Las Unidades de Medición Inercial (IMU) son los caballos de batalla silenciosos de la navegación moderna. Detectan cada movimiento, rotación y aceleración, suministrando datos vitales a vehículos aéreos no tripulados (UAV), barcos, vehículos terrestres y sistemas aeroespaciales. Sin embargo, a pesar de su papel crucial, las IMU a menudo se malinterpretan o se utilizan incorrectamente. Pequeños errores en la etapa de integración pueden derivar en fallas operativas masivas, resultando en deriva, inestabilidad o incluso la pérdida de la misión. Lo cierto es que integrar las IMU no es simplemente cuestión de "conectar y usar". Requiere precisión, disciplina y previsión.
Los errores de integración de IMU pueden afectar la fiabilidad de la navegación. Desde la desalineación y la vibración hasta la calibración deficiente y la excesiva dependencia de la fusión de sensores, los ingenieros suelen repetir los mismos errores. En esta guía, exploramos los 10 errores más comunes en la integración de IMU, explicamos sus consecuencias y ofrecemos soluciones expertas que puede aplicar en sus propios proyectos.
Tabla de contenido
Desalineación durante la instalación
Error:
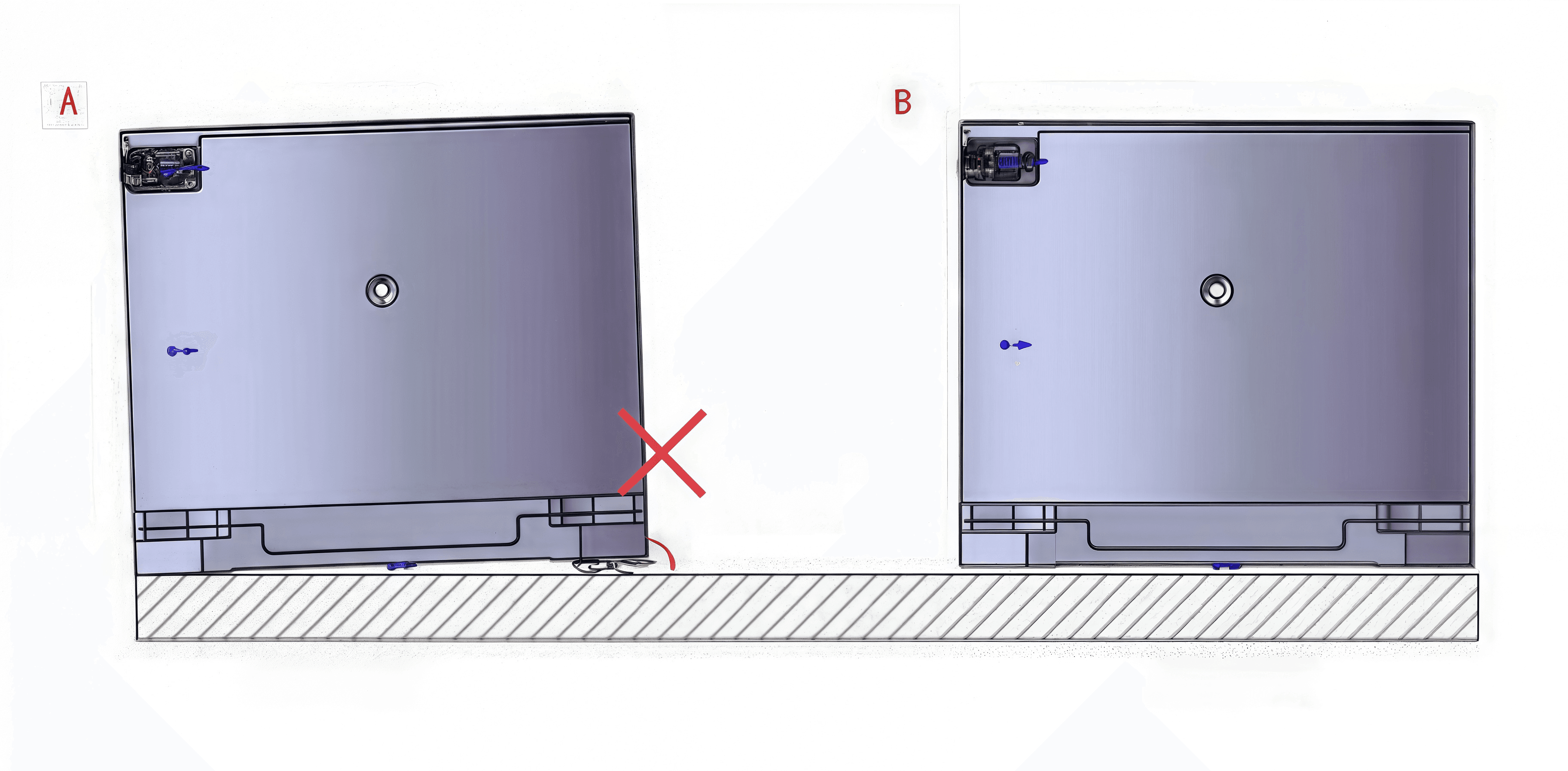
A veces, los ingenieros montan las IMU "suficientemente cerca" del marco de referencia de la plataforma sin una alineación precisa. Unos pocos grados de error pueden parecer insignificantes, pero en navegación, estos desfases se convierten en errores enormes.
Impacto:
Los ejes desalineados causan sesgos sistemáticos en las estimaciones de actitud y velocidad. En misiones largas, esto conlleva una deriva creciente, especialmente en operaciones sin GPS, donde la IMU es la única fuente de información fiable. Un UAV puede desviarse lentamente de su rumbo, o un vehículo robótico puede calcular mal su rumbo.
Arreglar:
Defina siempre los ejes de referencia en CAD y utilice herramientas de precisión, como plantillas de alineación láser, durante la instalación. Tras el montaje, realice una calibración de alineación para medir y compensar pequeños desfases.
Consejo profesional: nunca confíe únicamente en las tolerancias mecánicas: la calibración posterior a la integración es su red de seguridad.
Ignorar el aislamiento de vibraciones
Error:
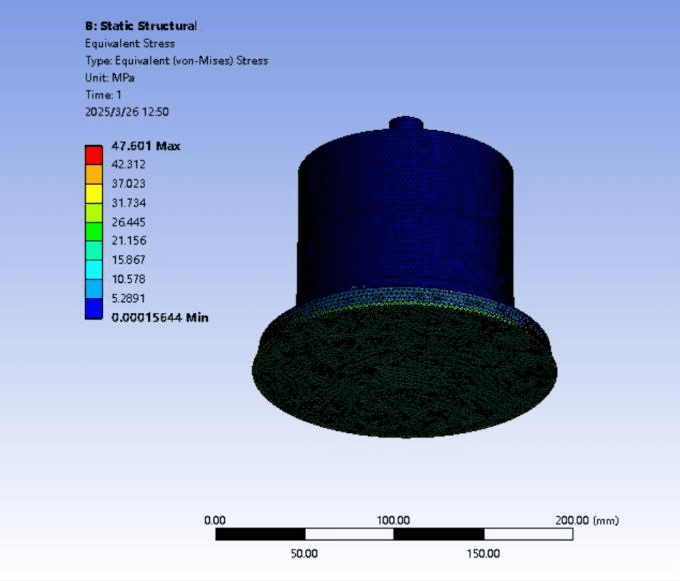
Montar una IMU directamente sobre estructuras vibratorias, como brazos de hélice, motores o chasis de vehículos, asumiendo que los filtros internos del sensor lo compensarán.
Impacto:
La vibración contamina las señales del acelerómetro y crea velocidades angulares falsas en los giroscopios. El resultado son resultados ruidosos, filtros de navegación inestables y fluctuaciones visibles en los sistemas de estabilización. En aeronaves o cardanes, la vibración puede afectar la precisión de apuntamiento.
Arreglar:
Utilice aisladores de vibraciones ajustados a las frecuencias dominantes de su plataforma. Combine la amortiguación de hardware con el filtrado digital para mitigar los efectos residuales. Valide el rendimiento bajo cargas de misión reales, no solo en laboratorios.
Consejo profesional: Realice siempre un análisis del espectro de vibraciones de su plataforma antes de finalizar el diseño del aislamiento.
Pasando por alto la gestión térmica
Error:
Suponiendo que la compensación de temperatura incorporada de la IMU resuelve todos los problemas térmicos.
Impacto:
Las misiones reales implican un calentamiento rápido debido a la electrónica, los gases de escape del motor o las condiciones de enfriamiento. Esto provoca inestabilidad de polarización, deriva del factor de escala y disminución de la precisión. En el espacio, los ciclos térmicos pueden ser catastróficos si no se tienen en cuenta.
Arreglar:
Diseñe el control térmico a nivel de sistema. Las opciones incluyen carcasas aislantes, la adición de disipadores de calor o incluso calentadores controlados. Monitoree los sensores de temperatura a bordo para monitorizar la estabilidad durante todo el perfil de la misión.
Consejo profesional: pruebe las IMU en ciclos térmicos realistas, no solo en puntos de temperatura estáticos.
Elegir el nivel de rendimiento incorrecto
Error:
Seleccionar una IMU basándose únicamente en el costo, el tamaño o la disponibilidad, sin considerar la duración de la misión ni los requisitos de precisión.
Impacto:
Los MEMS de consumo pueden parecer aceptables en pruebas cortas, pero se desviarán de forma incontrolable en situaciones de horas de duración o sin GPS. Los MEMS tácticos o las IMU FOG son necesarios para misiones importantes, pero los equipos suelen omitirlos para reducir el presupuesto, lo que conlleva costosos rediseños posteriores.
Arreglar:
Adapte el rendimiento de la IMU (inestabilidad de polarización, recorrido aleatorio, ancho de banda) a las necesidades de la misión. Utilice MEMS de consumo para drones aficionados, MEMS tácticos para UAVs y vehículos de defensa, y FOG para operaciones marítimas o aeroespaciales.
| Tipo de IMU | Mal uso común | Aplicación correcta |
|---|---|---|
| MEMS de consumo | Elegido por el costo | Robótica corta y no crítica |
| MEMS tácticos | Pasado por alto por el precio | UAVs, UGVs, plataformas de defensa |
| IMU DE NIEBLA | Visto como una exageración | Operaciones marítimas, aeroespaciales y sin GPS |
Consejo profesional: evalúe siempre el costo del ciclo de vida en caso de falla de la misión versus el costo inicial del sensor.
Mala estrategia de calibración
Error:
Confiar únicamente en la calibración del fabricante, asumiendo que es universalmente válida.
Impacto:
Las tolerancias mecánicas, los errores de montaje y las tensiones de los conectores generan sesgos específicos del sistema. Sin una calibración secundaria, estos errores degradan el rendimiento de la navegación y los resultados de la fusión.
Arreglar:
Realice calibraciones a nivel de sistema, como pruebas de seis posiciones o caracterización de tablas de velocidad. Actualice las tablas de calibración en el firmware y repítalas periódicamente para garantizar la consistencia.
Consejo profesional: considere la calibración como un paso de mantenimiento recurrente, no como un proceso único de fábrica.
Interfaz y manejo de datos inadecuados
Error:
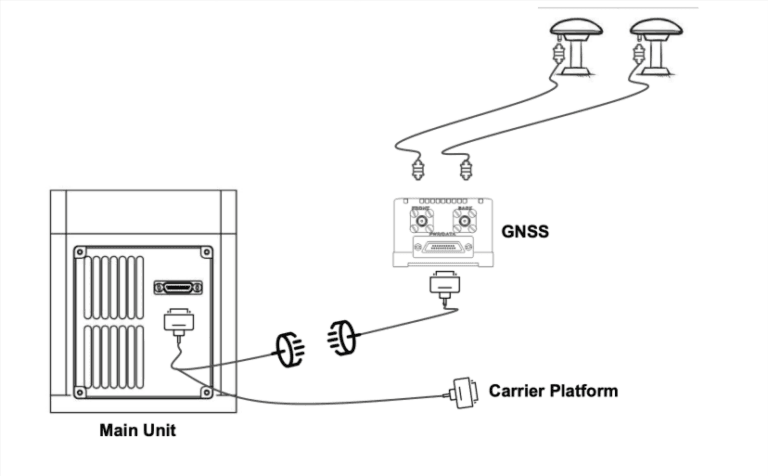
Frecuencias de muestreo mal configuradas, ignorancia de la latencia o falla en la sincronización de datos con otros sensores.
Impacto:
Incluso las IMU de alta calidad pierden fiabilidad si sus datos se retrasan o no están alineados. La fusión con GNSS, LiDAR o visión falla cuando las marcas de tiempo no coinciden.
Arreglar:
Diseñe canales de datos robustos. Utilice PPS o marcas de tiempo de hardware para mantener todo sincronizado. Valide la latencia de extremo a extremo, desde el sensor hasta el procesador.
Consejo profesional: Piense en la sincronización horaria como parte de la calidad del sensor, no como una ocurrencia de último momento.
Ignorar las interferencias magnéticas y EMI
Error:
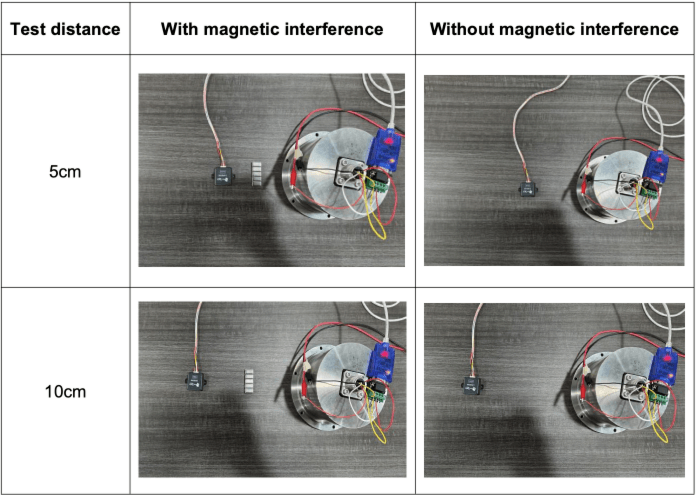
Instalación de IMU cerca de motores, cables de alta corriente o antenas de RF.
Impacto:
Los campos magnéticos distorsionan las señales del acelerómetro y el giroscopio. El ruido EMI se acopla a la electrónica del sensor, causando señales falsas. Esto es especialmente común en los estabilizadores de los UAV, donde los diseños compactos acercan peligrosamente los sensores a los motores.
Arreglar:
Coloque las IMU lejos de fuentes de interferencia electromagnética (EMI). Utilice carcasas blindadas, cableado de par trenzado y prácticas de conexión a tierra. Realice pruebas con carga eléctrica completa para detectar interferencias ocultas.
Consejo profesional: Un diseño mecánico limpio puede resolver los problemas de EMI de manera más efectiva que un filtrado complejo.
No considerar la deriva a largo plazo
Error:
Validación de IMU con pruebas de corta duración, ignorando la deriva a lo largo de horas o días.
Impacto:
La inestabilidad de polarización se acumula, causando kilómetros de error de posición. Los sistemas que dependen únicamente de IMU (submarinos, naves espaciales, vehículos aéreos no tripulados con interferencias GPS) se vuelven inutilizables.
Arreglar:
Realice pruebas de resistencia que simulen la duración de las misiones. Elija IMU tácticas o FOG para lograr estabilidad de navegación a largo plazo.
Consejo profesional: evalúe siempre la deriva durante más de 100 horas, no solo 10 minutos en el laboratorio.
Dependencia excesiva de la fusión de sensores
Error:
Suponiendo que los filtros Kalman o la fusión basada en IA puedan reparar las IMU débiles.
Impacto:
Las entradas deficientes de los sensores simplemente contaminan el filtro. En lugar de mejorar la precisión, la fusión multiplica los errores: «Entra basura, sale basura».
Arreglar:
Comience con datos fiables de la IMU. Fusion debería mejorar el rendimiento, no rescatar sensores defectuosos. Utilice redundancia siempre que sea posible para verificar las señales.
Consejo profesional: una buena IMU reduce la complejidad del filtro y aumenta drásticamente la robustez.
Subestimación de la calificación ambiental
Error:
Probar las IMU solo en condiciones de laboratorio y asumir que los resultados de campo serán los mismos.
Impacto:
La humedad, el polvo, los impactos y las condiciones climáticas extremas superan las especificaciones comerciales. Sin la certificación adecuada, las IMU fallan en misiones críticas.
Arreglar:
Seleccione IMUs probadas según MIL-STD-810G, DO-160 o equivalente. Solicite datos de prueba, no solo las especificaciones de la ficha técnica.
Consejo profesional: Solicite a los proveedores informes de calificación: los datos reales superan las promesas de marketing.
Conclusión
La integración de IMU es tanto un arte como una ciencia. Los algoritmos o sistemas de control más avanzados no pueden compensar una instalación deficiente, una calibración deficiente o pruebas inadecuadas. Al evitar los 10 errores descritos aquí, los ingenieros pueden aprovechar al máximo el potencial de las IMU y construir sistemas que sobrevivan y prosperen en el campo.
En GuideNav , ofrecemos una amplia gama de IMU compuestas por giroscopios MEMS/fibra óptica/mini-fibra óptica de alto rendimiento y acelerómetros MEMS/de cuarzo , todos certificados bajo rigurosos estándares ambientales. Nuestros productos están diseñados para vehículos aéreos no tripulados (UAV), sistemas marítimos, vehículos de defensa y plataformas aeroespaciales donde las fallas son inevitables. Si necesita una IMU lista para la misión, nuestros expertos están listos para ayudarle en su proceso de integración.