
Cómo los giroscopios MEMS impulsan la robótica moderna: desde vehículos guiados automáticos (AGV) de almacén hasta brazos humanoides
Los giroscopios MEMS constituyen el núcleo inercial de la robótica avanzada, ofreciendo detección precisa de velocidad angular, seguimiento de la orientación en tiempo real y retroalimentación de movimiento fiable en paquetes compactos y de bajo consumo. Son indispensables para permitir una navegación estable y un movimiento ágil tanto para AGV como para brazos robóticos humanoides.

¿MEMS o FOG para la estabilización de LRF en plataformas blindadas? Esto es lo que necesita saber
Según la experiencia práctica, los giroscopios FOG superan a los MEMS en términos de estabilidad a largo plazo, inmunidad a las vibraciones y robustez térmica en aplicaciones LRF montadas en vehículos. Los MEMS siguen siendo viables para plataformas con limitaciones de espacio o presupuestos ajustados, pero requieren un diseño de compensación cuidadoso.

Ciclo de vida del giroscopio FOG: durabilidad, calibración y mantenimiento
En implementaciones prácticas, mantener la precisión y estabilidad de un giroscopio de fibra óptica (FOG) requiere más que un diseño de sensor avanzado: exige un marco de sistema calibrado que incluya compensación térmica, aislamiento mecánico y mantenimiento consciente del ciclo de vida.
¿Por qué las IMU de giroscopio de fibra óptica (FOG) son revolucionarias para las aplicaciones de cardán?
Por eso confío en las IMU de giroscopio de fibra óptica: brindan precisión y resistencia inigualables y transforman estabilizadores inestables y poco confiables en plataformas estables sin importar las condiciones.
¿Cómo pueden las soluciones INS superar los desafíos de navegación en entornos complejos?
Los Sistemas de Navegación Inercial (INS) funcionan independientemente de las señales externas midiendo la aceleración y la velocidad angular mediante sensores internos, lo que los hace indispensables en entornos donde las señales GNSS están bloqueadas o son poco fiables. Mediante una sofisticada fusión de sensores, compensación de errores y correcciones basadas en IA, el INS ofrece un posicionamiento continuo y preciso en los escenarios más exigentes.
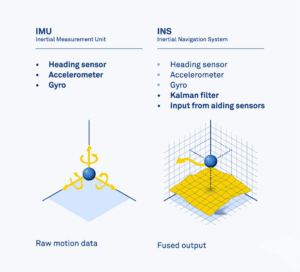
¿Cuál es la diferencia entre una IMU y un INS?
Una IMU mide el movimiento, mientras que un INS utiliza datos de la IMU para calcular la posición y la orientación a lo largo del tiempo: la IMU es un sensor, el INS es un sistema.