¿Alguna vez intentaste integrar un sistema de navegación, solo para darte cuenta de que no proporciona ninguna posición?
Eso ocurre cuando la gente confunde una IMU con un INS. Suena técnico, pero las consecuencias son reales: malas elecciones de hardware, desperdicio de presupuesto y sistemas que simplemente no funcionan como se espera. ¿La solución? Comprender las diferencias clave entre la IMU y el INS y para qué está diseñado cada uno. Esta guía te lo explicará en un lenguaje sencillo.
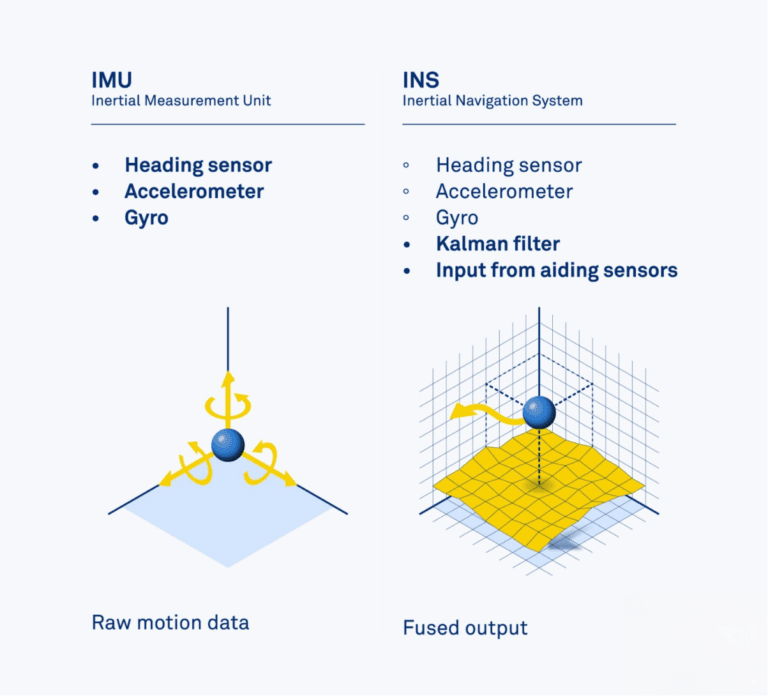
Una IMU mide el movimiento, mientras que un INS utiliza datos de la IMU para calcular la posición y la orientación a lo largo del tiempo: la IMU es un sensor, el INS es un sistema.
Aclaremos la confusión paso a paso.
Tabla de contenido

¿Qué es una IMU?
Una Unidad de Medición Inercial (IMU) es un sensor que mide la aceleración y la velocidad angular . Generalmente construida con tecnologías MEMS, FOG o HRG, una IMU incluye acelerómetros, giroscopios y, en ocasiones, magnetómetros . Genera datos inerciales sin procesar que se utilizan para estimar el movimiento en el espacio. Las IMU se utilizan ampliamente en vehículos aéreos no tripulados (UAV), robótica, vehículos y teléfonos inteligentes. Sin embargo, por sí solas, no proporcionan posición ni orientación , a menos que se integren con procesamiento adicional. La precisión de las IMU varía, desde sensores comerciales de bajo coste hasta sensores tácticos y de navegación como el GMS400 de GuideNav.

¿Qué es un INS?
Un Sistema de Navegación Inercial (INS) es un sistema completo que utiliza datos de la IMU para calcular la posición, la velocidad y la actitud en tiempo real. Generalmente incluye:
- Una IMU integrada
- Un potente procesador integrado
- Algoritmos de fusión de sensores (por ejemplo, filtro de Kalman )
- A menudo, un módulo GNSS para ayudar
El INS integra en tiempo real las salidas de la IMU para proporcionar una solución de navegación continua. Gracias a ello, puede operar incluso en entornos sin GNSS durante un tiempo limitado, lo que lo hace esencial en misiones aeroespaciales, marítimas y autónomas . Sistemas como el GFS120 y el GUIDE2D de GuideNav ejemplifican dicha integración.
¿En qué se diferencian las IMU y los INS?
La mayoría de la gente lo simplifica diciendo: “Un INS es simplemente una IMU con un módulo GNSS”. Técnicamente, es un comienzo, pero está lejos de ser la imagen completa.
Sí, un INS incluye una IMU en su núcleo. Pero también integra un procesador, GNSS (a menudo compatible con RTK o SBAS) y, en ocasiones, sensores externos de asistencia como codificadores de rueda, sensores de velocidad aerodinámica, altímetros barométricos o registros de velocidad Doppler (DVL) . Estas características permiten al INS fusionar datos en tiempo real, proporcionando no solo movimiento, sino también estimaciones de alta fiabilidad de posición, velocidad y orientación.
Piense en una IMU como un termómetro: le proporciona los datos sin procesar. El INS es el informe meteorológico: filtrado, fusionado y listo para actuar.
| Característica | Unidad de medida intramuscular (IMU) | INS |
|---|---|---|
| Función principal | Mide la aceleración y la rotación | Calcula la posición completa, la velocidad y la orientación |
| Componentes | Acelerómetro, giroscopio | IMU + GNSS + Procesador + Sensores opcionales |
| Producción | Datos de movimiento sin procesar | Datos de navegación fusionados (en tiempo real) |
| Soporte GNSS | Ninguno | Integrado (RTK/SBAS opcional) |
| Ayuda externa | No aplicable | Odómetro, DVL, velocidad aerodinámica, altímetro, etc. |
¿Puedes navegar con sólo una IMU?
Imagina una IMU como sentir el movimiento con los ojos cerrados. Puedes sentir que avanzas o giras, pero no tienes ni idea de dónde estás. Eso es lo que ocurre cuando intentas navegar usando solo una IMU.
Claro, se puede integrar la aceleración a lo largo del tiempo para estimar la posición. Pero los pequeños errores se acumulan rápidamente y se convierten en errores graves en cuestión de segundos. Esto se denomina deriva y hace que las IMU independientes sean poco fiables para la navegación.
Son excelentes para la estabilización a corto plazo, como mantener el estabilizador nivelado, pero no para saber dónde estás ni adónde vas. Para eso necesitas un INS.
¿Cómo procesa un INS los datos de una IMU?
A diferencia de una IMU, que solo detecta el movimiento, un INS interpreta ese movimiento y lo transforma en información completa de navegación. Esto incluye saber dónde se encuentra, a qué velocidad se mueve y en qué dirección se orienta. Pero esto no sucede automáticamente. Requiere una cadena de pasos cuidadosamente diseñados, que combinan física, matemáticas y corrección en tiempo real, para convertir las señales sin procesar en una navegación fiable.
Repasemos el proceso:
1. Detección de movimiento (entrada IMU)
Todo comienza con la IMU, que mide continuamente la aceleración (mediante acelerómetros) y la velocidad angular (mediante giroscopios). Estos valores reflejan cómo se mueve el sistema en el espacio tridimensional.
➡ Este paso le otorga al INS su conciencia de movimiento puro.
2. Calcular la velocidad y la posición
El INS integra la aceleración para obtener la velocidad y luego la velocidad para estimar la posición a lo largo del tiempo. Esto le indica al sistema la distancia recorrida desde su punto de partida.
➡ Así es como el INS rastrea el movimiento, incluso sin GPS.
3. Estimación de la orientación
Al procesar datos del giroscopio y hacer referencia a vectores como la gravedad y el campo magnético de la Tierra, el INS determina el balanceo, el cabeceo y la guiñada: su orientación 3D completa.
➡ Este paso ayuda al sistema a comprender cómo se gira o se inclina.
4. Aplicar la fusión de sensores para mayor precisión
Los datos de la IMU por sí solos varían con el tiempo. El INS utiliza algoritmos inteligentes, como los filtros de Kalman, para combinar la información de la IMU con la de otros sensores:
- GNSS/RTK/SBAS
- odómetros de ruedas
- Sensores DVL o de velocidad aerodinámica
- altímetros barométricos
Estas correcciones mejoran drásticamente la precisión y la estabilidad a largo plazo.
➡ Fusion mantiene el sistema confiable, incluso cuando algunos sensores pierden señal.
5. Entregar resultados de navegación en tiempo real
El resultado final es un flujo continuo y en tiempo real de datos de posición, velocidad y actitud, actualizados muchas veces por segundo y listos para ser utilizados por controladores de vuelo, pilotos automáticos o sistemas de mapeo.
➡ Esto es lo que hace del INS una solución de navegación completa.
Los productos INS de GuideNav siguen esta arquitectura, con motores de fusión optimizados para condiciones sin GNSS, entornos dinámicos y plataformas con alta vibración. El resultado: una navegación fiable en la que puede confiar cuando más la necesita.
¿Cuándo es suficiente una IMU para su aplicación?
Una IMU es todo lo que necesitas si tu sistema solo necesita detectar movimiento , no calcular la posición ni el rumbo en el tiempo. Es ideal cuando reaccionas al movimiento, no cuando intentas rastrear la ubicación absoluta.
Los casos de uso comunes incluyen:
Estabilización de la cámara
Detecta vibración o inclinación para ayudar a los motores a mantener la cámara estable.
Seguimiento de gestos
En AR/VR o wearables, se sigue el movimiento, no la posición exacta.
Orientación a corto plazo
Se utiliza en drones o robots durante el arranque, el vuelo estacionario o maniobras rápidas.
Soporte de control de vuelo
Combinadas con GNSS o flujo óptico, las IMU proporcionan retroalimentación rápida para la estabilización del dron.
Ten en cuenta que las IMU solo proporcionan aceleración y rotación. Si necesitas orientación o velocidad, tendrás que calcularlas tú mismo: filtros, corrección de derrape y más.
Si esto está dentro de la capacidad de su sistema, una IMU es una solución liviana, asequible y eficiente
¿Cuándo necesitas realmente un INS completo?
Necesita un INS completo cuando su sistema debe conocer la posición y orientación exactas en todo momento , especialmente en entornos donde GNSS puede fallar o no estar disponible.
Los casos de uso típicos incluyen:
- Entornos sin GNSS: como túneles, interiores, submarinos o cañones urbanos
- Plataformas altamente dinámicas: como drones, misiles y vehículos todoterreno que necesitan actualizaciones rápidas y precisas.
- Estimación: cuando el sistema debe mantener la navegación entre señales GNSS, o sin GNSS en absoluto
- Tareas críticas para la precisión: como el mapeo, la orientación o la conducción autónoma
En estas situaciones, una IMU por sí sola se desviaría rápidamente, lo que generaría resultados poco fiables. Un INS soluciona este problema fusionando datos inerciales con GNSS y sensores opcionales como DVL, odómetros o altímetros.
¿Cuáles son los errores comunes al elegir IMU o INS?
Seamos sinceros: cuando se trata de sensores inerciales, es fácil equivocarse, sobre todo si eres nuevo en el sector. He visto a equipos elegir la herramienta equivocada incontables veces. Y rara vez se trata de la tecnología, sino de no comprender el problema.

Aquí es donde las cosas generalmente se desvían:
Error n.° 1: pensar que una IMU te da posición
No. Una IMU solo te indica la velocidad a la que te mueves o giras. Si esperas coordenadas en tiempo real desde el primer momento, te decepcionarás.
Error n.° 2: utilizar una IMU de nivel básico para un trabajo exigente
Un sensor de bajo costo puede lucir bien en el papel, pero una vez que lo conectas a un dron o robot que se mueve rápidamente, el ruido y la deriva arruinarán tus datos.
Error n.° 3: Pagar por un INS cuando un IMU habría sido suficiente
Si solo necesitas estabilizar una cámara o detectar la orientación básica, un INS completo es excesivo. No resuelvas un problema de $300 con una solución de $3000.
Error n.° 4: Olvidar el entorno del mundo real
Las especificaciones de laboratorio no siempre reflejan el rendimiento en campo. Las altas vibraciones, las temperaturas extremas o las cargas de impacto pueden dañar rápidamente los sensores baratos.
Error n.° 5: subestimar el esfuerzo de integración
Los datos brutos de la IMU no son fáciles de usar. Si no se cuenta con el software, los filtros o los algoritmos adecuados, incluso el mejor sensor no rendirá lo suficiente.
¿Qué soporte ofrece GuideNav para la selección de IMU/INS?
En GuideNav, no solo enviamos sensores, sino que le ayudamos a construir el sistema adecuado . Ofrecemos:
- Consultoría de aplicaciones personalizada
- Adaptación del rendimiento IMU/INS
- Guías de integración para UAV, UGV y sistemas marítimos
- Kits de acceso y evaluación de hojas de datos
- Soporte de ingeniería de respuesta rápida
Ya sea que esté construyendo un UAV de baja potencia o un sistema de navegación sin GNSS, lo ayudamos a elegir entre MEMS IMU, FOG IMU o INS completo en función de su perfil de misión.