
Inertialmesseinheit (IMU) – Weltweit vertraut
Trägheitsmesseinheit
Mehr als 15.000 IMU-Systeme sind in über 35 Ländern im Einsatz
Maßgeschneiderte Lösungen, denen globale Schlüsselakteure vertrauen
Die Inertialmesseinheiten (IMU) von GuideNav sind für herausragende Leistung in den Bereichen Luft- und Raumfahrt, Verteidigung und Industrie konzipiert. Ob Sie eine kompakte und kostengünstige MEMS-IMU oder eine hochpräzise FOG-IMU benötigen – wir bieten Ihnen Spitzentechnologie, die selbst in anspruchsvollsten Umgebungen zuverlässig ihren Dienst verrichtet.
Guidenavs vorgestelltes MEMS-basiertes IMU-Modell
AUSGEWÄHLTE MEMS-IMU-MODELLE
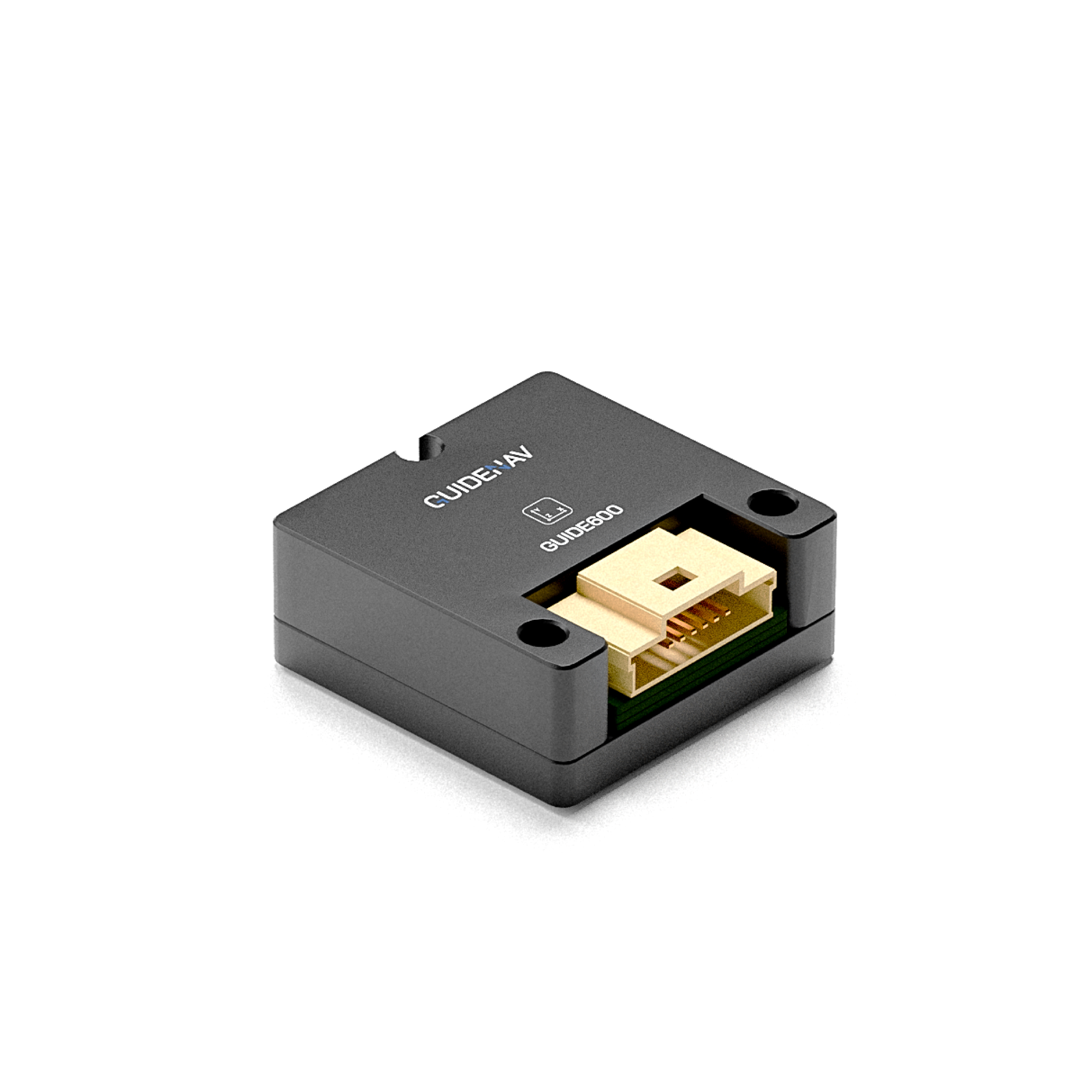
- Kostengünstig
- Kreiselbereich: ± 500 °/s
- Bias-Instabilität: ≤ 2 °/h
- Biasstabilität: ≤ 10°/h
- Gewicht: ≤ 10 g
- Protokoll: UART

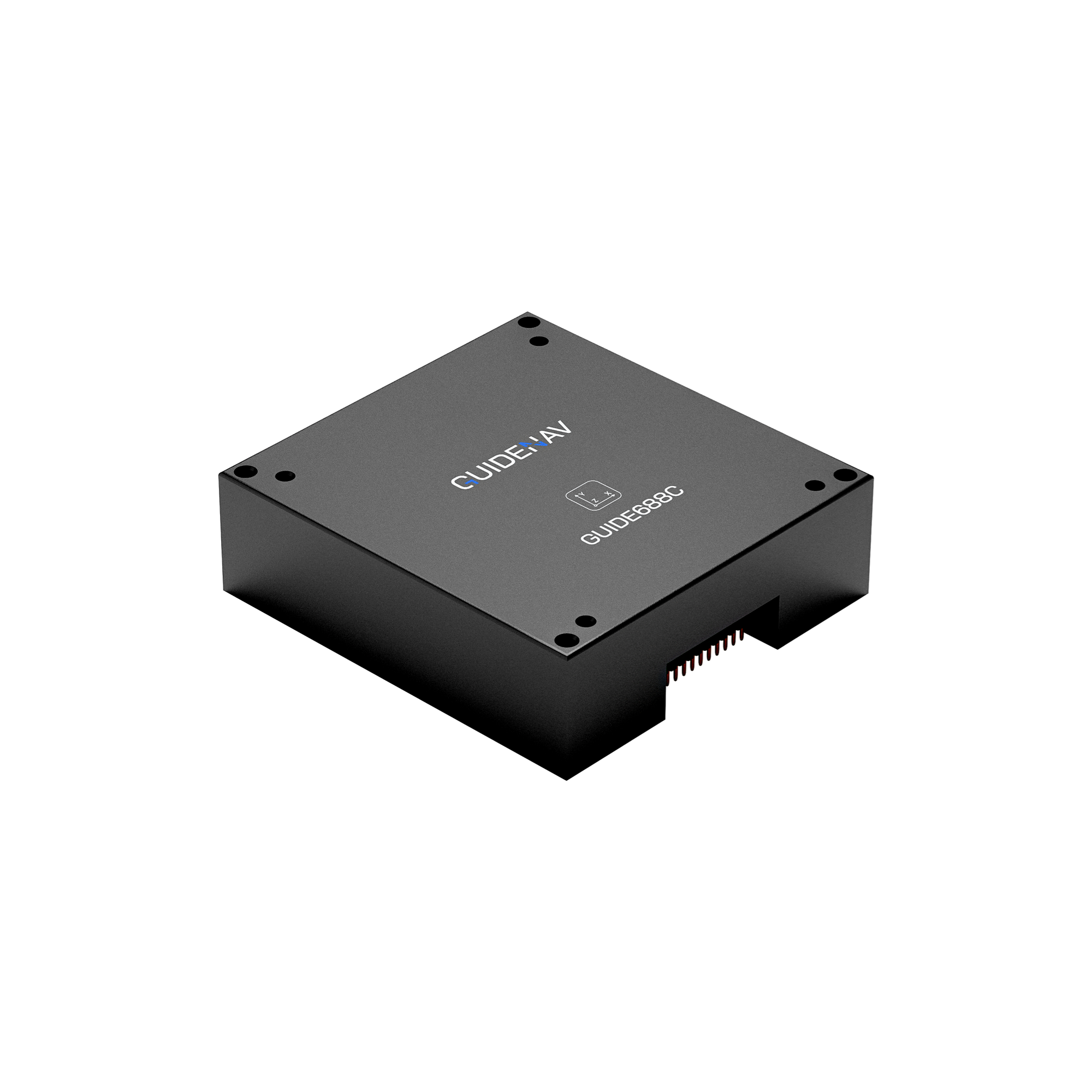
- 10-Achsen-MEMS-IMU
- Kreiselbereich: ± 450 °/s
- Bias-Instabilität: ≤ 2°/h
- Biasstabilität: ≤ 4°/h
- Gewicht: ≤ 40 g
- Protokoll: SPI
- 10-Achsen-MEMS-IMU
- Kreiselbereich: ± 450 °/s
- Bias-Instabilität: ≤ 0,8 °/h
- Biasstabilität: ≤ 3°/h
- Gewicht: ≤ 40 g
- Protokoll: SPI

- Mittlere bis hohe Genauigkeit
- Kreiselbereich: ± 320 °/s
- Bias-Instabilität: ≤ 0,4 °/h
- Biasstabilität: ≤ 2°/h
- Gewicht: ≤ 10 g
- Protokoll: RS422

- Breiter Kreiselbereich
- Kreiselbereich: ± 2000 °/s
- Bias-Instabilität: ≤ 3 °/h
- Biasstabilität: ≤ 10°/h
- Gewicht: ≤ 30 g
- Protokoll: UART

- GUN-HARD bis 20.000 g
- Kreiselbereich: Bis zu 6000 °/s
- Bias-Instabilität: ≤ 3°/h
- Biasstabilität: ≤ 10°/h
- Gewicht: ≤ 50 g
- Protokoll: UART

- Hohe Genauigkeit
- Kreiselbereich: ± 450 °/s
- Bias-Instabilität: ≤ 0,2 °/h
- Biasstabilität: ≤ 1°/h
- Gewicht: ≤ 40 g
- Protokoll: RS422

- Extrem hohe Genauigkeit
- Kreiselbereich: ± 400 °/s
- Bias-Instabilität: ≤ 0,1 °/h
- Biasstabilität: ≤ 0,5°/h
- Gewicht: ≤ 55 g
- Protokoll: RS422
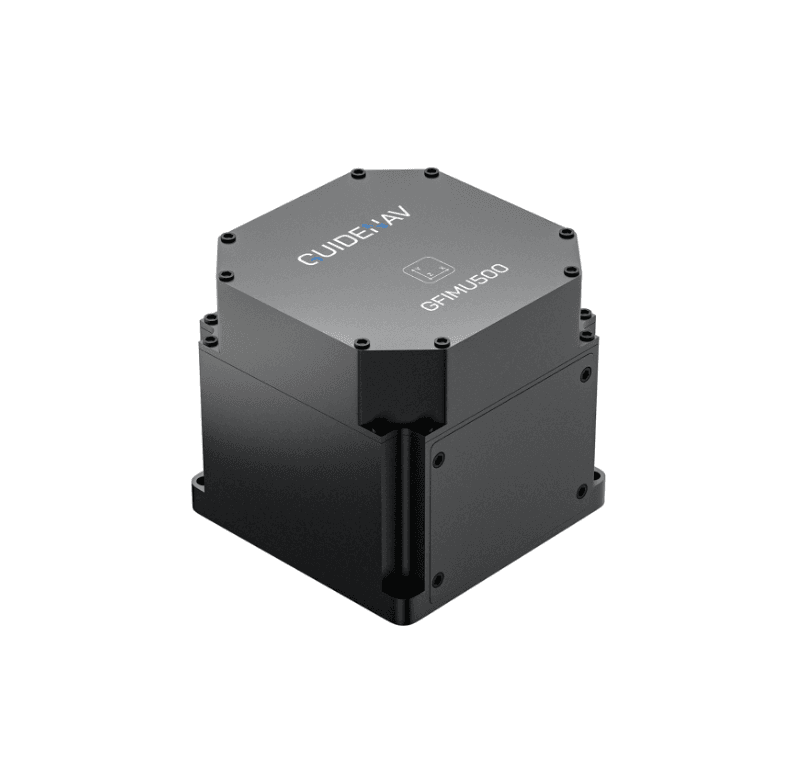
Guidenavs vorgestellte faseroptische Trägheitsmesseinheit
AUSGEWÄHLTE NEBEL-IMU-MODELLE

- Mittlere Präzision
- Biasstabilität (10 s) ≤ 0,1°/h
- Gyro-Winkel-Random-Walk: ≤0,02 Grad/√h
- ± 500 °/s Bereich
- Gewicht: <900 Gramm
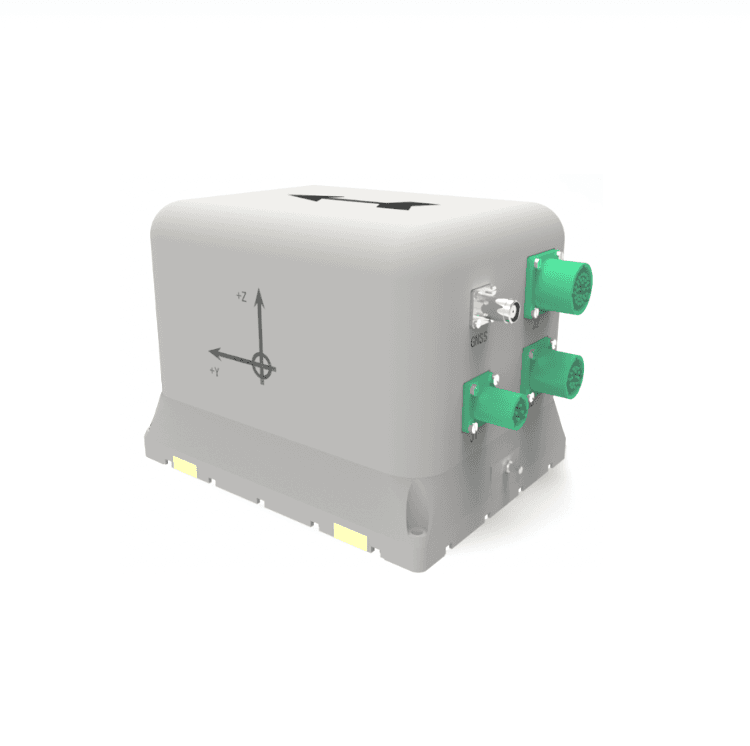
- Mittlere bis hohe Präzision
- Biasstabilität (10 s) ≤ 0,05°/h
- Gyro-Winkel-Random-Walk: ≤0,005 deg/√h
- ± 500 °/s Bereich
- Gewicht: <1200 Gramm

- Hohe Präzision
- Biasstabilität (10 s) ≤ 0,01°/h
- Gyro-Winkel-Random-Walk: ≤0,0005 deg/√h
- ± 300 °/s Bereich
- Gewicht: <5000 Gramm
- Ultrahohe Präzision
- Biasstabilität (10 s) ≤ 0,005°/h
- Gyro-Winkel-Random-Walk: ≤0,0003 deg/√h
- ± 500 °/s Bereich
- Gewicht: <5000 Gramm
Sichern Sie sich jetzt Ihre individuelle Lösung!
Ihr Projekt verdient eine Lösung, die exakt auf Ihre Anforderungen zugeschnitten ist. Um Ihnen die optimale Inertialmesseinheit (IMU) für Ihre Bedürfnisse zu liefern, bitten wir Sie, uns die spezifischen Parameter und Leistungsanforderungen Ihrer Anwendungen mitzuteilen. Ob Präzision, Stabilität oder Größenbeschränkungen – unser Team unterstützt Sie gerne bei der Suche nach der perfekten Lösung.
Inhaltsverzeichnis
Laden Sie diese Seite als PDF herunter
Um Ihnen Zeit zu sparen, haben wir auch eine PDF-Version vorbereitet, die den gesamten Inhalt dieser Seite enthält. Hinterlassen Sie einfach Ihre E-Mail-Adresse und Sie erhalten umgehend den Download-Link.
Einführung der Inertialmesseinheit (IMU)
Was ist eine Inertialmesseinheit?
Eine Inertialmesseinheit (IMU) misst die Beschleunigung, die Winkelgeschwindigkeit und gegebenenfalls das Magnetfeld eines Objekts und liefert so Daten zu dessen Bewegung und Ausrichtung. Sie besteht typischerweise aus Beschleunigungsmessern, Gyroskopen und manchmal Magnetometern. IMUs sind unerlässlich für Systeme, die eine präzise Navigation erfordern, beispielsweise in der Luft- und Raumfahrt, der Verteidigung und der Robotik. Dort tragen sie dazu bei, eine genaue Positionsbestimmung und Stabilität ohne externe Referenzsysteme wie GPS zu gewährleisten.
Anwendungen von Inertialmesseinheiten (IMU)
Anwendungen von Inertialmesseinheiten (IMU)
01
Luft- und Raumfahrt
IMUs sind für die Navigation und Steuerung von Flugzeugen unerlässlich. Sie tragen zur Aufrechterhaltung der Orientierung bei und liefern Echtzeitdaten für Autopilotsysteme, wodurch Flugzeuge auf Kurs bleiben und die Flugsicherheit verbessert wird.
02
Verteidigung und Militär
IMUs werden in Raketen, Drohnen und Militärfahrzeugen häufig eingesetzt, um präzise Bewegungserfassung, Navigation und Zielführung zu gewährleisten. Sie ermöglichen autonomen Systemen den genauen Betrieb auch in Umgebungen ohne GPS-Empfang.
03
Autonome Fahrzeuge und Drohnen
In selbstfahrenden Autos und Drohnen liefern IMUs kontinuierliches Feedback zu Orientierung, Geschwindigkeit und Bewegung und tragen so zur Stabilisierung des Fluges und zur Gewährleistung einer präzisen Navigation in komplexen Umgebungen bei.
04
Robotik
IMUs sind in der Robotik für die präzise Bewegungssteuerung unerlässlich. Sie werden in Robotern eingesetzt, um Position und Orientierung zu erfassen und so eine effiziente und autonome Bewegung in Industrie-, Medizin- und Servicerobotern zu ermöglichen.
05
Geophysikalische Vermessung
In der geophysikalischen Exploration werden IMUs in Geräten zur Erkennung und Messung seismischer Bewegungen eingesetzt und liefern wertvolle Daten für die wissenschaftliche Forschung und die Rohstoffexploration.


Warum eine Inertialmesseinheit?
Warum sollte man sich für eine IMU anstelle eines reinen Gyroskops entscheiden?
Während sowohl Inertialmesseinheiten (IMUs) als auch Gyroskope die Winkelgeschwindigkeit messen, bietet eine IMU eine umfassendere Lösung, indem sie mehrere Sensoren kombiniert und so ein breiteres Spektrum an Bewegungs- und Orientierungsdaten liefert. Hier sind die Hauptgründe dafür
Umfassende Bewegungserfassung:
Während ein Gyroskop nur die Winkelgeschwindigkeit misst, kombiniert eine IMU Beschleunigungsmesser und manchmal Magnetometer, um sowohl die lineare Beschleunigung als auch die Winkelrotation zu erfassen und so ein vollständiges 3D-Bewegungsprofil zu liefern.Präzisere Positionierung:
Gyroskope können mit der Zeit driften. Eine IMU korrigiert dies mithilfe von Beschleunigungsmesserdaten und sorgt so für eine stabilere und genauere Orientierung und Positionierung über längere Zeiträume.Bessere Leistung in Umgebungen ohne GPS:
IMUs eignen sich ideal für Anwendungen, bei denen GPS nicht verfügbar ist, wie z. B. in Innenräumen, unter Wasser oder im Weltraum, da sie sowohl Beschleunigung als auch Rotation messen und somit vollständige Navigationsdaten liefern.Vereinfachtes Systemdesign:
Eine IMU integriert mehrere Sensoren in einer kompakten Einheit, wodurch die Systemkomplexität und der Bedarf an separaten Beschleunigungsmessern und Gyroskopen reduziert werden.




Wichtige Parameter der Inertialmesseinheit (IMU)
Hauptspezifikationen einer Inertialmesseinheit (IMU)
Die Bias-Instabilität (Gyroskop)
misst die Stabilität des Gyroskops über die Zeit ohne externe Einflüsse und wird typischerweise in °/h angegeben. Niedrigere Werte deuten auf eine höhere Stabilität hin, was für Präzisionsanwendungen wie Navigation und Führung von entscheidender Bedeutung ist.Der Winkel-Random-Walk
gibt den Rauschpegel bei Winkelgeschwindigkeitsmessungen in °/√h an. Ein niedrigerer Random-Walk gewährleistet eine bessere Leistung im Langzeitbetrieb.Der Messbereich
gibt die maximale Beschleunigung (g) oder Winkelgeschwindigkeit (°/s) an, die die IMU messen kann. Ein größerer Bereich ermöglicht die Erfassung dynamischerer Umgebungen.Die Bandbreite
definiert, wie schnell die IMU auf Änderungen reagieren kann und wird typischerweise in Hertz gemessen. Eine höhere Bandbreite unterstützt Anwendungen, die schnelle Datenaktualisierungen erfordern, wie beispielsweise Drohnen oder Roboter.Die Umweltverträglichkeit
umfasst den Betriebstemperaturbereich sowie die Beständigkeit gegen Vibrationen und Stöße. Dies gewährleistet die zuverlässige Funktion der IMU auch unter rauen Bedingungen, wie sie beispielsweise in der Luft- und Raumfahrt oder im militärischen Bereich vorkommen.
MEMS-IMU vs. Glasfaser-IMU: Welche ist besser?
Die Wahl zwischen MEMS- und faseroptischen Gyroskop- IMUs (FOG-IMUs) hängt von den spezifischen Anforderungen Ihres Projekts ab. Standard-MEMS-IMUs sind kompakt, kostengünstig und ideal für Anwendungen mit mittleren Genauigkeitsanforderungen. Dank technologischer Fortschritte erreichen hochpräzise MEMS-IMUs eine Bias-Instabilität von nur 0,1°/h und eignen sich daher auch für einige militärische und luft- und raumfahrttechnische Anwendungen, die bisher hauptsächlich von FOG-IMUs dominiert wurden.
FOG-IMUs bleiben jedoch die bevorzugte Wahl für Anwendungen, die höchste Genauigkeit , Langzeitstabilität und Zuverlässigkeit in extremen Umgebungen erfordern. Nachfolgend finden Sie einen detaillierten Vergleich, der Ihnen bei Ihrer Entscheidung helfen soll:
| Besonderheit | MEMS IMU | Nebel-IMU |
|---|---|---|
| Genauigkeit | Standardmäßige MEMS-IMUs bieten eine moderate Genauigkeit. Hochpräzise MEMS-IMUs können eine Bias-Instabilität von nur 0,1°/h , vergleichbar mit Einsteiger-FOG-IMUs. | Bietet höchste Genauigkeit mit einer Bias-Instabilität von nur 0,001°/h und ist damit ideal für lang andauernde, missionskritische Einsätze geeignet. |
| Größe und Gewicht | Kompakt und leicht, wodurch sie sich für Systeme mit strengen Größen- und Gewichtsbeschränkungen eignen, wie z. B. UAVs oder Roboter. | Größer und schwerer, konzipiert für Systeme, bei denen die Leistung wichtiger ist als die Größe. |
| Umweltverträglichkeit | Verbesserte Robustheit gegenüber Stößen, Vibrationen und Temperaturschwankungen, insbesondere bei fortschrittlichen MEMS-Designs. Zuverlässig für die meisten industriellen und militärischen Anwendungen. | Außergewöhnliche Zuverlässigkeit auch unter extremen Bedingungen, einschließlich starker Stöße, Vibrationen und lang anhaltender Betriebsbelastung. |
| Kosten | Kostengünstiger, insbesondere für Anwendungen, bei denen Standardgenauigkeit ausreicht. Hochpräzise MEMS-IMUs sind bei vergleichbarer Genauigkeit günstiger als FOG-IMUs. | Höhere Kosten aufgrund der komplexen optischen Technologie, aber gerechtfertigt für Systeme, die eine beispiellose Stabilität und Präzision erfordern. |
| Anwendungen | Geeignet für allgemeine Navigationszwecke in UAVs, Robotern, industriellen Systemen und einigen militärischen Anwendungen bei Verwendung hochpräziser MEMS. | Bevorzugt für die Bereiche Luft- und Raumfahrt, Raketen, U-Boote und kritische Verteidigungssysteme, die Langzeitstabilität und höchste Präzision erfordern. |
Einführung der Inertialmesseinheit (IMU)
Sechs-Achsen- vs.
Neun-Achsen-Trägheitsmesseinheit
Bei der Beschäftigung mit Inertialmesseinheiten (IMUs) stößt man häufig auf Begriffe wie „Sechs-Achsen-IMU“ und „Neun-Achsen-IMU“. Diese Bezeichnungen beziehen sich auf die Anzahl und Art der im Gerät integrierten Sensoren. Das Verständnis des Unterschieds zwischen Sechs-Achsen- und Neun-Achsen-IMUs hilft Ihnen bei der Auswahl des richtigen Sensors für Ihre spezifische Anwendung.
| Besonderheit | Sechs-Achsen-IMU | Neun-Achsen-IMU |
|---|---|---|
| Komponenten | 3-Achsen-Beschleunigungsmesser, 3-Achsen-Gyroskop | 3-Achsen-Beschleunigungsmesser, 3-Achsen-Gyroskop, 3-Achsen-Magnetometer |
| Funktionalität | Misst die lineare Beschleunigung und die Winkelgeschwindigkeit | Misst lineare Beschleunigung, Winkelgeschwindigkeit und absolute Richtung |
| Genauigkeit | Gut geeignet für kurzfristige Stabilität | Verbesserte Genauigkeit bei reduzierter Drift im Laufe der Zeit |
| Anwendungen | Drohnen, Robotik, Unterhaltungselektronik | Navigationssysteme, Augmented Reality, Autonome Fahrzeuge |
| Kosten | Im Allgemeinen günstiger | Typischerweise höher aufgrund zusätzlicher Sensoren |
Kalibrierung der Trägheitsmesseinheit
Was ist die Kalibrierung einer Inertialmesseinheit?
Die korrekte Kalibrierung einer Inertialmesseinheit (IMU) ist entscheidend, um die für die jeweilige Anwendung erforderliche Genauigkeit zu gewährleisten. Ohne Kalibrierung können die Daten der IMU inkonsistent sein und zu fehlerhaftem Systemverhalten führen. Dies kann die Navigationsgenauigkeit von Drohnen, die Bahnverfolgung in der Luft- und Raumfahrt oder die Stabilität von Robotern beeinträchtigen.
IMUs bestehen typischerweise aus Beschleunigungsmessern, Gyroskopen und mitunter Magnetometern. Jeder dieser Sensoren kann verschiedenen Fehlerquellen unterliegen, wie beispielsweise Temperaturschwankungen, mechanischer Belastung oder Fertigungstoleranzen. Kalibrierungsverfahren helfen, diese Probleme zu minimieren und so eine präzise und zuverlässige Datenausgabe zu gewährleisten.
Inertialmesseinheit vs. AHRS vs. INS
IMU vs. AHRS vs. INS: Was ist der Unterschied?
- IMU (Inertial Measurement Unit) : Misst Beschleunigung und Winkelgeschwindigkeit. Sie liefert Rohdaten zur Bewegung, berechnet aber weder Orientierung noch Position.
- AHRS (Attitude and Heading Reference System) : Erweitert die IMU durch die Bereitstellung von Echtzeit-Orientierungs- (Nick-, Roll-, Gierwinkel) und Kursinformationen, oft durch die Einbeziehung von Magnetometern und GPS.
- INS (Inertial Navigation System) : Kombiniert die Funktionen der IMU und fortschrittlicher Algorithmen, um Positions-, Geschwindigkeits- und Orientierungsdaten zu liefern, ohne auf externe Referenzen wie GPS angewiesen zu sein.
| Besonderheit | IMU | AHRS | INS |
|---|---|---|---|
| Zweck | Misst Beschleunigung und Winkelgeschwindigkeit | Liefert Echtzeit-Orientierungsinformationen (Neigung, Rollen, Gieren) und Kursinformationen | Liefert vollständige Navigationsdaten: Position, Geschwindigkeit und Orientierung |
| Sensoren | Beschleunigungsmesser, Gyroskop (manchmal auch Magnetometer) | IMU + Magnetometer (manchmal GPS) | IMU + Erweiterte Algorithmen (oft mit GPS oder externen Eingängen) |
| Datenausgabe | Rohdaten (Beschleunigung, Winkelgeschwindigkeit) | Orientierung (Neigung, Rollen, Gieren), Kurs | Position, Geschwindigkeit und Orientierung im Zeitverlauf |
| Extern | Für die vollständige Orientierung sind externe Systeme (GPS, Magnetometer) erforderlich | Nutzt Magnetometer und GPS zur Driftkorrektur | Funktioniert eigenständig (kann mit GPS erweitert werden) |
| FOG IMU-Typ | Preisklasse | Anwendung |
|---|---|---|
| Einstiegs-FOG-IMUs | $10,000 - $30,000 | Allgemeine gewerbliche oder industrielle Nutzung, Drohnen, einfache autonome Fahrzeuge |
| Mittelklasse-FOG-IMUs | $30,000 - $70,000 | Anwendungen in Militärqualität, Luft- und Raumfahrt, hochpräzise Schiffsnavigation |
| Hochwertige FOG-IMUs | $70,000 - $100,000+ | Kritische Anwendungsbereiche (Raketenlenkung, Luft- und Raumfahrt, hochpräzise Verteidigungssysteme) |
In welcher Preisspanne befinden sich FOG-IMUs?
Preisspanne von
FOG-basierten Inertialmesseinheiten (IMU)
Der Preis einer faseroptischen Gyroskop (FOG) basierenden Inertialmesseinheit (IMU) kann je nach Anwendung, Leistungsanforderungen und Zusatzfunktionen erheblich variieren. Zu den preisbeeinflussenden Faktoren gehören:
- Leistungsmerkmale (z. B. Genauigkeit, Stabilität)
- Größe, Gewicht und Stromverbrauch (SWaP-C)
- Umweltschutz (z. B. Robustheit für raue Bedingungen)
- Anpassung an spezifische Anwendungsanforderungen
Preisinformationen zu MEMS IMU finden Sie auf unserer MEMS IMU- Seite.
Auswahlleitfaden für Inertialmessgeräte
Wie wählt man
eine Trägheitsmesseinheit aus?
SCHRITT 1
Definieren Sie Ihre Anwendung
Was ist Ihr primärer Anwendungsfall? (z. B. Luft- und Raumfahrt, Verteidigung, Robotik, Automobilindustrie, Unterhaltungselektronik)
Welche Genauigkeit und Präzision ist erforderlich? (z. B. Subgrad, hohe Präzision)
SCHRITT 2
IMU-Typ: MEMS vs. FOG-basiert
- MEMS : Preiswert, kompakt und ideal für niedrige bis mittlere Genauigkeit.
- FOG : Hochpräzise, zuverlässig und geeignet für anspruchsvolle Anwendungen.
SCHRITT 3
Genauigkeitsanforderungen ermitteln
Wählen Sie den für Ihre Anwendung erforderlichen Genauigkeitsgrad (z. B. Grad pro Stunde für Gyroskope).
SCHRITT 4
Größe und Gewicht
Achten Sie darauf, dass die IMU zu den Platz- und Leistungsbeschränkungen Ihres Systems passt, insbesondere bei Drohnen oder tragbaren Geräten.
SCHRITT 5
Beurteilung der Umweltbedingungen
Wählen Sie eine IMU, die Umwelteinflüssen wie extremen Temperaturen, Stößen und Vibrationen standhält.
SCHRITT 6
Anpassungs- und Integrationsoptionen
Stellen Sie sicher, dass die IMU die richtigen Schnittstellen und Datenausgabe unterstützt, um eine nahtlose Integration in Ihr System zu gewährleisten.
Hersteller von Trägheitsmessgeräten
Warum Guidenav wählen?
Von Schlüsselakteuren geschätzt
Unsere hochentwickelten Trägheitsnavigationsprodukte genießen das Vertrauen führender Organisationen aus den Bereichen Luft- und Raumfahrt, Verteidigung, Handel und Industrie in über 25 Ländern. Unsere Zuverlässigkeit und Präzision zeichnen uns aus.
Spitzenleistung
Unsere Produkte bieten Spitzenleistung mit exzellenter Bias-Stabilität. Entwickelt für anspruchsvollste Anwendungen, erreicht unsere MEMS-basierte IMU eine Bias-Instabilität von bis zu ≤0,1°/h.
Bewährt in rauer Umgebung
Unsere Lösungen sind so konzipiert, dass sie extremen Bedingungen standhalten und auch in rauen Umgebungen eine gleichbleibende Leistung erbringen.
Hervorragende Leistung bei Vibrationen
Unsere MEMS- und FOG-IMU-Technologie zeichnet sich durch ihre Leistungsfähigkeit bei starken Vibrationen aus und gewährleistet Genauigkeit und Stabilität auch unter anspruchsvollsten Betriebsbedingungen.
PLUG & PLAY-System
Unsere Systeme sind auf einfache Integration ausgelegt und bieten Plug-and-Play-Lösungen, die die Installation vereinfachen und die Einrichtungszeit verkürzen, sodass Sie sich auf Ihre Mission konzentrieren können.
ITAR-FREI
Unsere Produkte unterliegen nicht den ITAR-Bestimmungen und bieten Ihnen somit den Vorteil einfacherer internationaler Transaktionen und weniger regulatorischer Hürden. Entscheiden Sie sich für GuideNav für reibungslose globale Geschäftsabläufe.
Unsere Fabrik – Überzeugen Sie sich selbst








Warum Sie sich für uns entscheiden sollten
Umfassende Lösungen für alle Ihre Navigationsanforderungen
Gewerbliche Abdeckung
Bias-Stabilität: >0,2°/h
Lösung: MEMS-basiertes Gyroskop/IMU/INS
Anwendungen: Fahrzeugnavigation, unbemannte Luftfahrzeuge, Transportwesen, Robotik usw.
Taktische Schutzklasse
Bias-Stabilität: 0,05°/h-0,2°/h
Lösung: Faseroptische und MEMS-basierte Gyroskope/IMU/INS
Anwendungen: Operationen von gepanzerten Fahrzeugen, Flugabwehrartillerie, Präzisionszielerfassung usw.
Navigationsgradabdeckung
Bias-Stabilität: ≤0,05°/h
Lösung: Faseroptik & Ringlaser Gyroskop/IMU/INS
Anwendungen: Mittel- und Langstreckenführung, Militärluftfahrt, Satelliten




Häufig gestellte Fragen zur Inertialmesseinheit
Antworten auf Ihre Fragen
Die Hauptfunktionen einer IMU bestehen darin, Echtzeit-Orientierungsinformationen (wie Nick-, Roll- und Gierwinkel) und Bewegungsinformationen (wie lineare Beschleunigung und Winkelgeschwindigkeit) bereitzustellen. Diese Daten unterstützen Systeme wie Roboter, Drohnen, mobile Geräte oder intelligente Fahrzeuge bei Navigation, Positionierung und Steuerung.
GPS liefert geografische Positions- und Geschwindigkeitsinformationen über Satellitenpositionierung, während eine IMU mithilfe interner Sensormessungen relative Bewegungs- und Orientierungsänderungen ermittelt. IMUs funktionieren ohne externe Positionssignale und sind daher besonders nützlich in Umgebungen, in denen GPS-Signale nicht verfügbar oder unzuverlässig sind (z. B. in Innenräumen, Tunneln oder unter Wasser). Die Kombination von IMU- und GPS-Daten führt in der Regel zu einer genaueren und zuverlässigeren Positionsbestimmung und Navigation.
Typische IMU-Ausgaben umfassen:
- Drei-Achsen-Beschleunigungsmesserdaten (X, Y, Z)
- Drei-Achsen-Gyroskopdaten (X, Y, Z)
- (Falls vorhanden) Daten des Drei-Achsen-Magnetometers
- (Falls vorhanden) Daten zu Luftdruck und Höhe
Wir bieten zwei Haupttypen von IMUs an:
- MEMS-IMUs : Kleiner, leichter und kostengünstiger, ideal für Anwendungen mit mittlerer Präzision. Wir bieten auch hochpräzise MEMS-IMUs mit einer Genauigkeit von bis zu 0,1°/h , vergleichbar mit Einstiegs- FOGs .
- FOG-IMUs : Hochpräzise und stabil, eingesetzt in anspruchsvollen Anwendungen wie Luft- und Raumfahrt, Verteidigung und High-End-Navigationssystemen.
Ja, die IMUs von GuideNav eignen sich hervorragend für militärische Anwendungen . Dank ihres Fokus auf hohe Präzision, Langlebigkeit und Anpassbarkeit erfüllen unsere IMUs die anspruchsvollen Anforderungen sensibler Verteidigungsoperationen, darunter Unterwasseraufklärung, Überwachung und Aufklärungsmissionen.
Ja, Sie können Ihre vorhandene IMU durch unser Produkt ersetzen. Unsere IMU ist so konzipiert, dass sie mit einer Vielzahl von Systemen und Anwendungen kompatibel ist. Hier einige wichtige Punkte, die Sie beachten sollten:
Kompatibilität: Unsere IMU unterstützt Standard-Kommunikationsprotokolle (wie SPI, I2C und UART) und bietet vergleichbare oder verbesserte Spezifikationen im Vergleich zu den meisten bestehenden IMUs. Dadurch ist eine problemlose Integration in Ihr bestehendes System gewährleistet.
Verbesserte Leistung: Unsere IMU bietet höhere Genauigkeit, geringeres Rauschen und bessere Stabilität, was die Gesamtleistung Ihrer Anwendung steigern kann.
Zusätzliche Funktionen: Je nach Modell können unsere IMUs zusätzliche Sensoren (wie Magnetometer) und erweiterte Datenverarbeitungsfunktionen beinhalten, die umfassendere Bewegungs- und Orientierungsdaten liefern.
Unterstützung und Dokumentation: Wir stellen Ihnen eine detaillierte Dokumentation und technischen Support zur Verfügung, um Sie beim Austauschprozess zu unterstützen und einen reibungslosen Übergang ohne nennenswerte Ausfallzeiten zu gewährleisten.
Anpassung: Sollten Sie spezielle Anforderungen haben, kann unser Team mit Ihnen zusammenarbeiten, um die IMU-Einstellungen oder die Firmware so anzupassen, dass sie besser zu Ihren Anwendungsbedürfnissen passen.