"¿Deberíamos optar por MEMS o FOG?", es la pregunta que más escucho, y no porque la gente desconozca las especificaciones. Lo que es incierto es lo que realmente importa en la práctica: ¿la deriva, la resistencia a los impactos o simplemente el presupuesto? Y con demasiada frecuencia, la decisión equivocada no fracasa del todo, sino que fracasa discretamente, hasta que es demasiado tarde para recuperarse.
Las IMU MEMS son más pequeñas, ligeras y rentables, lo que las hace ideales para sistemas con limitaciones de espacio y potencia. Las IMU FOG, en cambio, ofrecen una estabilidad de polarización significativamente mejor, menor deriva y un rendimiento superior en entornos hostiles o sin GNSS.
Las ventajas y desventajas no son obvias: veamos lo que realmente importa.
Tabla de contenido
¿Cómo funcionan los giroscopios MEMS y FOG?
Los giroscopios MEMS miden el movimiento detectando pequeños cambios en una estructura de silicio vibrante, como si se detectara la oscilación de un diapasón al girarlo. Están construidos sobre chips a microescala, lo que los hace compactos, energéticamente eficientes y asequibles.
Los giroscopios FOG , por otro lado, se basan en la luz. Envían rayos láser a través de una larga bobina de fibra óptica; cuando el dispositivo gira, los rayos se desincronizan ligeramente, un fenómeno denominado efecto Sagnac. Esto permite a los FOG detectar la rotación con una precisión excepcional, sin piezas móviles y una estabilidad extrema a lo largo del tiempo.
MEMS vs FOG: ¿Cómo elegir el adecuado?
Elegir entre MEMS y FOG no tiene por qué ser complejo: al centrarse en unos pocos factores de rendimiento clave, puede encontrar rápidamente la opción adecuada para su aplicación.
1. Precisión
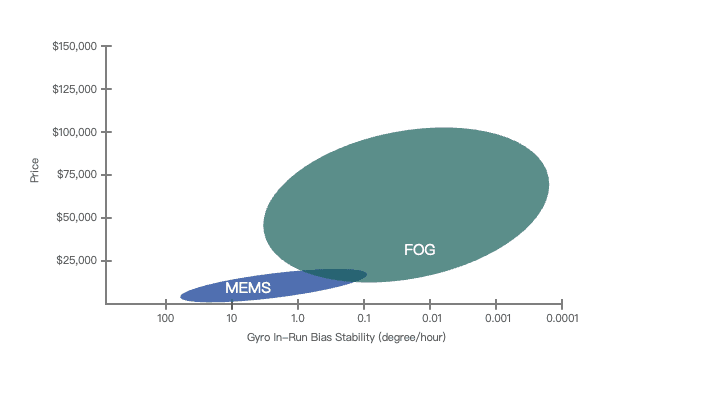
Al evaluar la precisión, los parámetros más críticos son la estabilidad del sesgo y el recorrido aleatorio angular (ARW) . A continuación, se presenta una comparación de los productos GuideNav según estas métricas clave.
| Parámetro | MEMS | NIEBLA |
|---|---|---|
| Estabilidad de polarización (°/h) | 0.05 ~ 3 | 0.003 ~ 0.5 |
| Paseo aleatorio angular (°/√h) | 0.05 ~ 0.45 | 0.0002 ~ 0.02 |
2. Tamaño y peso
Los MEMS son compactos y livianos para sistemas con limitaciones de espacio, mientras que los FOG son más grandes y pesados, adecuados para plataformas fijas o de alta gama.
3. Consumo de energía
Los MEMS suelen consumir menos de 1 W, lo que los hace ideales para plataformas móviles y alimentadas por batería. En cambio, los FOG pueden requerir más de 10 W debido a sus sistemas ópticos basados en láser y, a menudo, requieren una gestión térmica adicional, según datos comparativos de la cartera de productos de GuideNav.
4. Estabilidad a largo plazo
Los FOG de circuito cerrado ofrecen una precisión superior a largo plazo y resiliencia ambiental, mientras que los MEMS, si bien avanzan en técnicas de compensación, aún están rezagados en cuanto a estabilidad sostenida.
5. Cost
Los MEMS son rentables y adecuados para aplicaciones de gran volumen, mientras que los FOG son sustancialmente más caros y están dirigidos a mercados de alta gama y de precisión crítica.
Después de delinear las distinciones principales en precisión, factor de forma, eficiencia energética, estabilidad a largo plazo y costo, se presenta una comparación integral en la siguiente tabla para respaldar una evaluación más informada.
| Característica | Unidad de gestión de impulsos MEMS | IMU de niebla |
|---|---|---|
| Tecnología | Sensores micromecánicos basados en silicio | Giroscopios ópticos que utilizan bobinas de fibra e interferencia de luz |
| Tamaño y factor de forma | Muy compacto, adecuado para diseños con espacio limitado | Forma más voluminosa debido al enrutamiento de la fibra y la óptica |
| Exactitud | Precisión moderada para uso general | Alta precisión adecuada para sistemas críticos |
| Costo | Bajo costo, ideal para producción en volumen | Costo significativamente mayor debido a la complejidad |
| Consumo de energía | Altamente eficiente con un consumo mínimo de energía | Consume más energía, generalmente para uso de alta gama |
| Aplicaciones típicas | Drones, wearables, automoción, dispositivos de consumo | Defensa, aeroespacial, marina, industria de alta gama |
| Principio de funcionamiento | Detecta movimiento a través de estructuras de masa vibrantes | Utiliza el efecto Sagnac para detectar la velocidad angular |
| Estabilidad ambiental | Sensible al calor y a las vibraciones a lo largo del tiempo | Altamente resistente a la deriva térmica y al estrés mecánico |
| Nivel de precisión | Adecuado para navegación asistida o de corta duración | Mantiene el rumbo del subgrado durante períodos prolongados |
| Sensibilidad | Rápido y receptivo en sistemas dinámicos | Respuesta estable; ligeramente más lenta que MEMS |
| Durabilidad | Resistente pero menos estable en condiciones extremas | Diseñado para entornos extremos y de misión crítica |
| Esfuerzo de integración | Fácil de integrar con la mayoría de las plataformas | Requiere una configuración cuidadosa y una alineación a nivel de sistema |
¿Puede la precisión de MEMS superar a FOG?
Desde la perspectiva de un experto, FOG sigue siendo líder en precisión , especialmente en términos de estabilidad de polarización y bajo nivel de ruido . Por eso sigue siendo la opción predilecta para la navegación de alta precisión .
Pero la tecnología MEMS se está poniendo al día rápidamente . Los giroscopios MEMS de grado táctico actuales pueden alcanzar:
- Inestabilidad de polarización tan baja como 0,5°/h
- Paseo aleatorio angular alrededor de 01°/√hr
Eso los coloca cerca de los FOG de nivel de entrada , pero en un formato más pequeño, más liviano y mucho más económico
Si bien los FOG de primer nivel aún superan a los MEMS en casos de uso de ultraprecisión y larga duración, los MEMS modernos ahora son lo suficientemente precisos para muchas aplicaciones exigentes, especialmente cuando el tamaño, el peso, la potencia y el costo son importantes.

¿Cuáles son los casos de uso en el mundo real para las IMU MEMS y FOG?
La elección entre MEMS y FOG depende, en última instancia, de lo que el sistema necesita soportar y de su tolerancia a errores a lo largo del tiempo. A continuación, se detalla el lugar que ocupa cada tecnología en las implementaciones reales:
Casos de uso de IMU MEMS
Las IMU MEMS están optimizadas para aplicaciones donde el tamaño, el peso, el consumo de energía y la rentabilidad tienen prioridad sobre la precisión ultraalta.
- Vehículos aéreos no tripulados (UAV)
Ideales para drones pequeños y medianos que dependen de GNSS para corrección - Robótica industrial y de consumo
Se utiliza para seguimiento de movimiento, control de equilibrio y retroalimentación de orientación. - Sistemas automotrices (ADAS, navegación a estima, estabilización)
Cuando se fusionan con GNSS o codificadores de ruedas - Dispositivos portátiles y wearables
Detección de movimiento en dispositivos compactos alimentados por batería
Los MEMS funcionan bien en sistemas donde hay corrección externa disponible y la tolerancia a la deriva es aceptable.
Casos de uso de FOG IMU
Las IMU FOG se seleccionan cuando la precisión inercial debe permanecer inalterada bajo estrés, aislamiento o duraciones prolongadas .
- Plataformas militares y de defensa
Navegación táctica, estabilización de vehículos, guiado de misiles y torretas - Sistemas marinos y submarinos
Buques de larga duración, ROV y navegación inercial en condiciones de interrupción del GNSS - Aplicaciones espaciales y aeroespaciales
Plataformas de lanzamiento, satélites y control de actitud de naves espaciales - de topografía y perforación de precisión
que requieren un avance de subgrado a lo largo del tiempo sin reinicio
FOG permite la continuidad de la misión donde los MEMS se desviarían más allá de los umbrales aceptables.
En GuideNav, ofrecemos una cartera completa de IMU MEMS y FOG, diseñadas para satisfacer las diversas necesidades de aplicaciones comerciales, industriales y de defensa. Ya sea que prioricemos el tamaño y la eficiencia o la precisión inercial a largo plazo, ofrecemos opciones adaptadas a cada entorno de rendimiento.

¿Cuánto más caro es el FOG en comparación con el MEMS?
Las IMU basadas en FOG suelen ser de 8 a 10 veces más caras que las unidades basadas en MEMS. Esta diferencia de precio se debe a:
- Componentes de alto costo como bobinas de fibra y óptica interferométrica
- Ensamblaje de precisión que requiere tolerancias estrictas y calibración
- Producción de bajo volumen, a diferencia de los MEMS que se benefician de la fabricación en masa
Por el contrario, las IMU MEMS utilizan procesos de silicio rentables y son más fáciles de escalar, lo que da como resultado precios a menudo inferiores a una décima parte de los de los sistemas FOG.
¿Cómo decido si necesito memorias o niebla para mi proyecto?
Depende de su aplicación, la precisión requerida y el entorno. En GuideNav, ofrecemos IMU y sistemas INS basados en MEMS y FOG, desde unidades compactas y económicas hasta soluciones tácticas de alta precisión.
Para determinar qué tecnología de sensores se adapta mejor a su proyecto, recomendamos evaluar los siguientes factores:
- Detalles de la aplicación.
- Requisitos clave de rendimiento: (por ejemplo, estabilidad del sesgo del objetivo, rango dinámico, condiciones ambientales, etc.)
¿Aún no estás seguro? Comparte tus especificaciones: te recomendaremos la mejor opción para tu sistema.
