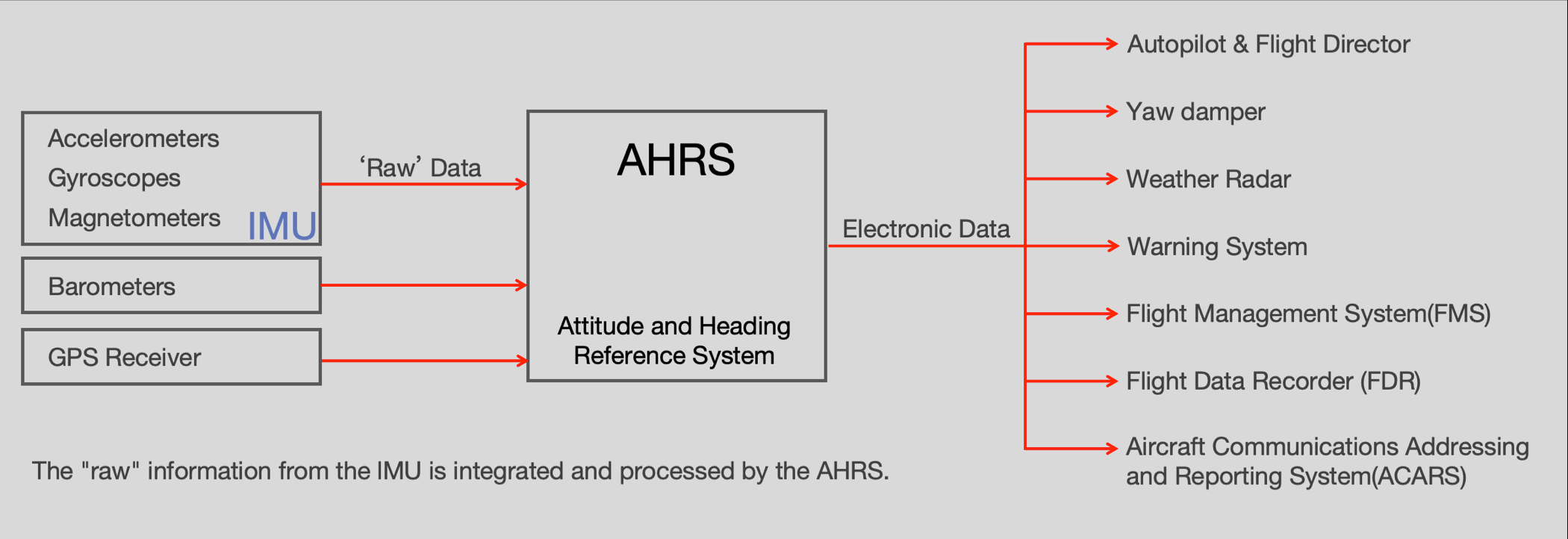
Diferencia clave : las IMU proporcionan datos de sensores sin procesar, mientras que AHRS fusiona estos datos con otros sensores (como magnetómetros) para ofrecer orientación y rumbo precisos. El AHRS se utiliza normalmente cuando se requiere información precisa sobre la actitud y el rumbo.
IMU vs INS (sistema de navegación inercial)
Un sistema de navegación inercial (INS) es un sistema más avanzado que integra IMU con capacidades de procesamiento adicionales, a menudo utilizando algoritmos como el filtrado de Kalman para calcular la posición, velocidad y orientación de un objeto.
| Parámetro | IMU | INS |
|---|---|---|
| Definición | Una **Unidad de medición inercial (IMU)** mide la aceleración y la velocidad angular, proporcionando datos de movimiento sin procesar. | Un **Sistema de navegación inercial (INS)** combina una **IMU** con procesamiento computacional (por ejemplo, filtro de Kalman) para rastrear la posición, la velocidad y la orientación. |
| Componentes | Incluye **acelerómetros** y **giroscopios**; a veces **magnetómetros**. | Combina una **IMU**, **algoritmos** para la fusión de sensores y, a veces, otros sensores (p. ej., **GPS**). |
| Producción | Proporciona datos de aceleración y velocidad angular. | Genera **posición**, **velocidad** y **orientación**, ofreciendo datos de navegación completos. |
| Exactitud | Las IMU tienen una precisión limitada a lo largo del tiempo debido a la deriva. | **INS** mejora la precisión con el tiempo al fusionar datos IMU con algoritmos y, a veces, correcciones externas (por ejemplo, GPS). |
| Complejidad | Sencillo, proporcionando sólo datos de movimiento. | Complejo debido a la fusión de datos, el procesamiento de sensores y la necesidad de algoritmos computacionales. |
| Aplicaciones | Se utiliza para el seguimiento de movimiento básico, como en drones, automoción y robótica. | Se utiliza para **navegación** en **aviones**, **submarinos**, **naves espaciales** y **aplicaciones militares**, donde el seguimiento de posición a largo plazo es fundamental. |
Diferencia clave : mientras que las IMU miden el movimiento y la orientación, el INS utiliza esos datos junto con algoritmos para calcular la posición , la velocidad y la orientación a lo largo del tiempo, proporcionando una solución de navegación completa.
Mercado de unidades de medida inercial y desarrollo futuro: tipos, perspectivas del mercado y tendencias
Las unidades de medición inercial (IMU) son parte integral de los sistemas modernos de navegación, seguimiento de movimiento y control de estabilidad en diversas industrias. La creciente demanda de sistemas autónomos , robótica , aeroespacial y electrónica de consumo ha impulsado la evolución de las tecnologías IMU, aumentando su adopción en todo el mundo. A medida que el mercado de IMU continúa expandiéndose, es esencial comprender los diferentes tipos de IMU, sus condiciones actuales de mercado y las tendencias que dan forma a su desarrollo futuro.
Diferentes tipos de IMU y su descripción general del mercado
Las IMU vienen en varias formas, cada una de las cuales satisface diferentes requisitos de precisión, tamaño, costo y rendimiento. Los tipos de IMU más utilizados son MEMS IMU , FOG IMU y RLG IMU (Ring Laser Gyroscope IMU) . Cada uno tiene sus características únicas, lo que los hace adecuados para aplicaciones específicas. Veamos estos tipos y sus escenarios de mercado actuales.
1. IMU MEMS
Las IMU MEMS son las más utilizadas debido a su tamaño compacto , bajo costo y bajo consumo de energía . Estas IMU se basan en sensores de sistemas microelectromecánicos (MEMS) para medir la aceleración y la velocidad angular. Las IMU MEMS son muy adecuadas para electrónica de consumo, aplicaciones automotrices y sistemas de bajo costo.
| Característica | MEMS IMU |
|---|---|
| Tamaño | Compacto , pequeño y ligero. |
| Costo | Bajo costo, lo que los hace asequibles para su adopción en el mercado masivo. |
| Precisión | Precisión moderada, aunque los modelos más nuevos logran una mayor precisión (p. ej., **0,1°/h**). |
| Aplicaciones | Se utiliza en **electrónica de consumo**, **sistemas automotrices**, **drones**, **robótica** y **vestibles**. |
| Crecimiento del mercado | Fuerte crecimiento impulsado por **teléfonos inteligentes**, **seguridad automotriz**, **tecnología de drones** y **dispositivos IoT**. |
Perspectivas del mercado para las IMU MEMS:
el mercado de IMU MEMS siga creciendo debido a su asequibilidad y versatilidad. Estas IMU se utilizan cada vez más en teléfonos inteligentes , dispositivos portátiles , sistemas de seguridad automotrices , estabilización de drones y robótica . Los de la automoción y la electrónica de consumo siguen siendo impulsores clave del crecimiento, con la creciente adopción de vehículos autónomos y dispositivos IoT (Internet de las cosas)
2. FOG IMU (IMU de giroscopio de fibra óptica)
Las IMU FOG ofrecen alta precisión y baja deriva , lo que las hace ideales para sistemas aeroespaciales , de defensa y en entornos que requieren estabilidad y precisión a largo plazo. Los FOG utilizan tecnología de fibra óptica para medir la velocidad angular y son conocidos por su robustez en condiciones extremas.
| Característica | IMU DE NIEBLA |
|---|---|
| Tamaño | Más grandes y robustas que las IMU MEMS, diseñadas para aplicaciones de alta precisión. |
| Costo | **Mayor costo**, lo que los hace adecuados para aplicaciones especializadas en los sectores **aeroespacial** y **militar**. |
| Precisión | **Alta precisión** con deriva mínima, ideal para **estabilidad a largo plazo** en sistemas **aeroespaciales**, de **defensa** y de **navegación**. |
| Aplicaciones | Se utiliza en **aeroespacial**, **defensa militar**, **sistemas de navegación de alta gama** y **sistemas de guía de precisión**. |
| Crecimiento del mercado | Crecimiento constante en los sectores **aeroespacial**, **militar** y **navegación de alta precisión**, pero limitado por el alto costo. |
Perspectivas del mercado para las IMU FOG:
el de FOG IMU crezca de manera constante en aeroespaciales , de defensa militar y de navegación de alta precisión . La creciente demanda de vehículos autónomos , exploración espacial y sistemas de guía de misiles impulsará la adopción de FOG IMU. Sin embargo, su alto costo y consumo de energía siguen siendo factores limitantes para una mayor penetración en el mercado, particularmente en aplicaciones de consumo de bajo costo.
3. IMU RLG (IMU con giroscopio láser de anillo)
Las IMU RLG son similares a las IMU FOG, pero utilizan giroscopios láser de anillo para medir la velocidad angular. Las IMU RLG son conocidas por su precisión y estabilidad extremadamente altas y, a menudo, se utilizan en sectores militar, aeroespacial y otros sectores de alto rendimiento.
| Característica | IMU RLG |
|---|---|
| Tamaño | Similar a las **FOG IMU**, **más grandes** y más resistentes, diseñadas para **aplicaciones de alta precisión** en entornos hostiles. |
| Costo | **Costo muy alto**, generalmente reservado para sistemas premium de misión crítica en las industrias **aeroespacial** y **militar**. |
| Precisión | **Precisión extremadamente alta** con deriva mínima, a menudo utilizado en sistemas de **navegación de naves espaciales** y de **guía de misiles militares**. |
| Aplicaciones | Se utiliza en **militares**, **naves espaciales**, **navegación por satélite** y otros **sistemas de defensa de alta precisión**. |
| Crecimiento del mercado | Aunque son un nicho, las **RLG IMU** siguen siendo críticas para **defensa de alto rendimiento**, **aeroespacial** y **sistemas espaciales**. El mercado es estable con un crecimiento modesto debido a los altos costos. |
Perspectivas del mercado para las IMU de RLG:
Si bien el RLG IMU es limitado debido a su alto costo, sigue siendo esencial para aeroespaciales y de defensa militar , particularmente para sistemas de orientación de misiles y . Las IMU de RLG seguirán desempeñando un papel fundamental en estos sectores, pero pueden enfrentar la competencia de las IMU de FOG y las tecnologías emergentes.
Tendencias futuras y desarrollo de la unidad de medida inercial
El futuro de las IMU está marcado por varios desarrollos clave impulsados por los avances en la tecnología de sensores, los algoritmos de procesamiento de datos y la creciente demanda de sistemas de precisión en diversas industrias. Estas son algunas de las tendencias clave:
1. Miniaturización e integración con otros sensores
A medida que aumenta la demanda de sistemas compactos y eficientes , existe una tendencia creciente hacia la miniaturización de las IMU . Las IMU MEMS seguirán evolucionando y se volverán aún más pequeñas, más rentables y más potentes. Además, la fusión de sensores es un área de desarrollo importante, donde las IMU se integran con otros sensores, como magnetómetros , GPS y barómetros , para mejorar el rendimiento y la precisión.
2. Alta precisión a menor costo
Los avances recientes en MEMS IMU están impulsando una tendencia hacia lograr alta precisión a un costo menor . Modelos como GUIDE900 y GUIDE900A ahora pueden alcanzar 0,1°/h y 0,05°/h , cerrando la brecha con las IMU FOG . Esto significa que las IMU MEMS se utilizarán en aplicaciones mayor precisión aeroespaciales y militares , que tradicionalmente estaban dominados por las IMU FOG .
3. Integración en Sistemas Autónomos
Las IMU son parte integral del desarrollo de vehículos autónomos , drones y robótica . El creciente interés en la navegación autónoma y el control de movimiento de precisión impulsará la demanda de IMU avanzadas. La integración de IMU con algoritmos de inteligencia artificial y aprendizaje automático está permitiendo que los sistemas se adapten de manera más efectiva a entornos del mundo real.
4. Uso de IA y fusión de sensores
Los algoritmos de IA desempeñarán un papel cada vez más importante en el procesamiento de datos de IMU . Al combinar los datos de la IMU con otras entradas de sensores y utilizar el aprendizaje automático , los sistemas autónomos podrán realizar predicciones y ajustes más precisos. la combinación de IMU con tecnologías como sistemas de visión , LiDAR y radar traspase los límites de la navegación y la estabilización en tiempo real.
5. Mayor durabilidad y resiliencia ambiental
Se espera que las IMU sean aún más robustas y resistentes a condiciones adversas como temperaturas extremas, vibraciones e interferencias electromagnéticas. Las IMU FOG y las IMU MEMS evolucionarán para satisfacer la creciente demanda en aplicaciones aeroespaciales , de defensa e .
