In meiner Arbeit, die Navigationssysteme entwickelt, habe ich festgestellt, dass echte Zuverlässigkeit aus der Unabhängigkeit stammt - nicht aus der Abhängigkeit von externen Signalen. Aus diesem Grund spielen Trägheitsnavigationssysteme (INS) eine so entscheidende Rolle: Sie arbeiten ausschließlich mit internen Messungen und bieten eine konsistente und kontinuierliche Navigation in einer Vielzahl von Umgebungen, von autonomen Fahrzeugen bis hin zu Luft- und Raumfahrtplattformen.
Ein Trägheitsnavigationssystem (INS) bestimmt die Position, Geschwindigkeit und Orientierung nur mit internen Bewegungssensoren und ermöglicht eine präzise Navigation über eine Vielzahl von Anwendungen hinweg-einschließlich autonomer Systeme, Unterwasserplattformen und missionskritischer Verteidigungsoperationen.
Vor der Auswahl einer INS für Ihre Anwendung hilft es, ein klares Verständnis der Arbeitsprinzipien und der Systemtypen aufzubauen.
Inhaltsverzeichnis

Was ist ein Trägheitsnavigationssystem (INS)?
Ein Trägheitsnavigationssystem (INS) ist ein in sich geschlossenes System, das interne Bewegungssensoren verwendet-typisch beschleunigte und gyroskope-, um die Position, Geschwindigkeit und Orientierung einer Plattform im dreidimensionalen Raum kontinuierlich zu berechnen. Da es sich nicht auf externe Referenzen beruht, ist INS in Umgebungen, in denen eine konsistente, ununterbrochene Navigation erforderlich ist, einschließlich Unterwasser-, Untergrund- und hochdynamischer Verteidigungsanwendungen, besonders wertvoll.
Was sind die Kernkomponenten eines Ins?
Nach meiner Erfahrung beim Entwerfen von Ins -Lösungen beginnt jedes System mit drei wesentlichen Komponenten: Gyroskope, Beschleunigungsmesser und Navigationsprozessor. Um die Genauigkeit und Stabilität zu verbessern, integrieren wir häufig zusätzliche Sensoren - wie GNSS -Empfänger, Magnetometer oder barometrische Höhenmesser - für fortgeschrittene Sensorfusion. Diese Architektur ermöglicht es dem INS, zuverlässige Bewegungsverfolgung in verschiedenen und herausfordernden Umgebungen aufrechtzuerhalten.

Gyroskope
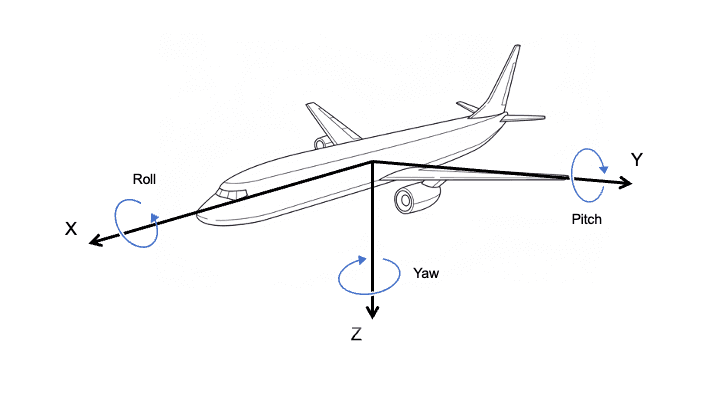
Gyroskope messen die Winkelgeschwindigkeit entlang von drei orthogonalen Achsen (x, y, z) und liefern wesentliche Daten für die Rechenausrichtung - Roll, Tonhöhe und Gier. MEMS-Gyroskope werden häufig für kompakte Anwendungen verwendet, während Nebel (Faser-Optik-Gyroskope) und RLG (Ringlaser-Gyroskope) eine höhere Präzision und Langzeitstabilität für taktische und Luft- und Raumfahrtqualitätssysteme bieten.
Beschleunigungsmesser
Beschleunigungsmesser messen lineare Beschleunigung entlang jeder Achse. Wenn diese Werte im Laufe der Zeit integriert sind, ergeben sie Änderungen der Geschwindigkeit und Verschiebung. Hochleistungsbeschleunigungsmesser mit geringer Verzerrung und niedrigem Rauschen sind für die Aufrechterhaltung der Positionsgenauigkeit im Laufe der Zeit von entscheidender Bedeutung.
Trägheit der Navigationsprozessor
Der Prozessor dient als Computerkern der Ins. Es verschmilzt die Eingabe von Bewegungssensoren, wendet Kompensationsalgorithmen und Filterung an und gibt Position, Geschwindigkeit und Orientierung in Echtzeit aus. Viele Systeme unterstützen auch die Integration der externen Sensoren und die Echtzeitdiagnostik in dieser Einheit.
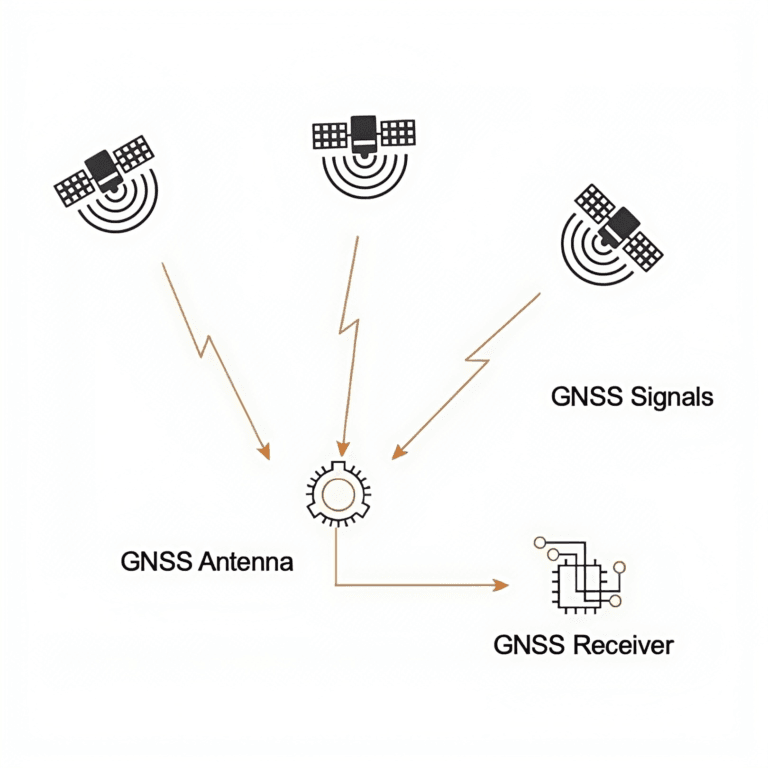
GNSS -Empfänger
Eine zunehmende Anzahl von INS-Lösungen integriert nun GNSS-Empfänger, um die langfristige Genauigkeit und die globale Positionierung zu verbessern. Durch die Kombination von Trägheitsmessungen mit Satellitendaten-Typen durch erweiterte Kalmanfilterung-korrigieren diese hybriden Systeme die Drift und liefern eine robuste Navigationsleistung über autonome Plattformen, Luft- und Raumfahrtsysteme und geodätische Anwendungen hinweg effektiv.
Magnetometer
Magnetometer helfen bei der Bestimmung der Überschrift durch Messung des Erdmagnetfeldes der Erde. Obwohl sie weniger genau als gyroskopische Lösungen haben, liefern sie eine nützliche absolute Referenz-insbesondere in niedrig-dynamischen oder innentorischen Anwendungen.
Barometrische Höhenmesser
Diese Sensoren liefern eine Höhenschätzung basierend auf dem atmosphärischen Druck. Sie werden üblicherweise in UAVs, Flugzeugen und Bodensystemen verwendet, die vertikale Referenzdaten in Umgebungen erfordern, in denen die GNSS -Höhe unzuverlässig sein kann.
Zusammen bilden diese Komponenten ein vielseitiges Navigationssystem, das hochrate Echtzeit-Bewegungsdaten liefern kann-ob als reine Trägheitseinheit oder als Teil einer eng integrierten GNSS/INS-Lösung für komplexe, dynamische Umgebungen ausgelegt wird.
Was sind die verschiedenen Arten von Ins: MEMs, Nebel und RLG?
Inertiale Navigationssysteme Art der Gyroskop -Technologie, weitgehend kategorisiert werden . Die Auswahl der Technologie bestimmt wichtige Leistungsmerkmale wie Vorspannungsstabilität, Rauschen, Drift und Kosten. Damit ist es wichtig, den richtigen Typ für Ihre Anwendung auszuwählen.
1. MEMS INS (mikroelektro-mechanische Systeme)
MEMS INS wird unter Verwendung von mikromechanischen Gyroskopen und Beschleunigern auf Siliziumbasis gebaut. Dank der Fortschritte bei der Herstellung von Halbleiter sind diese Systeme jetzt in kompakten Plattformen weit verbreitet, auf denen Größe, Gewicht, Leistung und Kosten (SWAP-C) wesentliche Einschränkungen sind.



2. Nebel-INS (Faser-Gyroskop-basierte INS)
Nebel -INS stützt sich auf den Sagnac -Effekt unter Verwendung von Coiled -Faser -Optik zur Messung der Rotation. Es bietet eine signifikant höhere Stabilität, eine geringere Drift und eine bessere Linearität des Skalierungsfaktors als MEMS-Systeme, wodurch es ideal für die navigation der taktischen Qualität ist.


3..
RLG INS verwendet Laserinterferenz in einer Höhle mit geschlossenem Kreislauf, um die Winkelgeschwindigkeit mit extrem hoher Präzision zu erkennen. Diese Architektur liefert eine strategische Genauigkeit und wird in der Regel in Systemen eingesetzt, in denen die absolute Trägheitsleistung von entscheidender Bedeutung ist.
| Ins Typ | Vorteile | Einschränkungen | Typische Anwendungsfälle |
|---|---|---|---|
| MEMS INS |
|
| UAVs, Robotik, tragbare Systeme, herumlungernde Munition |
| NEBEL INS |
|
| Luft- und Raumfahrtplattformen, Verteidigungsfahrzeuge, Meeressysteme |
| RLG Ins |
|
| Ballistische Raketen, Raumfahrzeuge, High-End-Flugzeuge |
Wie funktioniert INS?
Bei der Konfiguration eines INS beginne ich immer damit, seine Anfangsposition, Geschwindigkeit und Orientierung zu definieren. Von dort aus stützt sich das System ausschließlich auf Trägheitsmessungen, um jeden nachfolgenden Bewegungszustand in Echtzeit abzuschätzen.
1. Beschleunigungsmessung
Das System verwendet tri-axiale Beschleunigungsmesser, um die lineare Beschleunigung in drei Richtungen zu messen. Diese Werte werden über die Zeit integriert, um die Geschwindigkeit zu berechnen, und dann erneut integriert, um Änderungen der Position zu berechnen.
2. Messung der Winkelrate
Gyroskope messen die Winkelgeschwindigkeit entlang der X-, Y- und Z -Achsen. Diese Messwerte werden verwendet, um die Ausrichtung des Systems durch Quaternion oder Euler -Winkelintegration zu aktualisieren.
3. Dead Reckoning Prinzip
INS arbeitet durch tote Abrechnung, was bedeutet, dass der aktuelle Zustand basierend auf der vorherigen und Sensoreingabe schätzt. Dies ermöglicht es ihm, ohne externe Referenzen wie GNSS zu navigieren.
4. Fehlerakkumulation und Drift
Da es laute Sensordaten integriert, akkumulieren kleine Verzerrungen und Fehler (z. B. Vorspannungsinstabilität, Skalierungsfaktorfehler) im Laufe der Zeit, was zu einer Drift sowohl in Position als auch in der Orientierung führt.
5. Sensorfusion und Unterstützung bei Eingaben
Um Drift zu minimieren, wird INS häufig mit externen Sensoren wie GNSS, Doppler -Geschwindigkeitsprotokollen (DVL), Barometern oder Magnetometern kombiniert. Diese Unterstützung von Quellen korrigieren akkumulierte Fehler und erweitern die betriebliche Genauigkeit.
Diese Architektur ermöglicht es dem INS, eine autonome Navigation in Echtzeit in Umgebungen zu liefern, in denen externe Signale begrenzt, gestört oder völlig nicht verfügbar sind-wie bei hoher Dynamik oder elektromagnetischer Störung.
Welche Leistungsmetriken definieren die Qualität eines Ins?
Bei der Auswahl eines Trägheitsnavigationssystems ist das Verständnis seiner Kernleistungsparameter von wesentlicher Bedeutung, um sicherzustellen, dass es den Missionsanforderungen entspricht. Die folgenden Metriken sind am kritischsten:
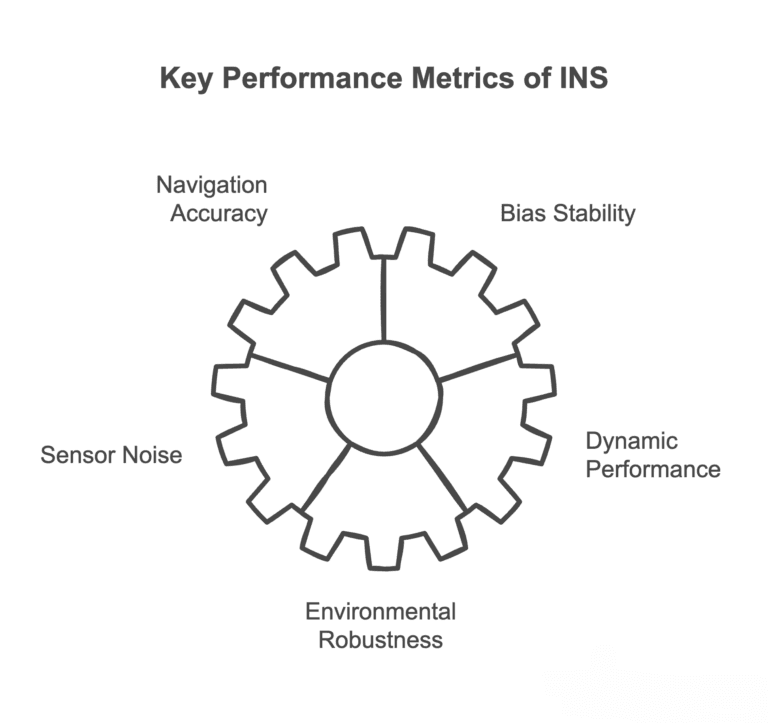
1. Navigationsgenauigkeit
Die Genauigkeit der INS umfasst Position, Geschwindigkeit und Einstellungsfehler, die sich im Laufe der Zeit ansammeln. Eine hohe Präzision ist für Operationen in GNSS-verurteilten Umgebungen von entscheidender Bedeutung. Das Guodenav GFS120A bietet beispielsweise eine Überschriftgenauigkeit von 0,01 ° (1σ) , eine Roll-/Tonhöhengenauigkeit von 0,005 ° (1σ) und die Positionierung der RTK-Ebene von <2 cm + 1 ppm mit einem einem Geschwindigkeitsfehler von nur 0,02 m/s .
2. Stabilität der Vorspannung
Die Bias-Stabilität spiegelt die langfristige Drift von Gyroskopen und Beschleunigern wider, die die Navigationsdauer direkt beeinflusst. Die Luidenav GFS120A verfügt über eine Gyro-Vorspannungsstabilität von 0,003 °/h und die Beschleunigungsmesser-Bias-Stabilität unter 20 μg , wodurch es für autonome Anwendungen mit hoher Präzision und langdauender Anwendungen geeignet ist.
3. Sensorgeräusch (Zufalls Walk)
Zufallswanderung quantifiziert das Kurzzeitsensorgeräusch. Niedrigere ARW- und VRW -Werte zeigen während der Bewegung sauberere, stabilere Daten an.
4. Dynamische Leistung
Aktualisierungsrate, Latenz und Bandbreite bestimmen, wie schnell die INS auf die Bewegung reagieren. Eine hohe dynamische Leistung ist für UAVs, Robotik und Raketen von entscheidender Bedeutung.
5. Robustheit der Umwelt
Ins müssen Vibrationen, Schock und Temperaturextremen standhalten. Die Einhaltung der MIL-STD- oder DO-160-Standards gewährleistet die Zuverlässigkeit unter harten Bedingungen.
Durch das Verständnis und Vergleich dieser Metriken können Integratoren die geeigneten Ins für ihre Plattform ausgewählt, die Kosten, Präzision und Umweltanforderungen ausbalancieren.
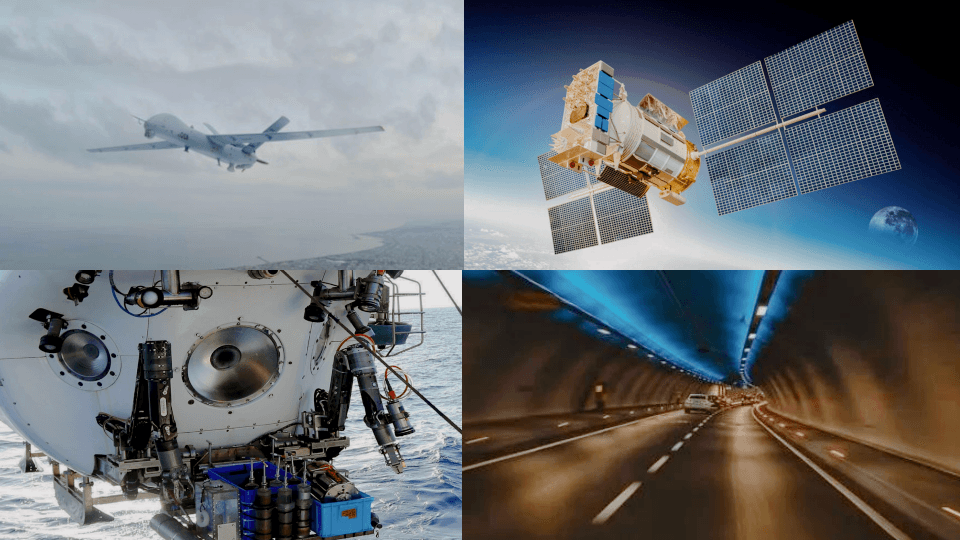
Was sind die typischen Anwendungen von INS in der gesamten Branche?
Inertiale Navigationssysteme (INS) werden in den Bereichen Luft- und Raumfahrt, Meeres, Verteidigung, unbemannte Systeme, industrielle Automatisierung und unterirdische Industrien häufig eingesetzt, in denen eine kontinuierliche, signalunabhängige Navigation von entscheidender Bedeutung ist. In der Luft- und Raumfahrt ermöglichen sie präzise Flugzeuge und Raketenanleitung; In Meeresanwendungen unterstützen sie U -Boote und AUVs, bei denen GNSS nicht verfügbar ist. Verteidigungssysteme stützen sich auf INS für Targeting, Feuerkontrolle und Navigation in GPS-verurteilten Umgebungen. Unbemannte Plattformen wie UAVs, UGVs und UUVs verwenden Ins für Echtzeit-Positionierung und Sensorfusion. In der industriellen Robotik sorgt INS für eine genaue Bewegungskontrolle für AGVs und Krane. Beim Bergbau und Tunneln ermöglicht INS eine zuverlässige Untergrundpositionierung für schwere Maschinen und Bohrsysteme.
Wie führt Guidenav in der Trägheitsnavigationsindustrie?
Mit mehr als 15 Jahren Expertise Guidenav leistungsstarke Trägheitsnavigationslösungen, die weltweit von Verteidigung, Luft- und Raumfahrt und autonomen Systemintegratoren vertrauen.
Verschiedene Produktlinien
Von kompakten MEMs INS für UAVs bis hin zu hochpräzisen Nebel-Ins für Marine und Luft- und Raumfahrt deckt Guidenav eine breite Palette von Missionsprofilen ab.
Optimiert für Swap-C
Alle Systeme sind für Größe, Gewicht, Leistung und Kosteneffizienz gebaut - ideal für mobile, eingebettete und taktische Plattformen.
Hybridintegration bereit
Unsere INS -Plattformen unterstützen eine nahtlose Fusion mit GNSS, DVL und anderen Unterstützungsensoren über Standardschnittstellen (UART, CAN, Ethernet).
Robust und fachdreher
Guidenav-Einheiten wurden für die MIL-STD-810H konzipiert und sind schockfeste, vibrationstolerant und arbeiten in rauen Umgebungen zuverlässig.
Guidenav ist der bevorzugte Partner für Integratoren, die fortschrittliche Trägheitsnavigationssysteme (INS) suchen, die hohe Präzision, Betriebsrobustheit und vollständige Exportkonformität für anspruchsvolle Verteidigung, Luft- und Raumfahrt und autonome Anwendungen kombinieren.