En teoría, una Unidad de Medición Inercial (IMU) puede realizar odometría, midiendo la distancia recorrida por un vehículo mediante la integración de su aceleración y velocidad angular a lo largo del tiempo. Sin embargo, en la práctica, esta odometría basada únicamente en la inercia resulta poco viable. El problema radica en la acumulación de errores: incluso pequeñas desviaciones en los sensores provocan una deriva de posición que crece exponencialmente con el tiempo. En cuestión de segundos, la trayectoria calculada se desvía considerablemente de la realidad.
En el caso de la conducción autónoma y la robótica, donde la precisión de localización debe mantenerse en centímetros, una IMU por sí sola no puede proporcionar una odometría confiable.
En teoría, una IMU puede calcular la odometría mediante doble integración, pero el sesgo y el ruido la hacen desviarse exponencialmente con el tiempo. Por lo tanto, los sistemas de navegación reales dependen de la fusión de la IMU con GNSS, LiDAR o cámaras para mantener la precisión y la estabilidad.
La navegación inercial parece sencilla: medir el movimiento y calcular la distancia. Pero en la práctica, incluso los pequeños errores del sensor aumentan rápidamente y afectan la precisión. Una IMU es un componente crucial de todo sistema de navegación, pero no puede funcionar sola. Este artículo explica por qué la odometría con IMU pura falla y cómo la fusión de sensores la transforma en una herramienta fiable para un posicionamiento preciso.

Tabla de contenido
¿Por qué la IMU puede realizar teóricamente la odometría?
Una unidad de medición inercial (IMU) mide la aceleración de tres ejes y la velocidad angular de tres ejes.
Mediante la integración continua de estas señales, el sistema puede calcular teóricamente:
- Orientación (Actitud):mediante la integración de la velocidad angular.
- Velocidad:mediante la integración de la aceleración lineal.
- Posición:integrando la velocidad una vez más.
Este es el principio fundamental del Sistema de Navegación Inercial (INS), un método de navegación autónomo basado exclusivamente en sensores de movimiento. Idealmente, con sensores perfectamente calibrados y sin ruido, una IMU podría determinar continuamente el movimiento de un vehículo y estimar su trayectoria con respecto a su punto de partida. Por eso, en teoría, una IMU puede realizar odometría sin referencia externa.
Por qué falla en la práctica: el problema de la acumulación de errores
Aunque la teoría tiene sentido, toda IMU sufre errores inherentes en los sensores. Estos pequeños sesgos y ruidos se magnifican drásticamente durante el proceso de doble integración, que convierte la aceleración en posición. Con el tiempo, incluso pequeñas imperfecciones causan una deriva importante y de rápido crecimiento.
El error de posición crece cuadráticamente con el tiempo
Si el acelerómetro contiene un pequeño sesgo constante ba (m/s²), los errores acumulados de velocidad y posición aumentan con el tiempo de la siguiente manera:
Esto significa que el error de posición crece proporcionalmente al cuadrado del tiempo. Incluso una pequeña desviación puede provocar una desviación drástica.
Por ejemplo, supongamos que el sesgo del acelerómetro ba 0,01 m/s2 , un valor muy típico para las IMU MEMS de grado comercial.
| Tiempo | Error de posición |
|---|---|
| 1 segundo | 0,005 metros |
| 10 segundos | 0,5 metros |
| 30 segundos | 4,5 metros |
| 60 segundos | 18 metros |
Tras tan solo un minuto (60 s) de funcionamiento, el error de posición estimado puede alcanzar unos 18 metros, lo que supera con creces la precisión de localización requerida para la conducción autónoma (normalmente < 0,1–0,3 m).
El sesgo del giroscopio provoca una desviación de actitud
Un pequeño sesgo del giroscopio puede parecer insignificante, pero con el tiempo provoca errores notables en la estimación de la actitud. Una vez que la orientación se desvía, la IMU ya no puede separar correctamente la gravedad del movimiento real; no logra "eliminar la gravedad" de los datos del acelerómetro. Cuando esto sucede, parte del vector de gravedad se interpreta erróneamente como aceleración horizontal, lo que hace que el sistema crea que el vehículo se está moviendo incluso cuando está parado. Esta falsa aceleración se integra continuamente en una velocidad falsa y, en última instancia, produce una deriva de posición explosiva.
Otras fuentes de error
Más allá del sesgo, las IMU del mundo real se ven afectadas por múltiples fuentes de error que se amplifican con el tiempo:
| Fuente del error | Impacto |
|---|---|
| Error de factor de escala | Escala incorrecta de las mediciones de aceleración o velocidad angular. |
| Desalineación | Los ejes del sensor no ortogonales introducen errores de proyección. |
| Deriva de temperatura | El sesgo cambia con la temperatura, degradando la calibración. |
| Ruido de vibración | El ruido mecánico se integra en la deriva de posición. |
| Error de alineación inicial | Pequeños errores de actitud al iniciar el proyecto provocan desviaciones a largo plazo. |
Incluso pequeñas imperfecciones, al combinarse, provocan que la salida de navegación diverja rápidamente. En la práctica, la odometría inercial pura se vuelve inutilizable en cuestión de segundos, incluso para sensores de alta calidad.
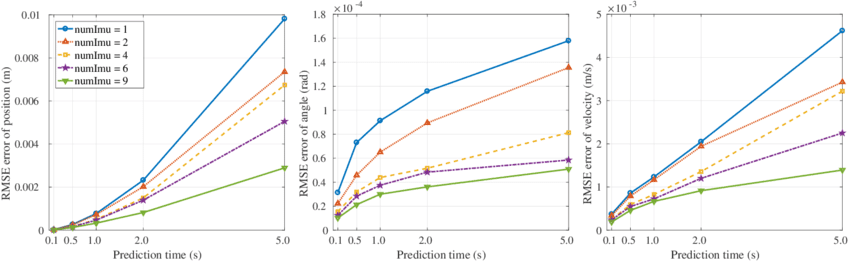
Evaluación de precisión: ¿Cuánto tiempo puede durar la odometría solo con IMU?
Incluso con sensores avanzados, la odometría inercial solo puede mantener la precisión durante un breve periodo antes de descontrolarse. Dado que el error de posición aumenta cuadráticamente con el tiempo, la duración de un funcionamiento fiable depende principalmente de la pendiente de la IMU y de su estabilidad de polarización.
| Grado IMU | Sesgo típico | Error de posición (10 s) | Error de posición (60 s) | Uso práctico |
|---|---|---|---|---|
| Grado de consumo | > 0,01 m/s² | > 0,5 metros | > 18 metros | Completamente inutilizable |
| Grado industrial | ~ 0,001 m/s² | ~ 5 centímetros | ~ 1,8 metros | Utilizable únicamente para pruebas cortas |
| Grado de navegación | < 0,0001 m/s² | ~ 0,5 centímetros | ~ 18 centímetros | Preciso por unos segundos; aún necesita fusión |
| Grado táctico | Extremadamente bajo | Controlable | Pocos metros | Utilizable para fines militares/aeroespaciales; alto costo |
Incluso las IMU de más alta calidad no pueden evitar la deriva indefinidamente. Por eso, los sistemas autónomos modernos siempre recurren a la fusión de sensores —que combina datos de IMU con información GNSS, LiDAR o visual— para mantener la precisión y la estabilidad a largo plazo.
El papel de la IMU en la navegación moderna: la fusión de sensores en el núcleo
Aunque una IMU no puede realizar la odometría de forma independiente, desempeña un papel fundamental en la navegación moderna. En lugar de ser la principal fuente de posicionamiento, actúa como la columna vertebral de alta frecuencia que mejora y estabiliza otros sensores.
Estimación de movimiento de alta frecuencia
Las IMU operan a cientos o miles de hercios, mucho más rápido que GNSS, LiDAR o cámaras.
Esta alta frecuencia de actualización les permite capturar movimientos rápidos y llenar los huecos entre los sensores más lentos, lo que proporciona una percepción del movimiento fluida y continua para todo el sistema de navegación.
Predicción y suavizado a corto plazo
Cuando se pierden las señales GNSS —dentro de túneles, debajo de puentes o en zonas urbanas densamente pobladas— la IMU proporciona una navegación a estima a corto plazo para mantener una trayectoria continua.
Predice el estado del sistema (posición, velocidad, orientación) durante unos segundos, garantizando transiciones suaves hasta que las mediciones externas vuelvan a estar disponibles.
Esta capacidad de puente hace que la IMU sea esencial para una navegación robusta en entornos sin GNSS.
El núcleo de la fusión de sensores
En la localización moderna, la IMU actúa como el núcleo dinámico de los sistemas de fusión multisensor. Sus datos inerciales de alta frecuencia proporcionan información continua sobre el movimiento, mientras que las mediciones de baja frecuencia, pero sin deriva, de otros sensores —como GNSS, LiDAR o cámaras— corrigen constantemente los errores acumulados, manteniendo la navegación estable y precisa.
| Método de fusión | Combinación de sensores | Solicitud |
|---|---|---|
| Acoplamiento flojo o estrecho GNSS/IMU | RTK-GNSS + IMU | Navegación terrestre o aérea de alta precisión |
| Odometría visual-inercial (VIO) | Cámara + IMU | SLAM, vehículos aéreos no tripulados, robótica |
| Odometría inercial LiDAR (LIO) | LiDAR + IMU | Conducción autónoma, cartografía |
| Fusión de gráficos de factores o filtros de Kalman | Múltiples sensores + IMU | Estimación de estado integrada |
Conclusión
En teoría, una IMU por sí sola puede estimar el movimiento, pero en la práctica sus errores aumentan demasiado rápido como para ser útiles. Incluso pequeños sesgos provocan rápidamente una desviación de la posición de varios metros en cuestión de segundos.
Aun así, la IMU sigue siendo esencial: proporciona datos de movimiento de alta frecuencia que otros sensores no pueden. Al combinarse con GNSS, LiDAR o cámaras, se convierte en el núcleo de un sistema de navegación estable y preciso.
