¿Cuándo se debe recalibrar o reemplazar una IMU FOG?
Recalibre su IMU FOG cada 12 a 24 meses para mantener la estabilidad de la polarización. Reemplácela después de 5 a 8 años o cuando la desviación supere las especificaciones para garantizar la fiabilidad de la navegación a largo plazo.
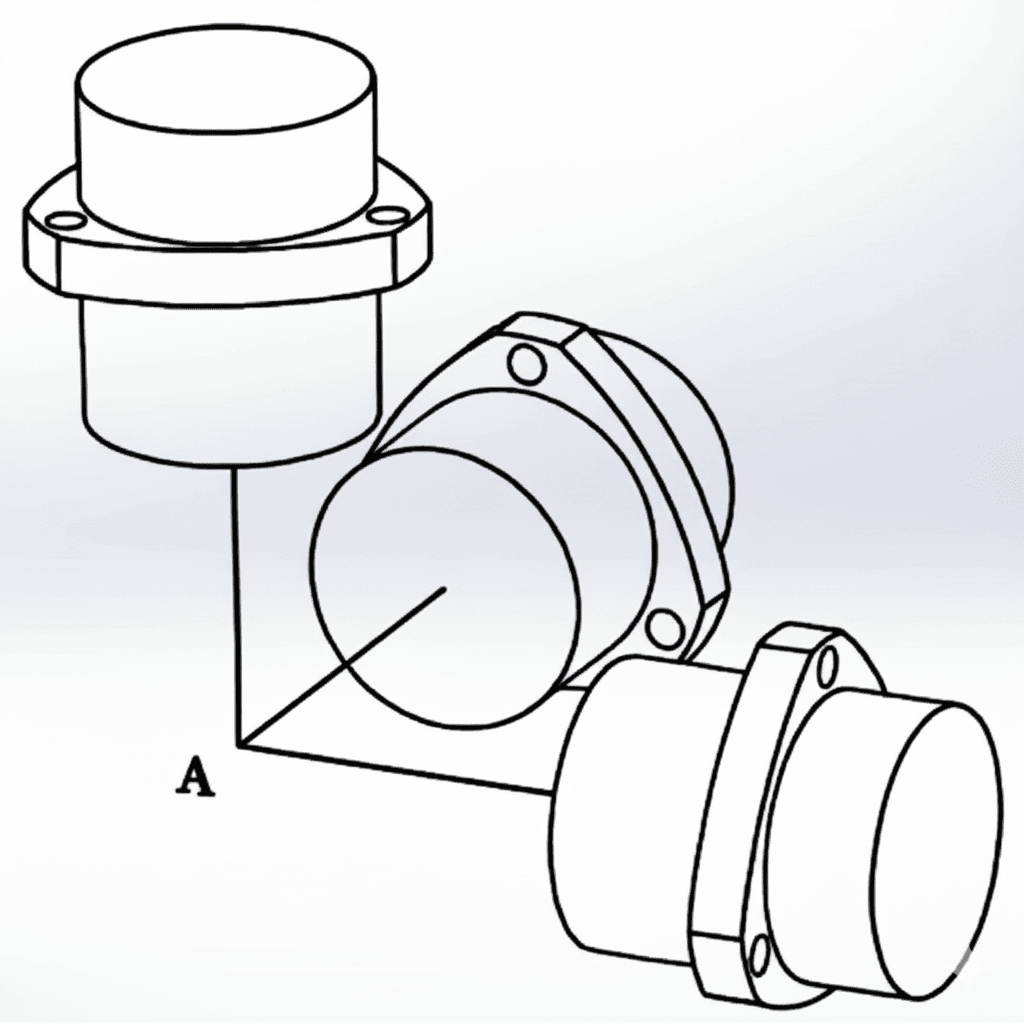
El diseño de GuideNav: cómo las IMU de fibra óptica resistentes resisten golpes y vibraciones

Las robustas IMU de fibra óptica logran una fiabilidad extrema gracias a la combinación de carcasas de titanio, suspensiones de bobinas flotantes, aisladores elastoméricos y de cable, y compensación de señal basada en IA. Estas tecnologías les permiten funcionar a la perfección bajo vibraciones e impactos intensos, algo que los giroscopios convencionales no consiguen.
¿Por qué son esenciales las pruebas de envejecimiento para las IMU y las INS de fibra óptica?
Las pruebas de envejecimiento de las IMU y las INS de fibra óptica no son costos redundantes: son métodos científicos para pronosticar la vida útil, establecer períodos de garantía y asegurar la confiabilidad de la misión bajo estrés del mundo real.
¿Cómo realiza un INS de fibra óptica la inicialización de navegación antes de una misión?
Un INS de fibra óptica se inicializa antes del despegue estabilizando la temperatura, alineando giroscopios y acelerómetros, estimando el sesgo y realizando una alineación de actitud de gruesa a fina, lo que garantiza una navegación precisa desde el primer segundo de vuelo.
¿Por qué las IMU de fibra óptica deben encenderse periódicamente?

Encender una IMU de fibra óptica periódicamente estabiliza su entorno térmico, actualiza la calibración de polarización y evita la degradación a largo plazo de los componentes electrónicos, lo que garantiza un inicio rápido y un rendimiento confiable.
FOG North Finder vs. FOG INS: ¿Cuál es la diferencia real?
Un buscador de norte FOG y un FOG INS no son lo mismo. Un buscador de norte proporciona un rumbo verdadero utilizando la rotación de la Tierra, mientras que un FOG INS proporciona datos de navegación completos (posición, velocidad y actitud) mediante giroscopios, acelerómetros y algoritmos de navegación.
10 errores comunes que cometen los ingenieros al usar giroscopios de fibra óptica (FOG)
Los FOG suelen fallar en el campo no por un diseño deficiente, sino por errores de uso: desalineación, vibración, calibración deficiente o ignorar las interferencias electromagnéticas (EMI). Evitar estos 10 errores comunes garantiza un rendimiento de navegación excepcional. GuideNav ofrece FOG sin ITAR con soporte de integración experto para ayudar a compradores e ingenieros a alcanzar el éxito.
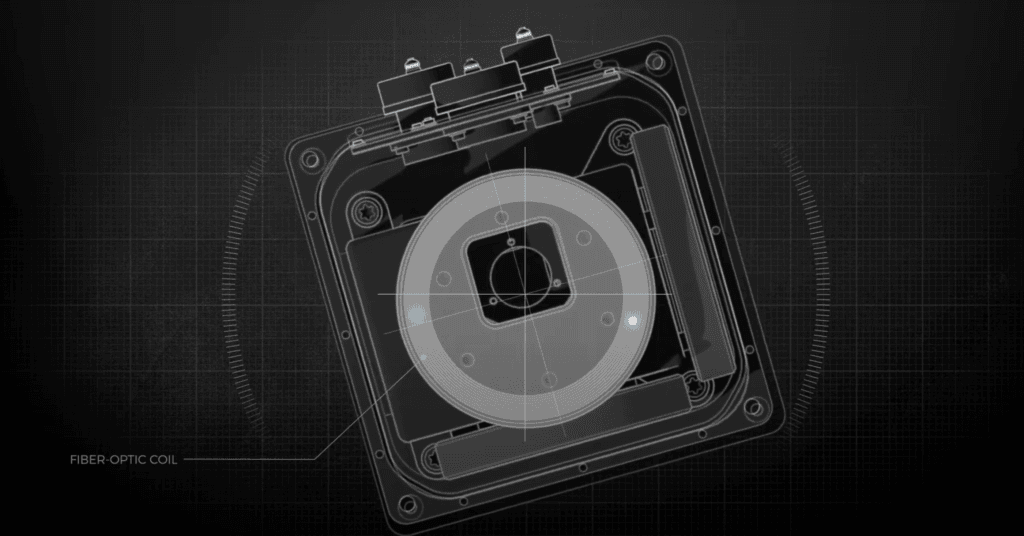
¿FOG de bucle abierto o cerrado? Entendiendo la diferencia
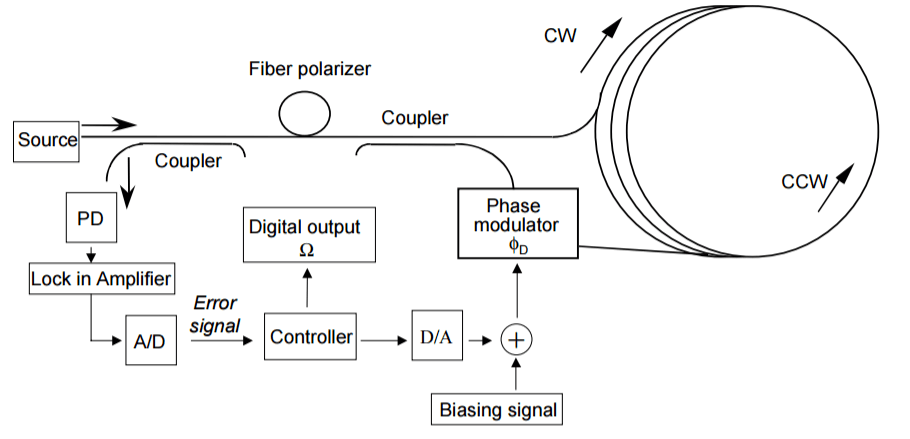
Los FOG de bucle abierto son compactos y rentables, con una precisión media (1–10 °/h) para vehículos aéreos no tripulados (UAV) y robots. Los FOG de bucle cerrado ofrecen una precisión ultraalta (0,001–0,1 °/h), lo que los hace esenciales en submarinos, misiles y sistemas aeroespaciales.
Los 10 principales proveedores de sistemas MEMS INS en 2025

Los 10 principales proveedores de MEMS INS en 2025 incluyen Honeywell, Analog Devices, GuideNav, Safran, TDK InvenSense, STMicroelectronics, Sensonor, Silicon Sensing Systems, Aceinna y SBG Systems.
FOG vs. MEMS en la navegación submarina: ¿Cuál es más efectivo? (Parte II)
Los giroscopios FOG mantienen una deriva ultrabaja y una estabilidad a largo plazo en condiciones submarinas sin GNSS, mientras que las IMU MEMS ofrecen alternativas compactas y de bajo consumo más adecuadas para inspecciones de corta duración y plataformas sensibles a los costos.