FOG vs. MEMS en la navegación submarina: ¿Cuál es más efectivo? (Parte I)
Los giroscopios FOG mantienen una deriva ultrabaja y una estabilidad a largo plazo en condiciones submarinas sin GNSS, mientras que las IMU MEMS ofrecen alternativas compactas y de bajo consumo más adecuadas para inspecciones de corta duración y plataformas sensibles a los costos.
FOG vs RLG: Evaluación de la precisión, la confiabilidad y los costos del ciclo de vida
Tanto FOG como RLG son tecnologías de giroscopio consolidadas para la navegación de defensa. Sin embargo, al compararlas desde el punto de vista de la adquisición, FOG ofrece el equilibrio óptimo entre rendimiento, fiabilidad y coste del ciclo de vida para prácticamente cualquier misión, salvo la disuasión estratégica.
Cómo elegir un FOG que lo integre, funcione y lo apoye
Seleccionar el giroscopio de fibra óptica (FOG) incorrecto puede retrasar los proyectos y aumentar los costos. Los compradores inteligentes buscan más allá de la ficha técnica: eligen un FOG que se integre sin problemas, tenga un rendimiento consistente y ofrezca garantía de servicio a largo plazo y garantía de entrega.
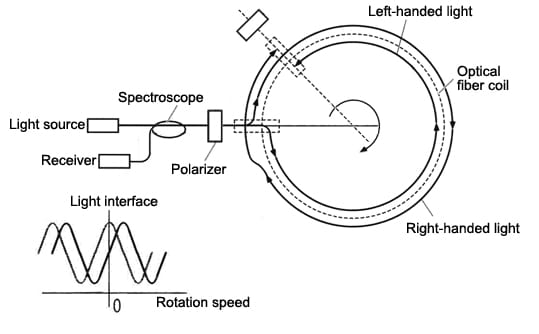
Sensibilidad térmica en giroscopios de fibra óptica: estrategias de diseño para entornos extremos
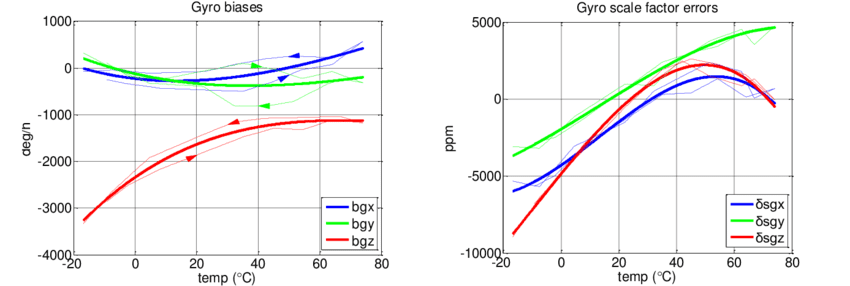
La sensibilidad térmica de los giroscopios de fibra óptica se debe a la expansión del material, las variaciones del índice de refracción y el comportamiento de la fuente óptica. Estrategias avanzadas (compensación térmica, optimización del bobinado y calibración robusta) permiten que los FOG mantengan la precisión en entornos extremos.
Diseño con ARW en mente: Ingeniería práctica para la selección de IMU (Parte 2)
El recorrido aleatorio angular (ARW) establece el límite máximo de precisión de la IMU. No se puede eliminar mediante software, solo se puede reducir mediante la selección de sensores de bajo ruido, un diseño térmico estable, aislamiento de vibraciones y estrategias eficaces de fusión multisensor.
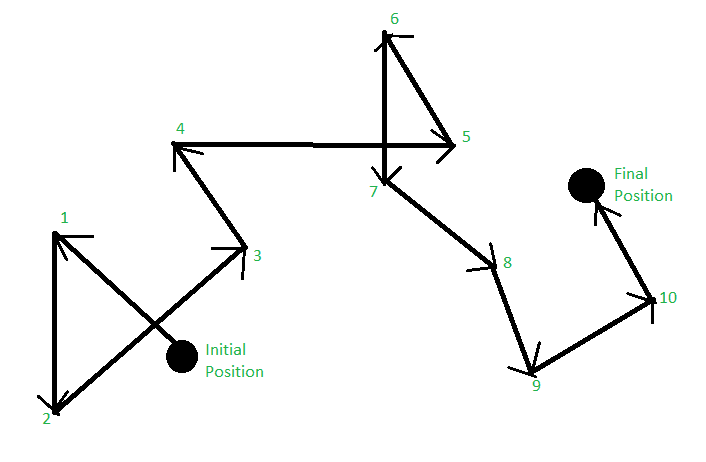
Entendiendo ARW: El límite oculto de la precisión de la IMU (Parte 1)
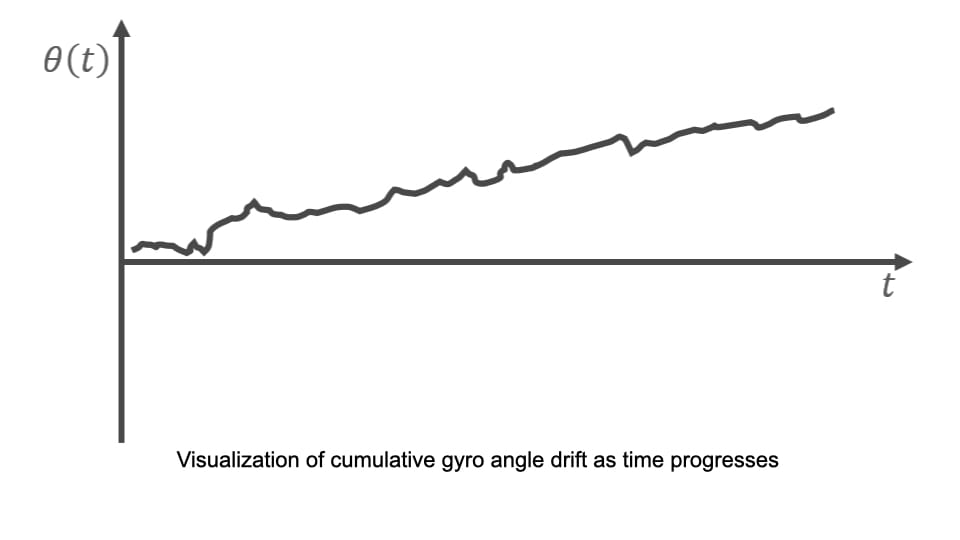
ARW no es una especificación, sino un reloj. Desde el momento en que se inicia la IMU, indica la velocidad a la que se degrada la confianza en la orientación. Cuanto más bajo sea, más tiempo se mantendrá el sistema correcto.
10 errores de diseño que cometen los ingenieros al integrar IMU
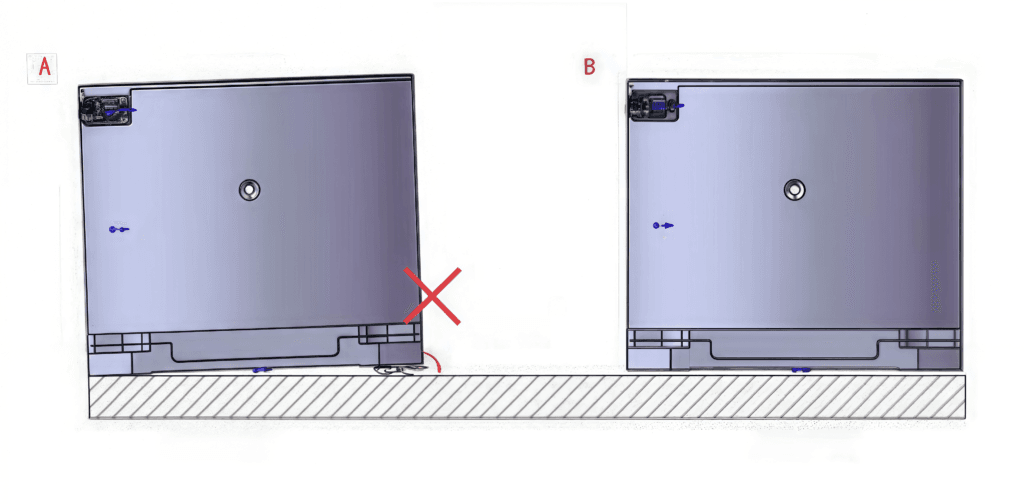
Los errores de integración de IMU pueden afectar la fiabilidad de la navegación. Desde la desalineación y la vibración hasta la calibración deficiente y la excesiva dependencia de la fusión de sensores, los ingenieros suelen repetir los mismos errores. En esta guía, exploramos los 10 errores más comunes en la integración de IMU, explicamos sus consecuencias y ofrecemos soluciones expertas que puede aplicar en sus propios proyectos.
Tecnología FOG en el control de actitud de naves espaciales: más allá de los límites de los MEMS
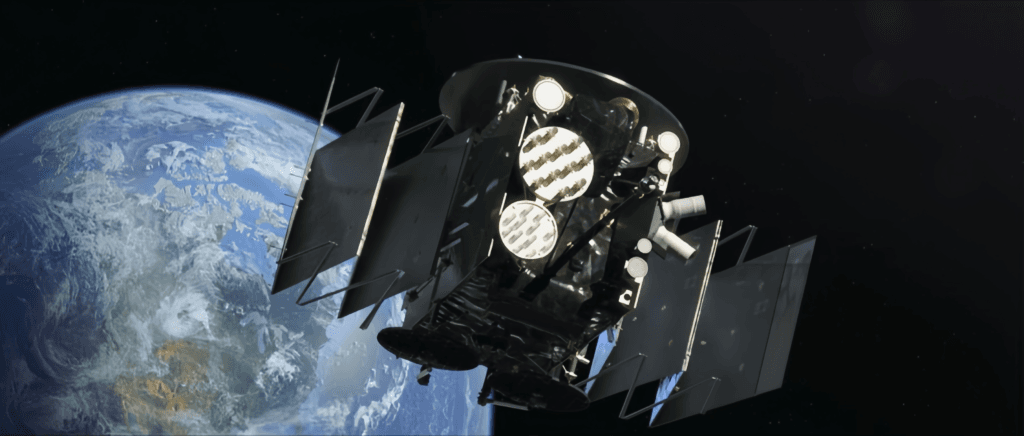
Los giroscopios de fibra óptica superan a los MEMS al ofrecer estabilidad a largo plazo, resistencia a la radiación y precisión confiable durante años. Son indispensables para satélites, constelaciones y sondas espaciales, donde la precisión es fundamental.
Cómo la fusión multisensorial está redefiniendo los sistemas de navegación inercial

La precisión de la navegación inercial se ve limitada, en última instancia, por la calidad del modelado y la compensación de los errores del sensor. Desde la deriva de sesgo hasta el desplazamiento aleatorio, una mitigación eficaz requiere una combinación de diseño de hardware, rutinas de calibración y corrección algorítmica en tiempo real.
Los 10 principales proveedores de unidades de medición inercial (IMU) FOG en 2025

Descubra los 10 principales proveedores de IMU de fibra óptica en 2025, incluyendo Honeywell, Exail, GuideNav y más. Compare la deriva de polarización, el control de exportación y el rendimiento táctico para aplicaciones aeroespaciales y de defensa.