Haben Sie jemals versucht, ein Navigationssystem zu integrieren, nur um zu erkennen, dass es überhaupt keine Position gibt?
Das passiert, wenn Menschen eine IMU mit einem Ins verwirren. Es klingt technisch, aber die Konsequenzen sind real: falsche Hardware -Auswahl, verschwendetes Budget und Systeme, die einfach nicht wie erwartet funktionieren. Das Fix? Verstehen Sie die wichtigsten Unterschiede zwischen IMU, INS und dem, was jeder tatsächlich tun soll. Dieser Leitfaden wird Sie durch ihn führen - alle in einfachem Englisch.
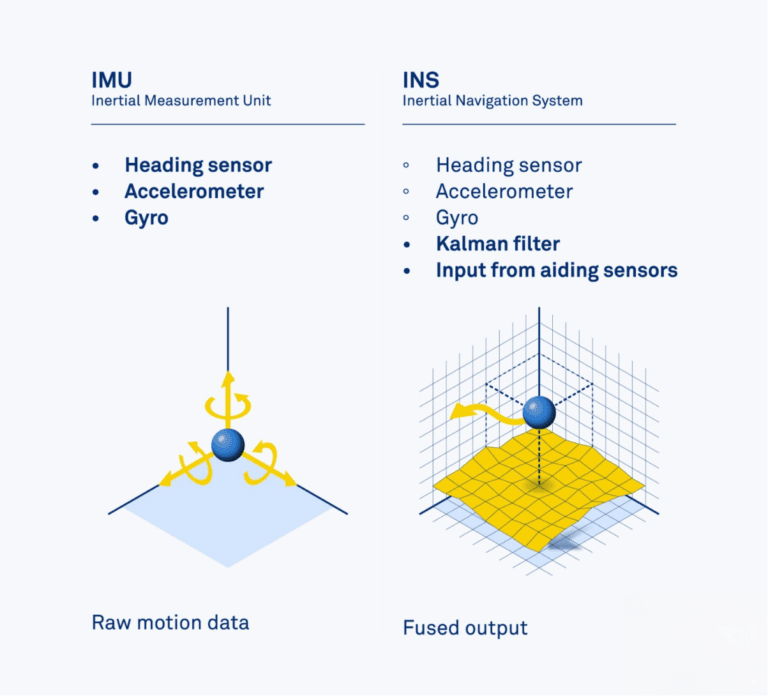
Eine IMU misst die Bewegung, während ein Ins IMU -Daten verwendet, um Position und Ausrichtung im Laufe der Zeit zu berechnen - IMU ist ein Sensor, INS ist ein System.
Lassen Sie uns die Verwirrung aufklären - stand bei Schritt.
Inhaltsverzeichnis

Was ist eine IMU?
Eine Trägheitsmesseinheit (IMU) ist eine Sensorvorrichtung, die Beschleunigung und Winkelgeschwindigkeit . In der Regel mit MEMS-, Nebel- oder HRG -Technologien erstellt, enthält eine IMU Beschleunigungsmesser, Gyroskope und manchmal Magnetometer . Es gibt rohe Trägheitsdaten aus, die zur Abschätzung der Bewegung im Raum verwendet werden. IMUS werden in UAVs, Robotik, Fahrzeugen und Smartphones häufig verwendet. Sie bieten jedoch keine Position oder Orientierung , es sei denn, sie integriert in die zusätzliche Verarbeitung. IMUS variieren in der Präzision, von kostengünstigen Handelsqualität bis hin zu taktischen und navigationsqualifizierten Sensoren wie dem GMS400 von Guidenav.

Was ist ein Ins?
Ein Trägheitsnavigationssystem (INS) ist ein vollständiges System, das IMU-Daten verwendet, um Position, Geschwindigkeit und Haltung in Echtzeit zu berechnen. Es umfasst normalerweise:
- Eine eingebettete IMU
- Ein leistungsstarker Prozessor an Bord
- Sensorfusionalgorithmen (z. B. Kalman -Filter )
- Oft ein GNSS -Modul zur Unterstützung
Die INS führt eine Echtzeitintegration von IMU-Ausgängen durch, um eine kontinuierliche Navigationslösung bereitzustellen. Aus diesem Grund kann es auch in einer begrenzten Zeit in GNSS-verurteilten Umgebungen funktionieren, was es in Luft- und Raumfahrt-, maritimen und autonomen Missionen . Systeme wie GFS120 und Guide2D von Guidenav veranschaulichen eine solche Integration.
Wie unterscheiden sich IMUS und INSS?
Die meisten Menschen vereinfachen es, indem sie sagen: „Ein INS ist nur eine IMU mit einem GNSS -Modul.“ Technisch gesehen ist das ein Anfang - aber es ist weit vom ganzen Bild entfernt.
Ja, ein Ins enthält eine IMU im Kern. Es integriert aber auch einen Prozessor, GNSS (oft mit RTK- oder SBAs -Unterstützung) und manchmal externe Unterstützungsensoren wie Radcodierern, Fluggeschwindigkeitssensoren, barometrische Höhenmesser oder Doppler -Geschwindigkeitsprotokolle (DVL) . Diese Ergänzungen ermöglichen es dem INS, Daten in Echtzeit zu verschmelzen und nicht nur Bewegungen zu liefern-aber hochverträgliche Schätzungen von Position, Geschwindigkeit und Orientierung.
Stellen Sie sich eine IMU als ein Thermometer vor - es sagt Ihnen die Rohdaten. Der INS ist der Wetterbericht: gefiltert, verschmolzen und bereit, darauf zu reagieren.
| Besonderheit | IMU | INS |
|---|---|---|
| Kernfunktion | Maßnahmen zur Beschleunigung und Rotation | Berechnet die volle Position, Geschwindigkeit, Orientierung |
| Komponenten | Beschleunigungsmesser, Gyroskop | IMU + GNSS + Prozessor + optionale Sensoren |
| Beschleunigungsmesser | Rohbewegungsdaten | Fusionsnavigationsdaten (Echtzeit) |
| GNSS -Unterstützung | Keiner | Integriert (RTK/SBAS optional) |
| Externe Unterstützung | Nicht anwendbar | Kilometerzähler, DVL, Fluggeschwindigkeit, Höhenmesser usw. |
Können Sie mit nur einer IMU navigieren?
Stellen Sie sich eine IMU vor, wie Bewegung mit geschlossenen Augen zu spüren. Sie können erkennen, dass Sie vorwärts gehen oder sich drehen - aber Sie haben keine Ahnung, wo Sie sich befinden. Das passiert, wenn Sie versuchen, nur mit einer IMU zu navigieren.
Sicher, Sie können die Beschleunigung über die Zeit integrieren, um die Position abzuschätzen. Aber winzige Fehler machen sich schnell auf und verwandeln sich innerhalb von Sekunden in große Fehler. Dies wird als Drift bezeichnet und macht eigenständige IMUS unzuverlässig für die Navigation.
Sie sind großartig für die kurzfristige Stabilisierung-wie ein Gimbal-Niveau-, aber nicht herauszufinden, wo Sie sich befinden oder wohin Sie gehen. Dafür brauchen Sie eine Ins.
Wie verarbeitet ein INS IMU -Daten?
Im Gegensatz zu einer IMU, die nur Bewegung erfasst, interpretiert eine Ins, die sie bewegt und in vollständige Navigationserkenntnisse umwandelt. Dazu gehört, dass Sie wissen, wo Sie sich befinden, wie schnell Sie sich bewegen und in welche Richtung Sie ausgesetzt sind. Aber es passiert nicht automatisch. Es erfordert eine Kette sorgfältig gestalteter Schritte-die Physik, Mathematik und Echtzeitkorrektur-Rohsignale in zuverlässige Navigation umwandeln.
Gehen wir durch den Prozess:
1. Sense Motion (IMU -Eingabe)
Alles beginnt mit der IMU, die die Beschleunigung (über Beschleunigungsmesser) und die Winkelrate (über Gyroskope) kontinuierlich misst. Diese Werte spiegeln wider, wie sich das System im 3D -Raum bewegt.
➡ Dieser Schritt verleiht den INS ihre rohen Bewegungsbewusstsein.
2. Berechnen Sie Geschwindigkeit und Position
Die INS integriert die Beschleunigung, um Geschwindigkeit zu erhalten, und integriert dann die Geschwindigkeit, um die Position im Laufe der Zeit abzuschätzen. Dies sagt dem System, wie weit es von seinem Ausgangspunkt gereist ist.
➡ So verfolgt die INS die Bewegung - selbst ohne GPS.
3.. Schätzen Sie die Orientierung
Durch die Verarbeitung von Gyroskopdaten und Verweisen von Vektoren wie Schwerkraft und Magnetfeld der Erde bestimmt die INS Roll, Tonhöhe und Gier - Ihre vollständige 3D -Orientierung.
➡ Dieser Schritt hilft dem System zu verstehen, wie es gedreht oder geneigt ist.
4. Anwenden Sie die Sensorfusion für Genauigkeit an
IMU -Daten allein driftet im Laufe der Zeit. Die INS verwendet intelligente Algorithmen - wie Kalman -Filter -, um den IMU -Eingang mit anderen Sensoren zu kombinieren:
- GNSS / RTK / SBAs
- Rad Odometer
- DVL- oder Fluggeschwindigkeitssensoren
- Barometrische Höhenmesser
Diese Korrekturen verbessern die Genauigkeit und langfristige Stabilität dramatisch.
➡ Fusion hält das System zuverlässig, auch wenn einige Sensoren das Signal verlieren.
5. Echtzeit-Navigationsausgabe liefern
Die endgültige Ausgabe ist ein kontinuierlicher Echtzeitstrom aus Position, Geschwindigkeit und Einstellungsdaten-viele Male pro Sekunde und bereit für die Verwendung von Flugcontrollern, Autopiloten oder Mapping-Systemen.
➡ Das macht die INS zu einer vollständigen Navigationslösung.
Die INS-Produkte von Guidenav folgen dieser Architektur-mit Fusionsmotoren, die auf GNSS-verurteilte Bedingungen, dynamische Umgebungen und Plattformen mit hoher Vibration abgestimmt sind. Das Ergebnis: Zuverlässige Navigation können Sie vertrauen, wenn es am wichtigsten ist.
Wann ist eine IMU genug für Ihre Bewerbung?
Eine IMU ist alles, was Sie brauchen, wenn Ihr System nur Bewegung erfassen , die Position nicht berechnen oder mit der Zeit übergehen. Es ist ideal, wenn Sie auf Bewegung reagieren und nicht versuchen, den absoluten Standort zu verfolgen.
Gemeinsame Anwendungsfälle umfassen:
Kamera -Stabilisierung
Erkennt Vibration oder Neigung, um Motoren zu helfen, die Kamera ruhig zu halten.
Gestenverfolgung
In AR/VR oder Wearables, wo Sie der Bewegung folgen - nicht genaue Position.
Kurzfristige Orientierung
Wird in Drohnen oder Robotern während des Starts, Schwebes oder schnellen Manöver verwendet.
Flugkontrollunterstützung
In Kombination mit GNSS oder optischer Fluss bietet IMUs ein schnelles Feedback für die Stabilisierung der Drohnen.
Denken Sie nur daran: Imus geben nur rohe Beschleunigung und Rotation. Wenn Sie Orientierung oder Geschwindigkeit benötigen, müssen Sie die Mathematik selbst aufbauen - Filter, Driftkorrektur und mehr.
Wenn dies in der Fähigkeit Ihres Systems liegt, ist eine IMU eine leichte, erschwingliche und effiziente Lösung.
Wann brauchst du wirklich eine volle Ins?
Sie benötigen eine vollständige Ins, wenn Ihr System jederzeit genaue Position und Ausrichtung - insbesondere in Umgebungen, in denen GNSS möglicherweise ausfällt oder nicht verfügbar ist.
Typische Anwendungsfälle umfassen:
- GNSS-verurteilte Umgebungen: Wie Tunnel, Innen-, Unterwasser- oder Urban Canyons
- Hochdynamische Plattformen: Drohnen, Raketen und Offroad-Fahrzeuge, die schnelle, genaue Updates benötigen
- Dead Reckoning: Wenn das System die Navigation zwischen GNSS -Signalen aufrechterhalten muss - oder überhaupt ohne GNSS
- Präzisionskritische Aufgaben: Abbildung, Targeting oder autonomes Fahren
In diesen Situationen würde eine IMU allein schnell driften und zu unzuverlässigen Ergebnissen führen. Ein INS löst dies, indem Trägheit mit GNSS und optionalen Sensoren wie DVL, Odometern oder Höhenmesser verschmilzt.
Was sind die häufigen Fehler bei der Auswahl von IMU oder Ins?
Seien wir ehrlich - wenn es um Trägheitssensoren geht, ist es einfach, den falschen Anruf zu tätigen, insbesondere wenn Sie neu auf dem Feld sind. Ich habe gesehen, wie Teams das falsche Tool öfter ausgewählt haben, als ich zählen kann. Und es geht selten um die Technologie - es geht um das Missverständnis des Problems.

Hier gehen die Dinge normalerweise aus der Spur:
Fehler Nr. 1: Wenn Sie denken, dass eine IMU Ihnen Position gibt
Es tut es nicht. Eine IMU sagt Ihnen nur, wie schnell Sie sich bewegen oder drehen. Wenn Sie auf Echtzeit-Koordinaten aus der Box hoffen, werden Sie enttäuscht sein.
Fehler Nr. 2: Verwenden Sie eine Einstiegs-IMU für einen anspruchsvollen Job
Ein kostengünstiger Sensor sieht auf dem Papier gut aus, aber wenn Sie ihn an einer sich schnell bewegenden Drohne oder einem Roboter anschnallen, ruinieren das Geräusch und die Drift Ihre Daten.
Fehler Nr. 3: Für einen Ins bezahlen, wenn eine IMU den Trick gemacht hätte
Wenn Sie nur eine Kamera stabilisieren oder eine grundlegende Ausrichtung erkennen müssen, ist ein volles Ins übertrieben. Lösen Sie kein 300 -Dollar -Problem mit einer 3000 -Dollar -Lösung.
Fehler Nr. 4: Vergessen Sie die reale Umgebung
Laborspezifikationen spiegeln nicht immer die Feldleistung wider. Hohe Schwingung, extreme Temperaturen oder Stoßlasten können schnell billige Sensoren abwerfen.
Fehler Nr. 5: Unterschätzung der Integrationsaufwand
RAW IMU-Daten sind keine Plug-and-Play. Wenn Sie nicht über die richtige Software, Filter oder Algorithmen verfügen, wird selbst der beste Sensor unterdopperieren.
Welche Unterstützung bietet Guidenav für die Auswahl der IMU/INS an?
Bei Guidenav versenden wir nicht nur Sensoren - wir helfen Ihnen beim Aufbau des richtigen Systems . Wir bieten an:
- Eins-zu-Eins-Anwendungsberatung
- IMU/INS -Leistungsübereinstimmung
- Integrationsführer für UAVs, UGVs und maritime Systeme
- Datenblattzugriffs- und Bewertungskits
- Support für schnelle Reaktion Engineering
Unabhängig davon, ob Sie ein UAV mit geringer Leistung oder ein Navigationssystem mit GNSS-verlegtem Navigation erstellen, können wir Ihnen bei der Auswahl zwischen MEMS IMU, Nebel-IMU oder vollständiger Ins auf Ihrem Missionsprofil helfen.