En mi trabajo desarrollando sistemas de navegación, he descubierto que la verdadera fiabilidad reside en la independencia, no en la dependencia de señales externas. Por eso los Sistemas de Navegación Inercial (INS) desempeñan un papel tan crucial: operan completamente con mediciones internas, proporcionando una navegación consistente y continua en una amplia gama de entornos, desde vehículos autónomos hasta plataformas aeroespaciales.
Un sistema de navegación inercial (INS) determina la posición, la velocidad y la orientación utilizando únicamente sensores de movimiento internos, lo que permite una navegación precisa en una amplia gama de aplicaciones, incluidos sistemas autónomos, plataformas submarinas y operaciones de defensa de misión crítica.
Antes de seleccionar un INS para su aplicación, es útil comprender claramente sus principios de funcionamiento y los tipos de sistemas.
Tabla de contenido

¿Qué es un sistema de navegación inercial (INS)?
Un Sistema de Navegación Inercial (INS) es un sistema autónomo que utiliza sensores de movimiento internos (normalmente acelerómetros y giroscopios) para calcular continuamente la posición, velocidad y orientación de una plataforma en un espacio tridimensional. Al no depender de referencias externas, el INS resulta especialmente valioso en entornos donde se requiere una navegación consistente e ininterrumpida, como aplicaciones submarinas, subterráneas y de defensa de alta dinámica.
¿Cuáles son los componentes principales de un INS?
En mi experiencia diseñando soluciones INS, cada sistema parte de tres componentes esenciales: giroscopios, acelerómetros y un procesador de navegación. Para mejorar la precisión y la estabilidad, solemos integrar sensores adicionales, como receptores GNSS, magnetómetros o altímetros barométricos, para una fusión avanzada de sensores. Esta arquitectura permite al INS mantener un seguimiento de movimiento fiable en entornos diversos y desafiantes.

Giroscopios
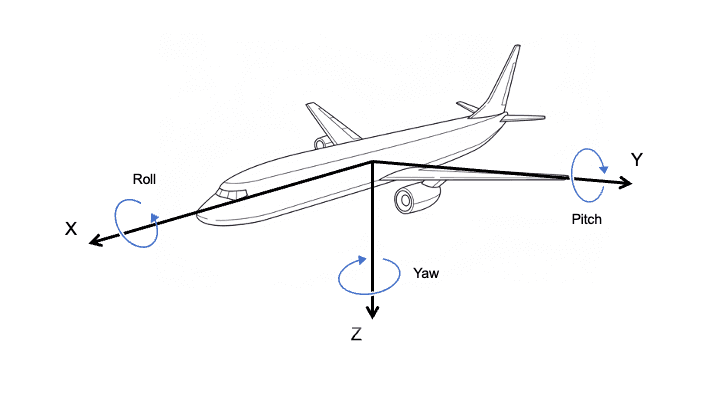
Los giroscopios miden la velocidad angular a lo largo de tres ejes ortogonales (X, Y, Z), lo que proporciona datos esenciales para calcular la orientación: balanceo, cabeceo y guiñada. Los giroscopios MEMS se utilizan ampliamente en aplicaciones compactas, mientras que los FOG (giroscopios de fibra óptica) y los RLG (giroscopios láser de anillo) ofrecen mayor precisión y estabilidad a largo plazo para sistemas tácticos y aeroespaciales.
Acelerómetros
Los acelerómetros miden la aceleración lineal a lo largo de cada eje. Al integrarse a lo largo del tiempo, estos valores producen cambios en la velocidad y el desplazamiento. Los acelerómetros de alto rendimiento con baja inestabilidad de sesgo y bajo nivel de ruido son cruciales para mantener la precisión de la posición a lo largo del tiempo.
Procesador de navegación inercial
El procesador funciona como el núcleo computacional del INS. Fusiona la información de los sensores de movimiento, aplica algoritmos de compensación y filtrado, y genera la posición, la velocidad y la orientación en tiempo real. Muchos sistemas también admiten la integración de sensores externos y el diagnóstico en tiempo real dentro de esta unidad.
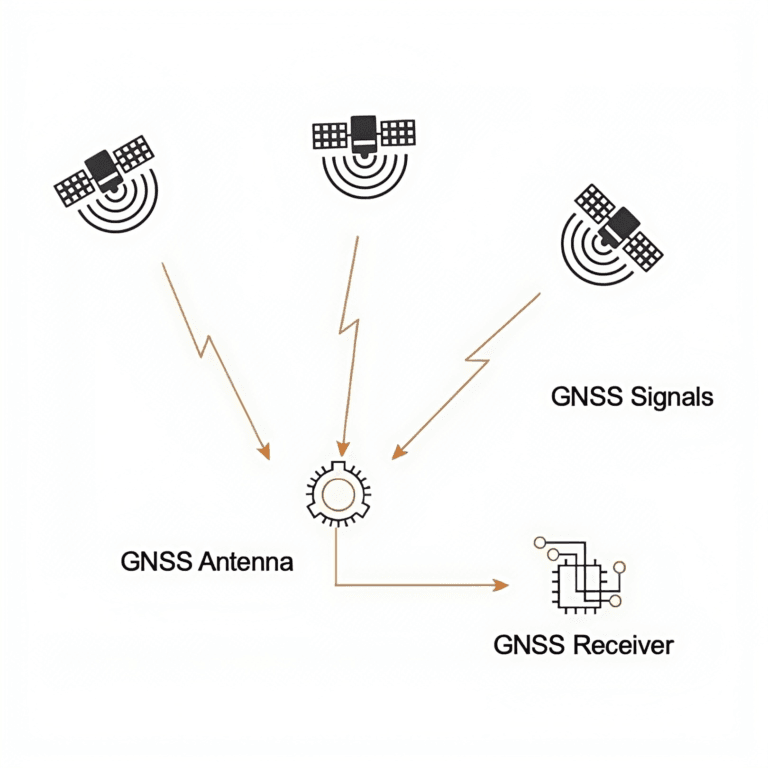
Receptores GNSS
Un número cada vez mayor de soluciones INS integran receptores GNSS para mejorar la precisión a largo plazo y el posicionamiento global. Al combinar mediciones inerciales con datos satelitales, generalmente mediante el filtrado Kalman extendido, estos sistemas híbridos corrigen eficazmente la deriva y ofrecen un rendimiento de navegación robusto en plataformas autónomas, sistemas aeroespaciales y aplicaciones geodésicas.
Magnetómetros
Los magnetómetros ayudan a determinar el rumbo midiendo el campo magnético terrestre. Si bien son menos precisos que las soluciones giroscópicas, proporcionan una referencia absoluta útil, especialmente en aplicaciones de baja dinámica o en interiores.
Altímetros barométricos
Estos sensores proporcionan una estimación de altitud basada en la presión atmosférica. Se utilizan comúnmente en vehículos aéreos no tripulados (UAV), aeronaves y sistemas terrestres que requieren datos de referencia vertical en entornos donde la altitud GNSS puede ser poco fiable.
Juntos, estos componentes forman un sistema de navegación versátil capaz de proporcionar datos de movimiento de alta velocidad en tiempo real, ya sea operando como una unidad inercial pura o como parte de una solución GNSS/INS estrechamente integrada diseñada para entornos complejos y dinámicos.
¿Cuáles son los diferentes tipos de INS: MEMS, FOG y RLG?
Los sistemas de navegación inercial se pueden clasificar ampliamente según el tipo de tecnología de giroscopio que utilizan. La elección de la tecnología determina características clave de rendimiento, como la estabilidad de polarización, el ruido, la deriva y el costo, por lo que es crucial seleccionar el tipo adecuado para su aplicación.
1. MEMS INS (Sistemas Microelectromecánicos)
Los sistemas MEMS INS se construyen con giroscopios y acelerómetros micromecánicos de silicio. Gracias a los avances en la fabricación de semiconductores, estos sistemas se utilizan ampliamente en plataformas compactas donde el tamaño, el peso, la potencia y el coste (SWaP-C) son limitaciones importantes.



2. FOG INS (INS basado en giroscopio de fibra óptica)
El sistema FOG INS se basa en el efecto Sagnac, utilizando fibra óptica enrollada para medir la rotación. Ofrece una estabilidad significativamente mayor, menor deriva y una mejor linealidad del factor de escala que los sistemas MEMS, lo que lo hace ideal para la navegación táctica.


3. RLG INS (INS basado en giroscopio láser de anillo)
RLG INS utiliza interferencia láser en una cavidad de bucle cerrado para detectar la velocidad angular con altísima precisión. Esta arquitectura ofrece una precisión estratégica y se suele implementar en sistemas donde el rendimiento inercial absoluto es crucial.
| Tipo de INS | Ventajas | Limitaciones | Casos de uso típicos |
|---|---|---|---|
| INSTALACIÓN DE MEMS |
|
| Vehículos aéreos no tripulados (UAV), robótica, sistemas portátiles, municiones merodeadoras |
| NIEBLA |
|
| Plataformas aeroespaciales, vehículos de defensa, sistemas marinos |
| RLG INS |
|
| Misiles balísticos, naves espaciales, aviones de alta gama |
¿Cómo funciona el INS?
Al configurar un INS, siempre comienzo definiendo su posición inicial, velocidad y orientación. A partir de ahí, el sistema se basa únicamente en mediciones inerciales para estimar cada estado de movimiento posterior en tiempo real.
1. Medición de la aceleración
El sistema utiliza acelerómetros triaxiales para medir la aceleración lineal en tres direcciones. Estos valores se integran a lo largo del tiempo para calcular la velocidad y luego se vuelven a integrar para calcular los cambios de posición.
2. Medición de la velocidad angular
Los giroscopios miden la velocidad angular a lo largo de los ejes X, Y y Z. Estas lecturas se utilizan para actualizar la orientación del sistema a través de la integración de cuaterniones o ángulos de Euler.
3. Principio de estima
El INS opera mediante navegación a estima, lo que significa que estima el estado actual basándose en el anterior y la información de los sensores. Esto le permite navegar sin referencias externas como el GNSS.
4. Acumulación de errores y deriva
Debido a que integra datos de sensores ruidosos, pequeños sesgos y errores (por ejemplo, inestabilidad de sesgo, error de factor de escala) se acumulan con el tiempo, lo que genera una desviación tanto en la posición como en la orientación.
5. Fusión de sensores y entradas auxiliares
Para minimizar la deriva, el INS suele combinarse con sensores externos como GNSS, registros de velocidad Doppler (DVL), barómetros o magnetómetros. Estas fuentes de ayuda corrigen los errores acumulados y amplían la precisión operativa.
Esta arquitectura permite que el INS ofrezca una navegación autónoma en tiempo real en entornos donde las señales externas son limitadas, interrumpidas o totalmente no disponibles, como durante altas dinámicas o interferencias electromagnéticas.
¿Qué métricas de rendimiento definen la calidad de un INS?
Al seleccionar un sistema de navegación inercial, es fundamental comprender sus parámetros de rendimiento para garantizar que cumpla con los requisitos de la misión. Las siguientes métricas son las más importantes:
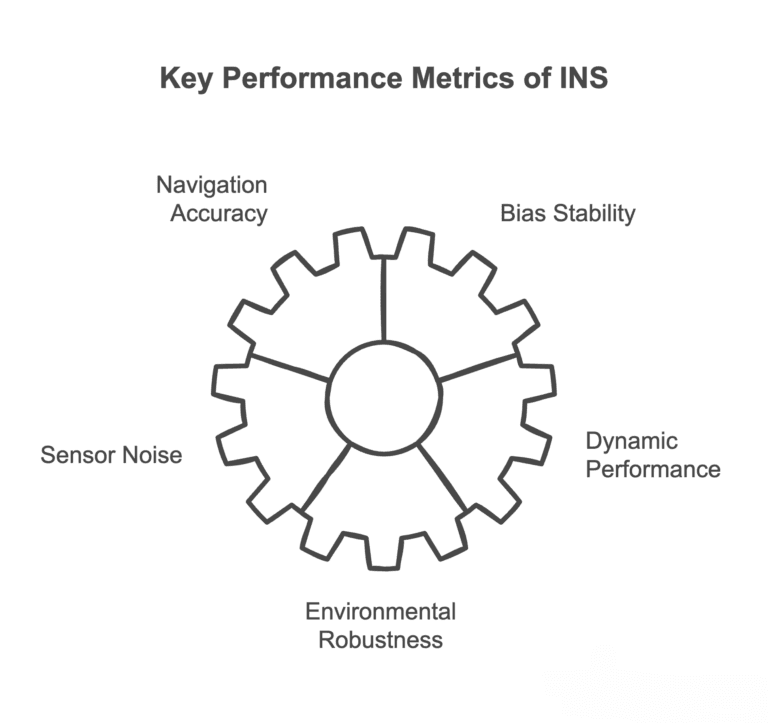
1. Precisión de navegación
La precisión del INS incluye errores de posición, velocidad y actitud que se acumulan con el tiempo. Una alta precisión es crucial para las operaciones en entornos sin GNSS. El Guidenav GFS120A, por ejemplo, ofrece una precisión de rumbo de 0,01° (1σ) , una precisión de balanceo/cabeceo de 0,005° (1σ) y un posicionamiento RTK de <2 cm + 1 ppm , con un error de velocidad de tan solo 0,02 m/s .
2. Estabilidad del sesgo
La estabilidad de polarización refleja la deriva a largo plazo de los giroscopios y acelerómetros, lo que afecta directamente la durabilidad de la navegación. El Guidenav GFS120A presenta una estabilidad de polarización del giroscopio de 0,003°/h y una estabilidad de polarización del acelerómetro inferior a 20 μg , lo que lo hace ideal para aplicaciones autónomas de alta precisión y larga duración.
3. Ruido del sensor (recorrido aleatorio)
El recorrido aleatorio cuantifica el ruido del sensor a corto plazo. Valores bajos de ARW y VRW indican datos más nítidos y estables durante el movimiento.
4. Rendimiento dinámico
La velocidad de actualización, la latencia y el ancho de banda determinan la rapidez con la que el INS responde al movimiento. Un alto rendimiento dinámico es fundamental para vehículos aéreos no tripulados (UAV), robótica y misiles.
5. Robustez ambiental
El INS debe soportar vibraciones, impactos y temperaturas extremas. El cumplimiento de las normas MIL-STD o DO-160 garantiza su fiabilidad en condiciones adversas.
Comprender y comparar estas métricas permite a los integradores elegir el INS adecuado para su plataforma, equilibrando el costo, la precisión y las demandas ambientales.
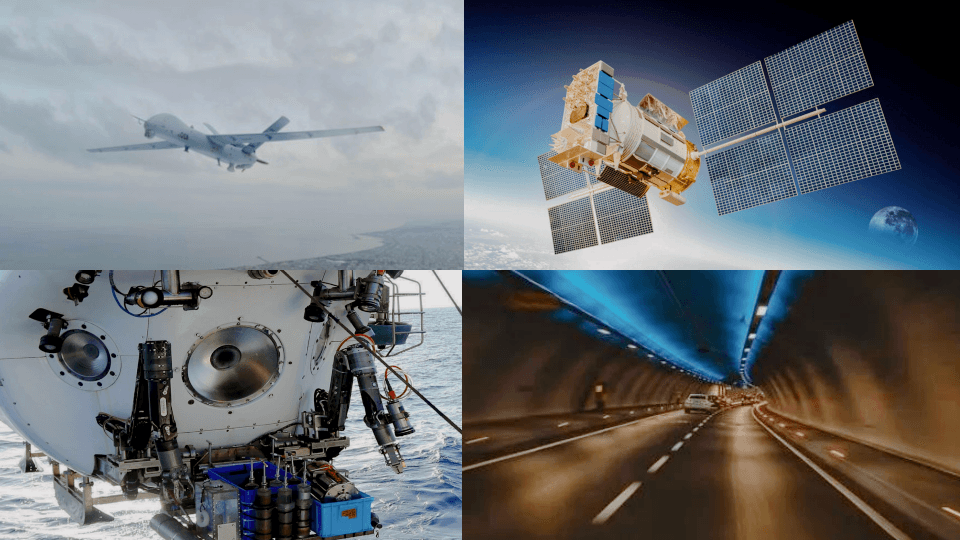
¿Cuáles son las aplicaciones típicas del INS en las distintas industrias?
Los sistemas de navegación inercial (INS) se utilizan ampliamente en las industrias aeroespacial, marítima, de defensa, de sistemas no tripulados, de automatización industrial y subterránea, donde la navegación continua e independiente de la señal es crucial. En el sector aeroespacial, permiten el guiado preciso de aeronaves y misiles; en aplicaciones marítimas, dan soporte a submarinos y vehículos aéreos no tripulados (AUV) donde el GNSS no está disponible. Los sistemas de defensa dependen del INS para la orientación, el control de tiro y la navegación en entornos sin GPS. Las plataformas no tripuladas, como los UAV, los UGV y los UUV, utilizan el INS para el posicionamiento en tiempo real y la fusión de sensores. En robótica industrial, el INS garantiza un control de movimiento preciso para AGV y grúas. En minería y tunelería, el INS permite un posicionamiento subterráneo fiable para maquinaria pesada y sistemas de perforación.
¿Cómo GuideNav lidera la industria de la navegación inercial?
Con más de 15 años de experiencia, GuideNav ofrece soluciones de navegación inercial de alto rendimiento en las que confían integradores de sistemas autónomos, aeroespaciales y de defensa de todo el mundo.
Diversas líneas de productos
Desde MEMS INS compactos para UAV hasta FOG INS de alta precisión para aplicaciones marinas y aeroespaciales, GuideNav cubre una gama completa de perfiles de misión.
Optimizado para SWaP-C
Todos los sistemas están diseñados para ofrecer un tamaño, peso, potencia y rentabilidad ideales para plataformas móviles, integradas y tácticas.
Listo para integración híbrida
Nuestras plataformas INS admiten una fusión perfecta con GNSS, DVL y otros sensores de ayuda a través de interfaces estándar (UART, CAN, Ethernet).
Resistente y probado en campo
Diseñadas para cumplir con la norma MIL-STD-810H, las unidades GuideNav son resistentes a los golpes, tolerantes a las vibraciones y funcionan de manera confiable en entornos hostiles.
GuideNav es el socio preferido de los integradores que buscan sistemas de navegación inercial (INS) avanzados que combinen alta precisión, robustez operativa y total conformidad con las exportaciones para aplicaciones exigentes de defensa, aeroespaciales y autónomas.