Antes de que un UAV o plataforma no tripulada inicie su misión, su sistema de navegación inercial debe alinearse con el entorno. Sin una inicialización adecuada, ni siquiera el mejor INS de fibra óptica puede proporcionar un rumbo, actitud o posición fiables. El proceso puede tardar solo unos minutos, pero la inicialización de la navegación es fundamental para el éxito de la misión.
Un INS de fibra óptica se inicializa antes del despegue estabilizando la temperatura, alineando giroscopios y acelerómetros, estimando el sesgo y realizando una alineación de actitud de gruesa a fina, lo que garantiza una navegación precisa desde el primer segundo de vuelo.
La inicialización suele subestimarse, pero determina si los datos de navegación comienzan con precisión o se desvían desde el principio. En el caso de los UAV y otras plataformas autónomas, el procedimiento incluye el acondicionamiento térmico, la calibración de sesgo y la alineación de actitud. Cada paso garantiza que el INS esté listo para la misión incluso antes de que los motores o rotores comiencen a girar.
Tabla de contenido
¿Por qué la estabilización de la temperatura viene primero?
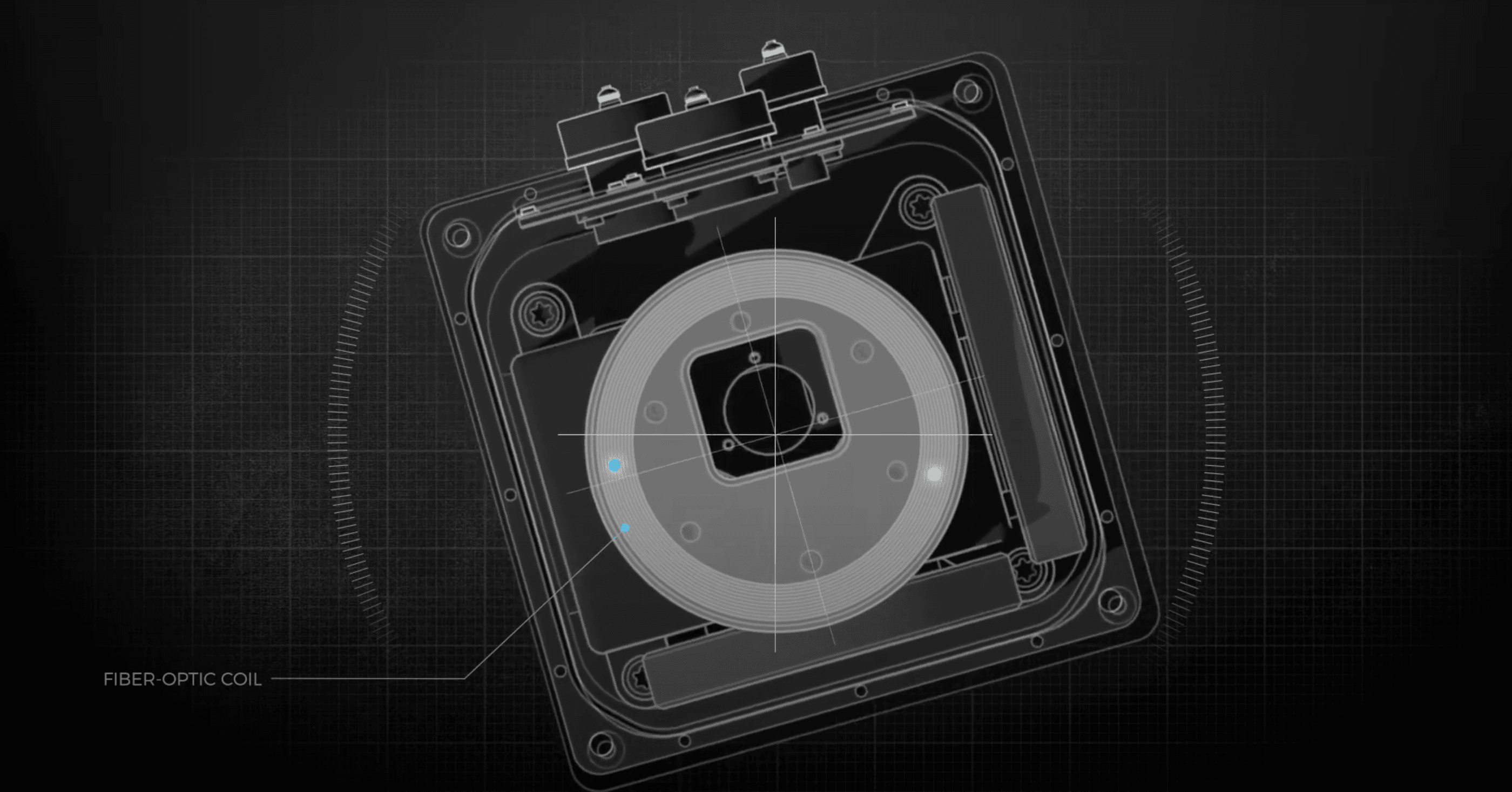
Antes de comenzar cualquier alineación, un INS de fibra óptica debe alcanzar el equilibrio térmico. Esta etapa es crucial, ya que las fluctuaciones de temperatura afectan directamente la polarización del sensor y el factor de escala. Omitirla prácticamente garantiza una inicialización deficiente.
- Los giroscopios y acelerómetros son muy sensibles a la temperatura, por lo que incluso pequeños cambios pueden distorsionar las lecturas.
- Es necesario un periodo de calentamiento→ el sistema necesita tiempo para estabilizarse antes de que se puedan generar datos fiables.
- Sin estabilización, la deriva del sesgo puede aumentar diez veces, lo que conlleva una degradación de la calidad de la alineación.
- Buenas prácticas: encender el sistema entre 10 y 20 minutos antes de la salidapara garantizar que el INS arranque desde una línea base estable.
¿Cómo se estiman los sesgos durante la inicialización?
Una vez encendido y en reposo, el sistema de navegación inercial (INS) mide las señales de sus giroscopios y acelerómetros a lo largo del tiempo. Estas lecturas se utilizan para estimar el sesgo estático, que representa el error inherente del sensor en ausencia de movimiento. Incluso los sesgos a nivel microscópico, si no se corrigen, pueden acumularse y generar grandes errores de navegación. Al promediar y modelar las señales durante esta fase, el INS inicia la alineación precisa con datos limpios y fiables.
¿Qué sucede durante la alineación gruesa?
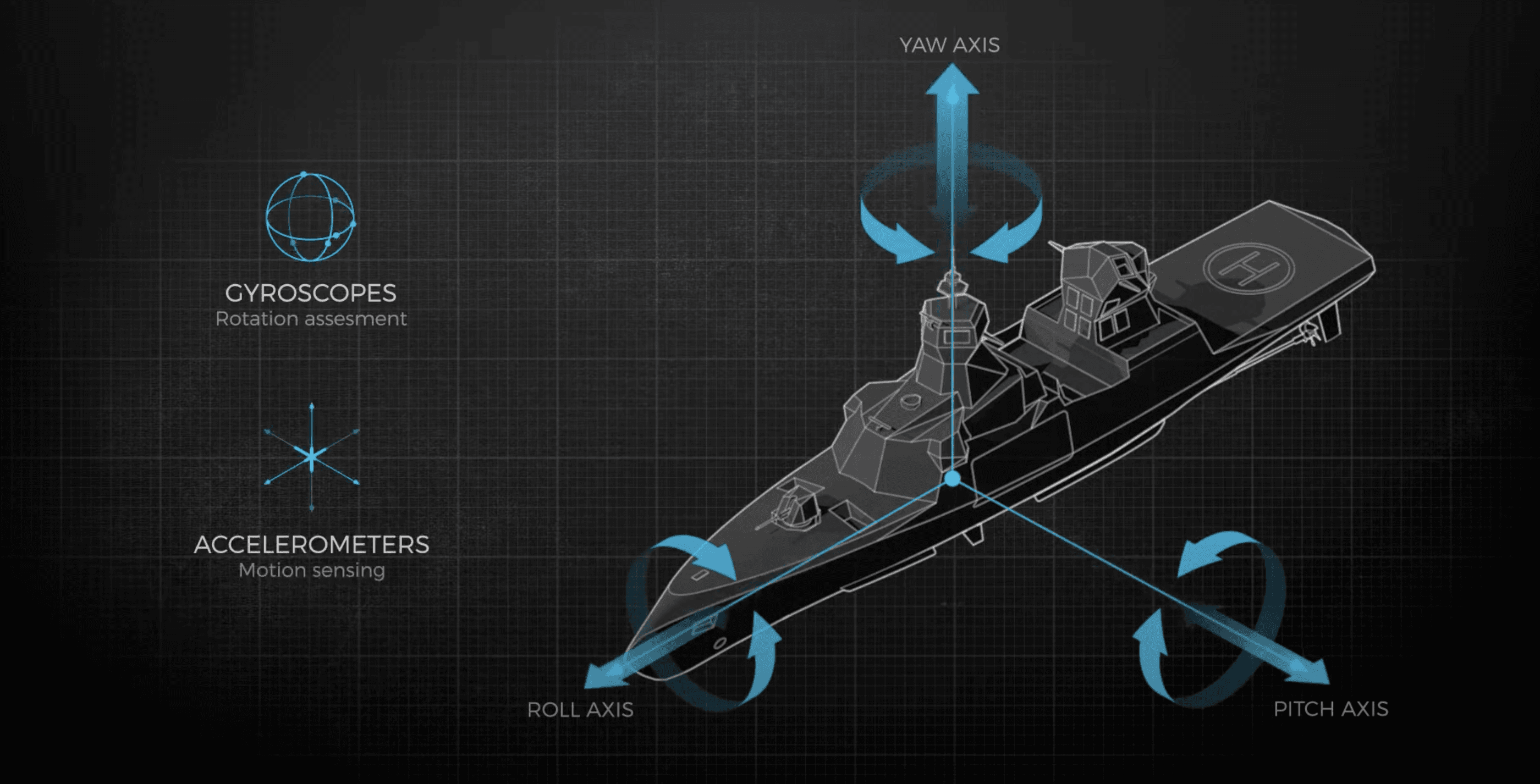
Tras la estabilización térmica y la estimación del sesgo, el sistema de navegación inercial (INS) de fibra óptica inicia la fase de alineación gruesa. En esta etapa, el sistema aún no busca la máxima precisión, sino que se centra en obtener una primera estimación fiable de su orientación. Al basarse en referencias naturales (la gravedad y la rotación de la Tierra), el INS puede establecer una línea base para el cabeceo, el balanceo y el rumbo. Este proceso es fundamental, ya que sin una alineación gruesa sólida, la alineación fina no puede converger correctamente.
- La gravedad de los acelerómetros → proporciona cabeceo y balanceo.
- Rotación de la Tierra desde los giroscopios → proporciona el rumbo.
- El proceso tarda varios minutos → proporcionando una línea base de actitud aproximada.
- Esta línea base se perfecciona más tarde → formando la base para una alineación fina.
¿Cómo se consigue la alineación fina?
Una vez que la alineación inicial proporciona un punto de partida, el sistema pasa a la alineación final, donde la precisión mejora gradualmente. En esta fase, el sistema de navegación inercial (INS) de fibra óptica aplica un filtrado avanzado —a menudo un filtro de Kalman—para combinar las señales de los sensores y reducir los errores residuales. La alineación final ajusta continuamente el rumbo, el cabeceo y el balanceo, reduciendo las pequeñas desviaciones que quedan tras la alineación inicial. Con cada ciclo, el INS converge hacia una precisión de navegación óptima, lo que garantiza que, cuando el UAV finalmente inicie su misión, su orientación sea estable y fiable.
¿Por qué el INS debe permanecer estacionario?
Durante la inicialización, el sistema de navegación inercial (INS) debe separar las señales de referencia naturales—la gravedad y la rotación terrestre— de cualquier movimiento real de la plataforma. Si el UAV se mueve durante este proceso, las lecturas de los sensores se contaminan, lo que provoca una estimación de sesgo inexacta y una alineación incorrecta. Por lo tanto, mantener el sistema completamente inmóvil es fundamental para garantizar una inicialización fiable.
Puntos clave para recordar:
- El movimiento introduce señales falsasque el sistema puede malinterpretar como parte de la alineación.
- Las condiciones estacionarias permiten una verdadera estimación del sesgo, produciendo un modelo más limpio para la corrección de la deriva.
- Cualquier vibración o movimiento puede retrasar o corromper la inicialización, forzando tiempos de convergencia más largos.
¿Cómo mejoran las ayudas GNSS la inicialización?
El GNSS puede acelerar drásticamente el proceso de alineación al proporcionar información absoluta sobre la posición y la velocidad. Al combinarse con un INS de fibra óptica, estos datos externos reducen el tiempo necesario para lograr una navegación precisa.
| Con la ayuda del GNSS | Sin ayuda GNSS |
|---|---|
| La alineación converge mucho más rápido, a menudo en unos pocos minutos. | La alineación depende únicamente de sensores inerciales y tarda más en estabilizarse. |
| La precisión del rumbo mejora rápidamente, especialmente durante la alineación fina. | Los errores de rumbo pueden seguir siendo mayores hasta que transcurra suficiente tiempo. |
| Ideal para misiones UAV de despliegue rápido. | Adecuado para operaciones sin GNSS, pero requiere paciencia. |
¿Cuáles son los riesgos de una mala inicialización?
Cuando la inicialización no se realiza correctamente, se introducen errores en la solución de navegación desde el principio. Estos problemas pueden permanecer ocultos al principio, pero pueden afectar gravemente el rendimiento de la misión una vez que el UAV esté en el aire.
- Los errores de rumboconducen a rutas de navegación incorrectas y a una deriva acumulativa.
- Desviaciones de ruta→ Los UAV pueden desviarse de las líneas de vuelo planificadas, lo que requiere correcciones frecuentes.
- La dependencia del GNSSreduce la fiabilidad en entornos sin cobertura GNSS.
- Tiempos de convergencia prolongados→ desperdicio de tiempo y energía operativa.
- Menor confianza→ los operadores no pueden confiar plenamente en la solución de navegación.
El último paso antes del vuelo
Piense en la inicialización previa al vuelo como la silenciosa cuenta regresiva antes del lanzamiento de un cohete. Nada dramático ocurre en el exterior, pero cada sensor, algoritmo y circuito dentro del INS de fibra óptica se está ajustando a su lugar. Si se omite la cuenta regresiva, el lanzamiento corre el riesgo de fracasar; si se respeta, la misión comienza con confianza.
Para los operadores de UAV, esto significa no apresurarse en el calentamiento, la estimación de sesgo ni la alineación. Cada paso es invisible, pero crucial para la precisión en el aire. La recompensa es simple: menos sorpresas, convergencia más rápida y un sistema de navegación confiable cuando el GNSS no está disponible.
En GuideNav, diseñamos nuestras unidades INS de fibra óptica para apoyar esta disciplina con un calentamiento rápido, autopruebas robustas y algoritmos de alineación confiables. Siga los pasos correctos, combínelos con la tecnología adecuada y su UAV siempre despegará listo para los desafíos que se avecinan.
