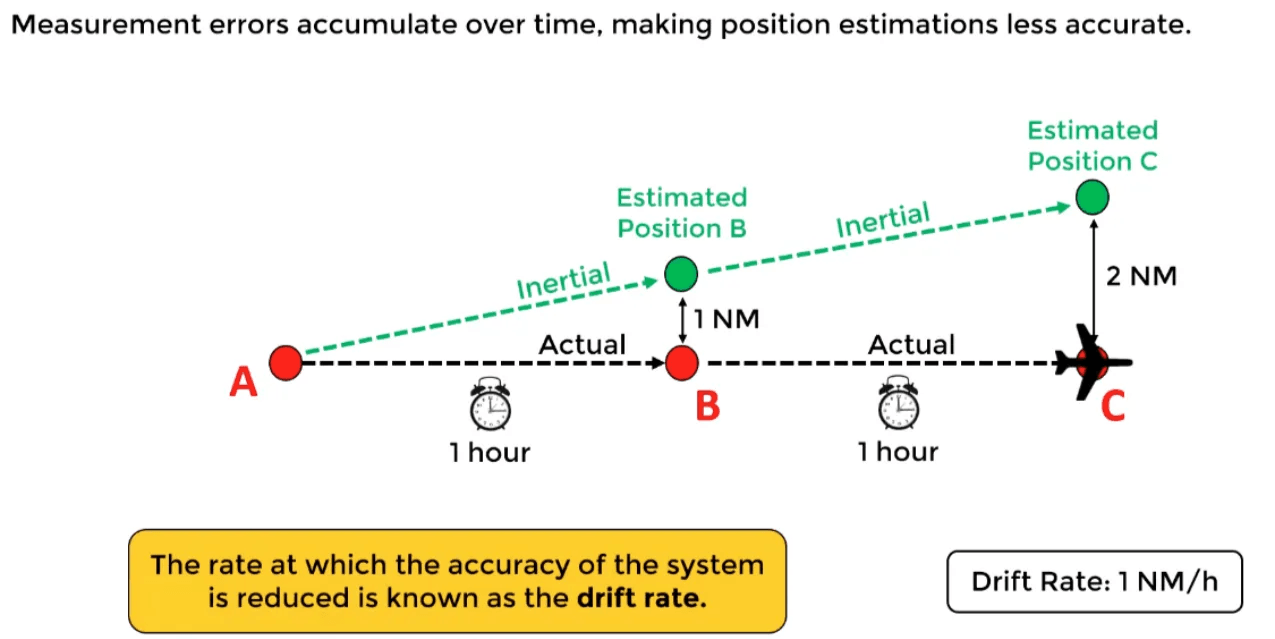
En el contexto de los sistemas de navegación inercial (INS) , la deriva se refiere a la acumulación gradual de errores a lo largo del tiempo, lo que hace que las mediciones del sistema (como la posición, la velocidad o el rumbo) se vuelvan gradualmente menos precisas.
Así es como funciona:
- Sin corrección externa : En el INS, se utilizan sensores como acelerómetros y giroscopios para calcular aspectos como la posición y la dirección. Sin embargo, estos sensores no son perfectos y sus pequeños errores pueden acumularse con el tiempo.
- Los pequeños errores se acumulan : incluso un pequeño error en la medición (como un pequeño cambio de posición o un ligero error en la rotación) puede crecer con el tiempo, haciendo que el sistema se “desvíe” del valor real.
Por qué es importante:
La desviación es un problema común en el INS, ya que aumenta el número de errores a medida que el sistema continúa funcionando. Sin correcciones de fuentes externas (como el GPS), la desviación puede provocar que el sistema genere resultados inexactos con el tiempo, lo que afecta la precisión general del sistema de navegación.