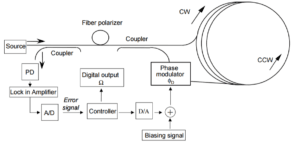
¿FOG de bucle abierto o cerrado? Entendiendo la diferencia
Los FOG de bucle abierto son compactos y rentables, con una precisión media (1–10 °/h) para vehículos aéreos no tripulados (UAV) y robots. Los FOG de bucle cerrado ofrecen una precisión ultraalta (0,001–0,1 °/h), lo que los hace esenciales en submarinos, misiles y sistemas aeroespaciales.

Los 10 principales proveedores de sistemas MEMS INS en 2025
Los 10 principales proveedores de MEMS INS en 2025 incluyen Honeywell, Analog Devices, GuideNav, Safran, TDK InvenSense, STMicroelectronics, Sensonor, Silicon Sensing Systems, Aceinna y SBG Systems.
FOG vs. MEMS en la navegación submarina: ¿Cuál es más efectivo? (Parte II)
Los giroscopios FOG mantienen una deriva ultrabaja y una estabilidad a largo plazo en condiciones submarinas sin GNSS, mientras que las IMU MEMS ofrecen alternativas compactas y de bajo consumo más adecuadas para inspecciones de corta duración y plataformas sensibles a los costos.

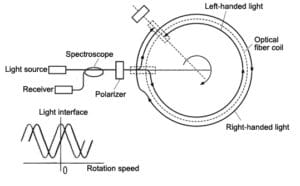
FOG vs. MEMS en la navegación submarina: ¿Cuál es más efectivo? (Parte I)
Los giroscopios FOG mantienen una deriva ultrabaja y una estabilidad a largo plazo en condiciones submarinas sin GNSS, mientras que las IMU MEMS ofrecen alternativas compactas y de bajo consumo más adecuadas para inspecciones de corta duración y plataformas sensibles a los costos.
FOG vs RLG: Evaluación de la precisión, la confiabilidad y los costos del ciclo de vida
Tanto FOG como RLG son tecnologías de giroscopio consolidadas para la navegación de defensa. Sin embargo, al compararlas desde el punto de vista de la adquisición, FOG ofrece el equilibrio óptimo entre rendimiento, fiabilidad y coste del ciclo de vida para prácticamente cualquier misión, salvo la disuasión estratégica.
Cómo elegir un FOG que lo integre, funcione y lo respalde
Seleccionar el giroscopio de fibra óptica (FOG) incorrecto puede retrasar los proyectos y aumentar los costos. Los compradores inteligentes buscan más allá de la hoja de datos: eligen un FOG que se integre sin problemas, tenga un rendimiento consistente y ofrezca garantía de servicio a largo plazo y garantía de entrega.