Die Temperaturdrift der IMU ist eine hartnäckige Fehlerquelle für Gyroskope: Mit der Temperaturänderung verschiebt sich die Gyroskop-Bias, und eine statische Einheit scheint sich zu drehen. Da sich diese Drift mit der Zeit summiert, können selbst geringe Abweichungen zu signifikanten Lage- oder Kursfehlern bei UAVs, AGVs, Robotern und stabilisierten Plattformen führen. Die effektive Lösung ist systematisch: Die Temperaturdrift der IMU muss durch ein entsprechendes Hardware-Design reduziert, während der Kalibrierung über den gesamten Temperaturbereich charakterisiert und anschließend in Echtzeit kompensiert werden.
Die Temperaturdrift der IMU ist eine Hauptursache für Genauigkeitsverluste in Trägheitssystemen. Durch Hardwareoptimierung, thermische Kalibrierung über den gesamten Messbereich und Online-Kompensation können Ingenieure die Drift deutlich reduzieren und eine stabile Lageregelung gewährleisten.
Die Temperaturdrift von IMUs entsteht durch das physikalische Verhalten von MEMS- und FOG-Bauteilen. Mit Temperaturänderungen verschiebt sich die Messgenauigkeit des Sensors, und ohne Korrektur führt diese Drift zu langfristigen Lagefehlern. Um die Temperaturdrift von IMUs zu beherrschen, ist es notwendig zu verstehen, wie die Temperatur den Sensor beeinflusst, die Drift durch Kalibrierung zu charakterisieren und eine Echtzeitkompensation anzuwenden. Mit geeignetem Hardware-Design, Filterung und Sensorfusion lässt sich diese Drift vorhersagen und vollständig beherrschen.
Inhaltsverzeichnis
Temperaturdrift des Gyroskops verstehen
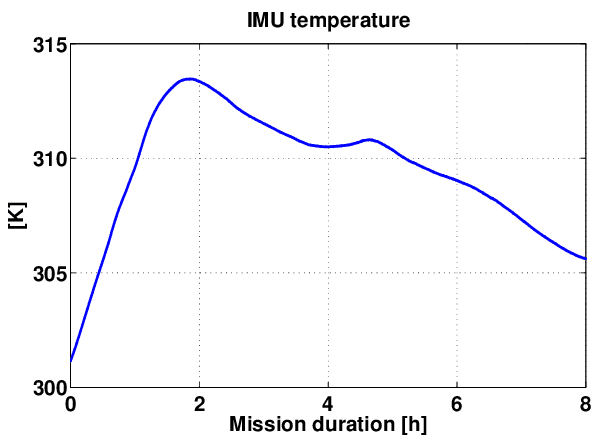
Bevor wir uns mit der Minderung der IMU-Temperaturdrift befassen, ist es wichtig zu verstehen, was dieses Phänomen darstellt. Temperaturdrift ist kein zufälliges Rauschen, sondern eine systematische Änderung der Messgenauigkeit infolge der Schwankungen der internen Sensortemperatur. Da diese Abweichung in die Lagebestimmung einfließt, kann sich die IMU-Temperaturdrift im Dauerbetrieb zu großen Kurs- oder Orientierungsfehlern summieren.
Die Ausgabe eines Gyroskops ist:
Gemessene Winkelgeschwindigkeit = wahre Winkelgeschwindigkeit + Abweichung + Rauschen
Die IMU-Temperaturdrift beschreibt die Änderung des Bias-Terms bei Temperaturänderungen ; dieser Mechanismus unterscheidet sich bei MEMS- und FOG-Gyroskopen.
MEMS -Gyroskope
Die Temperaturdrift von MEMS-basierten IMUs entsteht durch Änderungen des Elastizitätsmoduls, Verschiebungen der Resonanzfrequenz, Dämpfungsänderungen, ASIC-Verstärkungsdrift und Gehäusespannungen. Diese Effekte verursachen häufig signifikante Aufwärmdrift oder Bias-Verschiebungen bei schnellen Temperaturänderungen.
FOG-Gyroskope
FOG-Geräte weisen eine geringere IMU-Temperaturdrift auf, werden aber dennoch von optischen Phasenvariationen, Wellenlängenverschiebungen der Lichtquelle, der Ausdehnung der Faserspule und thermischer Belastung beeinflusst. Ihre Drift verläuft zwar gleichmäßiger, muss aber dennoch modelliert und kompensiert werden.
Warum Drift zu einem schwerwiegenden Einstellungsfehler wird
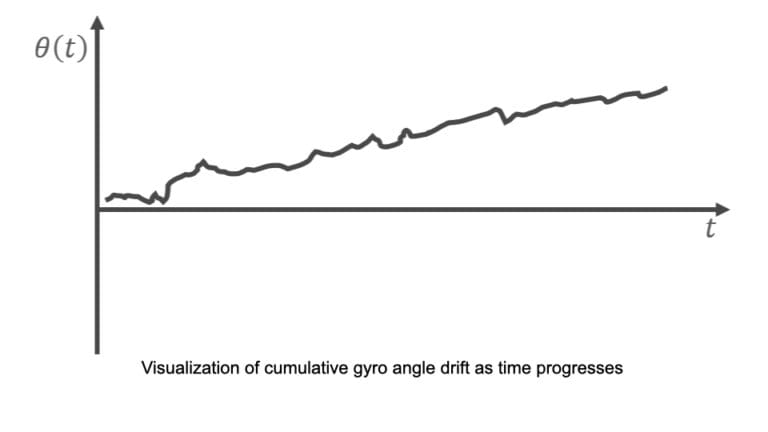
Auch wenn die Temperaturdrift im Moment ihres Auftretens gering erscheinen mag, wird ihr Einfluss gravierend, sobald sie in die Lagebestimmung einfließt. Gyroskope messen die Winkelgeschwindigkeit, und die Lage wird durch Integration dieser Geschwindigkeit über die Zeit ermittelt. Jede unkorrigierte Abweichung – egal wie gering – akkumuliert sich und führt bei längerem Betrieb zu zunehmenden Fehlern in Roll-, Nick- und insbesondere Kursrichtung.
Die Gyro-Abweichung wird über die Zeit integriert:
Lagefehler ≈ ∫ Bias × Zeit
Deshalb kann eine scheinbar geringfügige Abweichung von beispielsweise 0,01 °/s innerhalb von Minuten einen Orientierungsfehler von mehreren Grad verursachen. Je länger die Mission dauert und je weniger externe Referenzen zur Verfügung stehen, desto stärker beeinflusst die Temperaturdrift die Gesamtgenauigkeit der Navigation.
Drei zentrale technische Methoden zur Minderung der Temperaturdrift
Die Minimierung der Temperaturdrift von Gyroskopen erfordert einen mehrstufigen technischen Ansatz, der das Problem an der Wurzel packt, es unter kontrollierten Bedingungen modelliert und es während des Betriebs kontinuierlich korrigiert. Ingenieure wenden typischerweise drei sich ergänzende Methoden : Hardwareoptimierung, Offline-Wärmekalibrierung und Online-Echtzeitkompensation.
(1) Hardwareoptimierung: Reduzierung der Drift an der Quelle
Verbesserungen auf Hardwareebene beeinflussen die Stabilität des Gyroskops maßgeblich. Effektive Strategien umfassen die Auswahl von Sensoren mit niedrigem Temperaturkoeffizienten, die Verwendung thermisch stabiler Strukturmaterialien, die Einhaltung symmetrischer Layouts und die Optimierung des internen Wärmeflusses. Hochwertige IMUs können zudem ein Heizelement oder ein Temperaturregelungsmodul integrieren, um den Sensor auf einer stabilen Betriebstemperatur zu halten und so die intrinsische Drift zu minimieren.
(2) Offline-Temperaturkalibrierung: Aufbau eines Bias-Temperatur-Modells
Während der Fertigung wird die IMU in eine Temperaturkammer eingebracht und über ihren gesamten Betriebstemperaturbereich (z. B. −40 °C bis +85 °C) getestet. An jedem Temperaturpunkt werden die Abweichungswerte erfasst und anschließend in ein Kompensationsmodell – linear, polynomial oder stückweise – eingepasst. Die Modellkoeffizienten werden in der Firmware gespeichert und bilden die Grundlage für eine präzise Echtzeitkorrektur.
(3) Online-Kompensation: Driftkorrektur in Echtzeit
Mit einem etablierten Bias-Temperatur-Modell kompensiert die IMU die Drift im Betrieb. Ein Temperatursensor in der Nähe des Gyro-Kerns liefert Echtzeit-Temperaturmesswerte. Die Firmware berechnet den erwarteten Bias mithilfe des Modells, und dieser Bias wird von den Rohmesswerten subtrahiert. Dadurch wird die durch Aufwärmen, interne Erwärmung und Umgebungstemperaturänderungen verursachte Drift ausgeglichen.

Über die Kompensation hinaus: Filter und Sensorfusion für Langzeitstabilität
Selbst bei robustem Hardware-Design, präziser Kalibrierung und Echtzeitkompensation bleibt stets eine geringe Restdrift bestehen. Über lange Betriebszeiten können sich diese Restfehler akkumulieren, weshalb Hochleistungssysteme zur Stabilisierung Filterung und Sensorfusion einsetzen.
Filtertechniken
Tiefpass- oder adaptive Filter stabilisieren die Bias-Schätzung und dämpfen verrauschte Temperaturübergänge. Statische Detektionsverfahren ermöglichen es dem System, die Bias-Schätzungen zu aktualisieren, sobald die IMU stillsteht, wodurch die Langzeitstabilität weiter verbessert wird.
Sensorfusion
Fusionsalgorithmen nutzen externe Referenzen, um die akkumulierte Drift zu unterdrücken. Typische Hilfsquellen sind Beschleunigungsmesser zur gravitationsbasierten Nick-/Rollkorrektur, Magnetometer oder GNSS zur Kursstabilisierung sowie Odometrie, Bildverarbeitung oder LiDAR für die Navigation über längere Strecken. Die EKF/UKF-basierte Fusion verankert das System an absoluten Referenzen und verhindert so, dass temperaturbedingte Drift die Leistung beeinträchtigt.

Die richtige IMU auswählen: MEMS vs. FOG
Die frühzeitige Auswahl des richtigen IMU ist eine der effektivsten Methoden, um spätere Einschränkungen durch Temperaturdrift zu vermeiden. MEMS-IMUs eignen sich ideal, wenn geringe Größe, niedriger Stromverbrauch und Kosteneffizienz Priorität haben und externe Unterstützung verfügbar ist. Sie funktionieren gut für kurze bis mittlere Missionsdauern und moderate Umgebungsbedingungen.
FOG-IMUs sind die bessere Wahl, wenn Langzeitstabilität, hohe Kursgenauigkeit oder große Temperaturschwankungen erwartet werden. Sie eignen sich besonders für Missionen, die nicht auf GNSS oder andere externe Korrekturen angewiesen sind.
Einfache Richtlinie:
- Wenn Ihr System auf Fusion angewiesen ist und einen geringen SWaP-Wert benötigt → wählen Sie MEMS.
- Wenn Ihr System eine akkumulierte Drift nicht toleriert → wählen Sie FOG.

Aufbau eines stabilen Systems mit der richtigen GuideNav IMU
Die Temperaturdrift der IMU lässt sich durch geeignete technische Maßnahmen beherrschen: Hardwareoptimierung, Temperaturkalibrierung, Echtzeitkompensation, Filterung und Sensorfusion. Mit diesen Maßnahmen können UAVs, AGVs, Roboter und Verteidigungssysteme auch unter anspruchsvollen thermischen Bedingungen eine stabile Leistung erbringen.
GuideNav bietet IMUs mit hoher thermischer Stabilität, sorgfältig entwickelten Kalibrierungsabläufen und zuverlässigen Kompensationsalgorithmen. Die Auswahl einer GuideNav-IMU, die Ihren Betriebsumgebungen und Genauigkeitsanforderungen entspricht, gewährleistet eine solide thermische Basis für Ihr System – minimiert die Temperaturdrift der IMU und verbessert die Langzeitstabilität.
