La deriva de temperatura de la IMU es una fuente persistente de error en el giroscopio: a medida que cambia la temperatura, la polarización del giroscopio se modifica y una unidad estática parece estar girando. Dado que esta deriva se integra con el tiempo, incluso una pequeña desviación puede generar un error significativo de actitud o rumbo en UAVs, AGVs, robots y plataformas estabilizadas. La solución eficaz es sistemática: reducir la deriva de temperatura de la IMU mediante el diseño del hardware, caracterizarla en función de la temperatura durante la calibración y compensarla en línea en tiempo real.
La deriva de temperatura de la IMU es una de las principales causas de la degradación de la precisión en sistemas inerciales. Mediante la optimización del hardware, la calibración térmica de rango completo y la compensación en línea, los ingenieros pueden reducir significativamente la deriva y garantizar un rendimiento de actitud estable.
La deriva de temperatura de la IMU se debe al comportamiento físico de los dispositivos MEMS y FOG. A medida que cambia la temperatura, la polarización del sensor se modifica y, si no se corrige, esta deriva se acumula en errores de actitud a largo plazo. Para gestionar la deriva de temperatura de la IMU es necesario comprender cómo afecta la temperatura al sensor, caracterizar su deriva mediante calibración y aplicar compensación en tiempo real. Con el apoyo de un diseño de hardware, filtrado y fusión de sensores adecuados, esta deriva se vuelve predecible y totalmente gestionable.
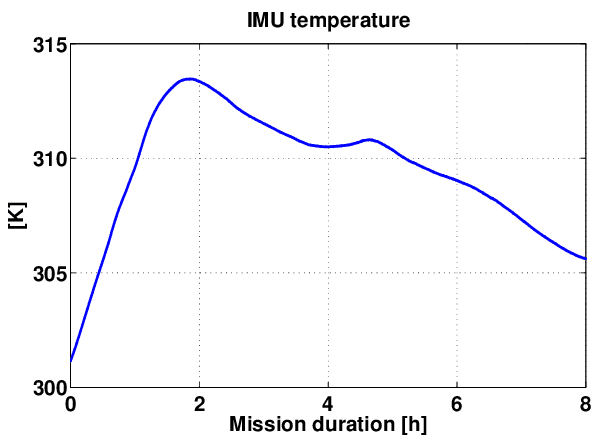
Tabla de contenido
Comprensión de la deriva de temperatura del giroscopio
Antes de explorar cómo mitigar la deriva de temperatura de la IMU, es importante comprender qué representa este fenómeno. La deriva de temperatura no es ruido aleatorio, sino un cambio sistemático en el sesgo a medida que varía la temperatura interna del sensor. Dado que este sesgo está integrado en la estimación de la actitud, la deriva de temperatura de la IMU puede generar grandes errores de rumbo u orientación durante operaciones prolongadas.
La salida de un giroscopio es:
Velocidad angular medida = velocidad real + sesgo + ruido
deriva de temperatura IMU se refiere al término de sesgo que cambia a medida que cambia la temperatura , y este mecanismo difiere para los giroscopios MEMS y FOG.
MEMS Gyroscopes
La deriva de temperatura de las IMU basadas en MEMS se origina por cambios en el módulo elástico, cambios en la frecuencia de resonancia, variaciones de amortiguamiento, deriva de ganancia del ASIC y tensión de empaquetado. Estos efectos suelen causar derivas de calentamiento significativas o cambios de polarización durante transiciones rápidas de temperatura.
Giroscopios FOG
Los dispositivos FOG presentan una menor deriva de temperatura de la IMU, pero aún se ven afectados por las variaciones de fase óptica, los cambios de longitud de onda en la fuente de luz, la expansión de la bobina de fibra y la tensión térmica. Su deriva es más suave, pero aún debe modelarse y compensarse.
Por qué la deriva se convierte en un grave error de actitud
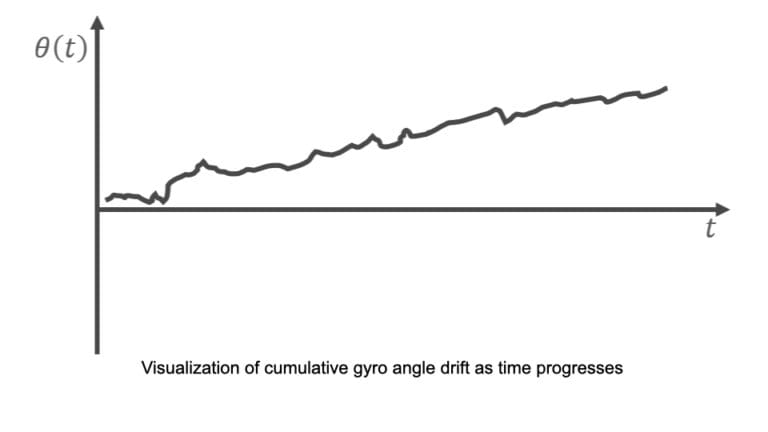
Aunque la deriva de temperatura pueda parecer pequeña al momento de ocurrir, su impacto se agrava al entrar en el proceso de estimación de la actitud. Los giroscopios miden la velocidad angular, y la actitud se obtiene integrando esta velocidad a lo largo del tiempo. Cualquier sesgo sin corregir, por pequeño que sea, continúa acumulándose, lo que produce errores crecientes en el alabeo, el cabeceo y, especialmente, el rumbo durante operaciones de larga duración.
El sesgo giroscópico se integra a lo largo del tiempo:
Error de actitud ≈ ∫ sesgo × tiempo
Por eso, un sesgo aparentemente insignificante, como 0,01 °/s, puede producir varios grados de error de orientación en cuestión de minutos. Cuanto más larga sea la misión y menos referencias externas disponibles, mayor será el impacto de la deriva de temperatura en la precisión general de la navegación.
Tres métodos básicos de ingeniería para mitigar la deriva de temperatura
Mitigar la deriva de temperatura del giroscopio requiere un enfoque de ingeniería por capas que aborda el problema desde su origen, lo modela en condiciones controladas y lo corrige continuamente durante la operación. Los ingenieros suelen aplicar tres métodos complementarios : optimización del hardware, calibración térmica fuera de línea y compensación en línea en tiempo real.
(1) Optimización del hardware: reducción de la deriva en la fuente
Las mejoras de hardware influyen considerablemente en la estabilidad inherente del giroscopio. Entre las estrategias eficaces se incluyen la selección de sensores con coeficientes de temperatura bajos, el uso de materiales estructurales térmicamente estables, el mantenimiento de diseños simétricos y la gestión del flujo de calor interno. Las IMU de alta gama también pueden integrar un calentador o un módulo de control térmico para mantener el sensor a una temperatura de funcionamiento estable, minimizando así la deriva intrínseca.
(2) Calibración de temperatura fuera de línea: construcción de un modelo de sesgo-temperatura
Durante la fabricación, la IMU se coloca en una cámara de temperatura y se barre en todo su rango operativo (p. ej., de −40 °C a +85 °C). Se registran los valores de sesgo en cada punto de temperatura y luego se ajustan a un modelo de compensación (lineal, polinómico o por partes). Los coeficientes del modelo se almacenan en el firmware y constituyen la base para una corrección precisa en tiempo real.
(3) Compensación en línea: corrección de la deriva en tiempo real
Con un modelo de sesgo-temperatura establecido, la IMU compensa la deriva durante la operación. Un sensor de temperatura cerca del núcleo del giroscopio proporciona lecturas de temperatura en tiempo real; el firmware calcula el sesgo esperado utilizando el modelo, y este sesgo se resta de las mediciones sin procesar. Esto contrarresta la deriva causada por el calentamiento, el calentamiento interno y los cambios de temperatura ambiente.

Más allá de la compensación: filtros y fusión de sensores para la estabilidad a largo plazo
Incluso con un diseño de hardware robusto, una calibración precisa y una compensación en tiempo real, siempre persistirá una pequeña desviación residual. Con largos periodos de funcionamiento, estos errores residuales pueden acumularse, por lo que los sistemas de alto rendimiento incorporan filtrado y fusión de sensores para mayor estabilidad.
Técnicas de filtrado
Los filtros paso bajo o adaptativos estabilizan la estimación de sesgo y amortiguan las transiciones de temperatura ruidosas. Los métodos de detección estática permiten al sistema actualizar las estimaciones de sesgo siempre que la IMU esté estacionaria, lo que mejora aún más la estabilidad a largo plazo.
Fusión del sensor
Los algoritmos de fusión introducen referencias externas para suprimir la deriva acumulada. Entre las fuentes de ayuda típicas se incluyen acelerómetros para la corrección de cabeceo/balanceo basada en la gravedad, magnetómetros o GNSS para la estabilización del rumbo, y odometría, visión o LiDAR para la navegación de larga duración. La fusión basada en EKF/UKF ancla el sistema a referencias absolutas, evitando que la deriva causada por la temperatura afecte negativamente al rendimiento.

Cómo elegir la IMU adecuada: MEMS vs. FOG
Seleccionar la IMU correcta con antelación es una de las maneras más eficaces de evitar limitaciones posteriores por deriva de temperatura. Las IMU MEMS son ideales cuando se priorizan el tamaño pequeño, el bajo consumo y la rentabilidad, y cuando se dispone de asistencia externa. Funcionan bien en misiones de corta a media duración y en condiciones ambientales moderadas.
Las IMU FOG son la mejor opción cuando se espera estabilidad a largo plazo, alta precisión de rumbo o amplias variaciones de temperatura. Son preferibles para misiones que no pueden depender de GNSS ni de otras correcciones externas.
Guía sencilla:
- Si su sistema puede confiar en la fusión y necesita un SWaP bajo → elija MEMS.
- Si su sistema no puede tolerar la acumulación de deriva → elija FOG.

Construyendo un sistema estable con la IMU GuideNav adecuada
La deriva de temperatura de la IMU se vuelve manejable cuando se aborda mediante una ingeniería adecuada: optimización del hardware, calibración de temperatura, compensación en tiempo real, filtrado y fusión de sensores. Con estas medidas, los UAV, AGV, robots y sistemas de defensa pueden mantener un rendimiento estable incluso en condiciones térmicas exigentes.
GuideNav ofrece IMUs con una sólida estabilidad térmica, flujos de trabajo de calibración cuidadosamente diseñados y algoritmos de compensación fiables. Seleccionar una IMU GuideNav que se adapte a su entorno operativo y necesidades de precisión garantiza que su sistema comience con una base térmica sólida, minimizando la deriva de temperatura de la IMU y mejorando la fiabilidad a largo plazo.
