Bevor ein UAV oder eine unbemannte Plattform seine Mission beginnt, muss sich sein Trägheitsnavigationssystem an die Umgebung anpassen. Ohne ordnungsgemäße Initialisierung kann selbst das beste Glasfaser-INS keine zuverlässigen Kurs-, Lage- oder Positionsdaten liefern. Der Vorgang kann zwar nur wenige Minuten dauern, doch die Navigationsinitialisierung ist die Grundlage für den Missionserfolg.
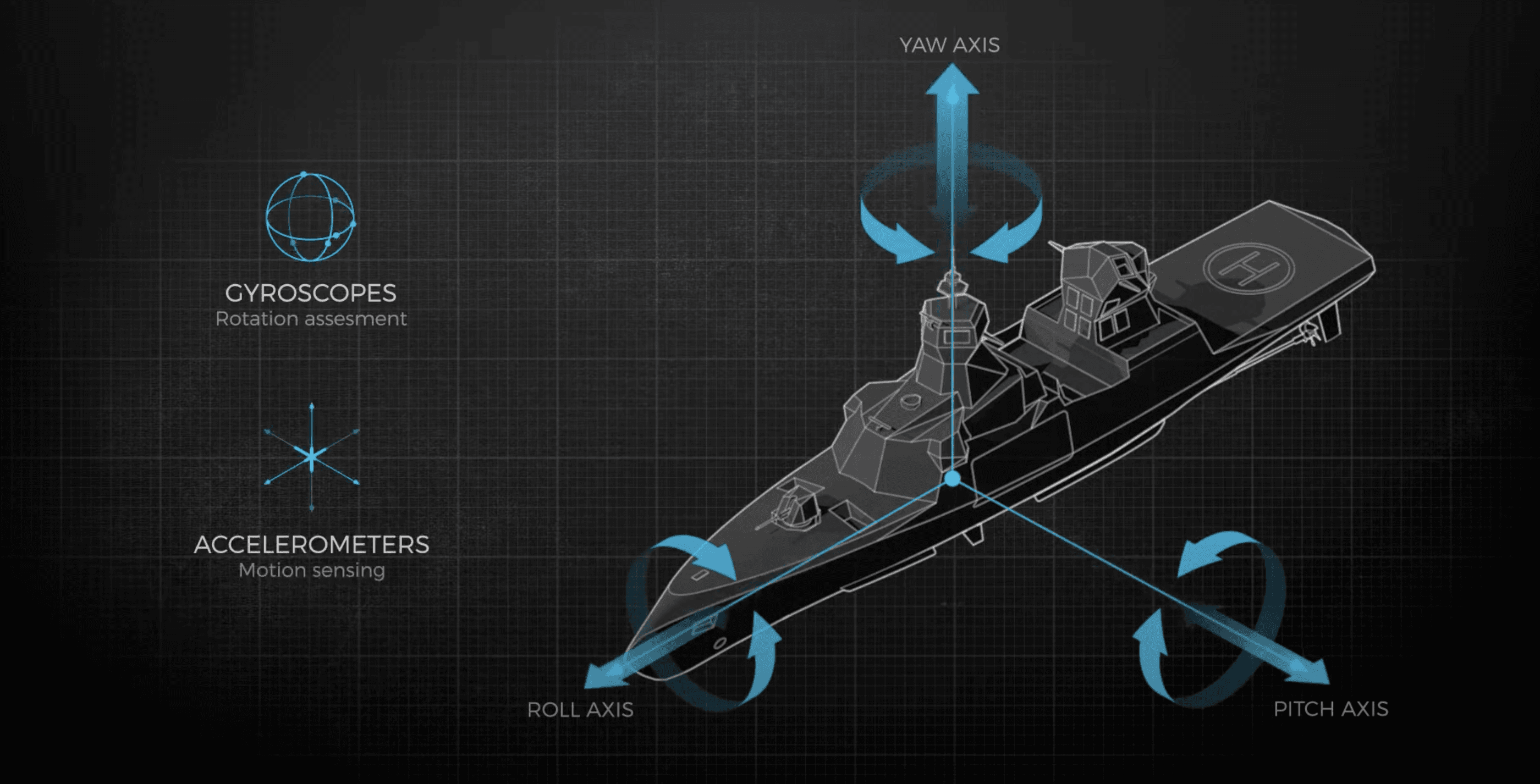
Ein Glasfaser-INS wird vor dem Start initialisiert, indem es die Temperatur stabilisiert, Gyroskope und Beschleunigungsmesser ausrichtet, die Abweichung schätzt und eine grobe bis feine Lageausrichtung durchführt – wodurch eine genaue Navigation ab der ersten Flugsekunde gewährleistet wird.
Die Initialisierung wird oft unterschätzt, entscheidet aber darüber, ob die Navigationsdaten von Anfang an korrekt sind oder von Anfang an abweichen. Bei UAVs und anderen autonomen Plattformen umfasst das Verfahren die thermische Konditionierung, die Bias-Kalibrierung und die Lageausrichtung . Jeder Schritt stellt sicher, dass das INS einsatzbereit ist, bevor sich Triebwerke oder Rotoren überhaupt zu drehen beginnen.
Inhaltsverzeichnis
Warum steht die Temperaturstabilisierung an erster Stelle?
Bevor mit der Ausrichtung begonnen werden kann, muss ein Glasfaser-INS zunächst das thermische Gleichgewicht . Dieser Schritt ist entscheidend, da Temperaturschwankungen die Sensorvorspannung und den Skalierungsfaktor direkt beeinflussen. Wird dieser Schritt übersprungen, ist eine fehlerhafte Initialisierung fast garantiert.
- Gyroskope und Beschleunigungssensoren sind sehr temperaturempfindlich → schon kleine Abweichungen können die Messwerte verfälschen.
- Aufwärmphase ist erforderlich → das System benötigt Zeit zur Stabilisierung, bevor zuverlässige Daten erzeugt werden können.
- Ohne Stabilisierung kann sich die Bias-Drift verzehnfachen → was zu einer Verschlechterung der Ausrichtungsqualität führt.
- Best Practice: 10–20 Minuten vor Abflug einschalten → Sicherstellen, dass das INS von einer stabilen Grundlinie aus startet.
Wie werden Verzerrungen während der Initialisierung geschätzt?
Sobald das INS eingeschaltet und stillgehalten wird, misst es die Signale seiner Gyroskope und Beschleunigungssensoren. Diese Messwerte dienen zur Schätzung des statischen Bias , der den inhärenten Fehler des Sensors bei fehlender Bewegung darstellt. Selbst kleinste Abweichungen können sich, wenn sie nicht korrigiert werden, zu großen Navigationsfehlern summieren. Durch Mittelung und Modellierung der Signale in dieser Phase beginnt das INS mit der Feinausrichtung und liefert saubere, zuverlässige Daten.
Was passiert bei der Grobausrichtung?
Nach der thermischen Stabilisierung und der Bias-Schätzung beginnt das faseroptische INS mit der Grobausrichtung . In dieser Phase strebt das System noch keine vollständige Präzision an, sondern konzentriert sich auf die Erstellung einer zuverlässigen ersten Schätzung seiner Ausrichtung. Anhand natürlicher Referenzwerte – Schwerkraft und Erdrotation – kann das INS eine Basislinie für Nick-, Roll- und Kursbewegungen festlegen. Dieser Prozess ist von grundlegender Bedeutung, da die Feinausrichtung ohne eine solide Grobausrichtung nicht korrekt konvergieren kann .
- Die Schwerkraft von Beschleunigungsmessern → sorgt für Nick- und Rollbewegungen.
- Erdrotation durch Gyroskope → liefert Kurs.
- Der Vorgang dauert mehrere Minuten → und liefert eine ungefähre Grundlinie der Fluglage.
- Diese Basislinie wird dann später verfeinert → und bildet die Grundlage für die Feinausrichtung.
Wie wird eine Feinausrichtung erreicht?
Sobald die Grobausrichtung einen Ausgangspunkt bietet, geht das System zur Feinausrichtung , bei der die Präzision schrittweise verbessert wird. In dieser Phase wendet das Glasfaser-INS erweiterte Filter – oft einen Kalman-Filter – an, um Sensorausgaben zu kombinieren und Restfehler zu reduzieren. Die Feinausrichtung verfeinert kontinuierlich Kurs, Neigung und Rollwinkel und verringert so kleine Abweichungen, die nach der Grobausrichtung verbleiben. Mit jedem Zyklus nähert sich das INS der Navigationsgenauigkeit an und stellt sicher, dass die Ausrichtung des UAV stabil und zuverlässig ist, wenn es schließlich seine Mission beginnt.
Warum muss das INS stationär bleiben?
Während der Initialisierung muss das INS natürliche Referenzsignale – Schwerkraft und Erdrotation – von tatsächlichen Plattformbewegungen trennen. Bewegt sich das UAV während dieses Vorgangs, werden die Sensorwerte verfälscht, was zu ungenauen Bias-Schätzungen und falscher Ausrichtung führt. Um eine zuverlässige Initialisierung zu gewährleisten, ist es daher entscheidend, das System absolut ruhig zu halten.
Wichtige Punkte, die Sie sich merken sollten:
- Durch Bewegungen werden falsche Signale erzeugt , die das System möglicherweise als Teil der Ausrichtung fehlinterpretiert.
- Stationäre Bedingungen ermöglichen eine echte Bias-Schätzung und erzeugen ein saubereres Modell für die Driftkorrektur.
- Jede Vibration oder Bewegung kann die Initialisierung verzögern oder beschädigen und längere Konvergenzzeiten erzwingen.
Wie verbessern GNSS-Hilfsmittel die Initialisierung?
GNSS kann den Ausrichtungsprozess durch die Bereitstellung absoluter Positions- und Geschwindigkeitsinformationen erheblich beschleunigen. In Kombination mit einem Glasfaser-INS verkürzen diese externen Daten die Zeit, die zum Erreichen der vollständigen Navigationsgenauigkeit benötigt wird.
| Mit GNSS-Unterstützung | Ohne GNSS-Unterstützung |
|---|---|
| Die Ausrichtung erfolgt viel schneller, oft in wenigen Minuten. | Die Ausrichtung beruht ausschließlich auf Trägheitssensoren, die Stabilisierung dauert länger. |
| Die Kursgenauigkeit verbessert sich schnell, insbesondere bei der Feinausrichtung. | Kursfehler können größer bleiben, bis genügend Zeit vergangen ist. |
| Ideal für UAV-Missionen mit schneller Bereitstellung. | Geeignet für GNSS-freie Operationen, erfordert aber Geduld. |
Welche Risiken birgt eine schlechte Initialisierung?
Bei fehlerhafter Initialisierung schleichen sich von Anfang an Fehler in die Navigationslösung ein. Diese Probleme bleiben zunächst verborgen, können aber die Missionsleistung erheblich beeinträchtigen, sobald das UAV in der Luft ist.
- Kursfehler → führen zu falschen Navigationspfaden und kumulativer Drift.
- Routenabweichungen → UAVs können von geplanten Fluglinien abweichen, was häufige Korrekturen erforderlich macht.
- Abhängigkeit von GNSS → schwächt die Zuverlässigkeit in Umgebungen ohne GNSS.
- Längere Konvergenzzeiten → Verschwendung von Betriebszeit und Energie.
- Geringeres Vertrauen → Bediener können der Navigationslösung nicht vollständig vertrauen.
Der letzte Schritt vor dem Flug
Stellen Sie sich die Fluginitialisierung wie den leisen Countdown vor dem Start einer Rakete vor. Draußen passiert nichts Aufsehenerregendes, doch jeder Sensor, jeder Algorithmus und jede Schaltung im Glasfaser-INS arbeitet sich an seinem Platz. Überspringt man den Countdown, riskiert man einen Fehlstart. Respektiert man ihn, kann die Mission mit Zuversicht beginnen.
Für UAV-Betreiber bedeutet dies, dass sie beim Aufwärmen, bei der Bias-Abschätzung oder bei der Ausrichtung nichts überstürzen sollten. Jeder Schritt ist für das Auge unsichtbar, aber entscheidend für die Genauigkeit in der Luft. Der Vorteil ist einfach: weniger Überraschungen, schnellere Konvergenz und ein Navigationssystem, auf das Sie sich verlassen können, wenn GNSS nicht verfügbar ist.
Bei GuideNav entwickeln wir unsere Glasfaser-INS-Einheiten so, dass sie diese Disziplin mit schnellem Aufwärmen, robusten Selbsttests und zuverlässigen Ausrichtungsalgorithmen . Befolgen Sie die richtigen Schritte und kombinieren Sie sie mit der richtigen Technologie, dann hebt Ihr UAV immer ab und ist bereit für die bevorstehenden Herausforderungen.
