
Unsere MEMS-basierte Inertialmesseinheit
MEMS-Trägheitsmesseinheit
Mehr als 15.000 Systeme sind in über 35 Ländern im Einsatz
Maßgeschneiderte Lösungen, denen globale Schlüsselakteure vertrauen
Die MEMS-basierte Inertialmesseinheit (IMU) von GuideNav steht für höchste Präzision und Zuverlässigkeit. Unsere IMUs sind auf herausragende Leistung ausgelegt und liefern präzise Messungen von Winkelgeschwindigkeit und linearer Beschleunigung – unerlässlich für Navigations- und Steuerungssysteme in der Luft- und Raumfahrt, der Verteidigungsindustrie und in industriellen Anwendungen.
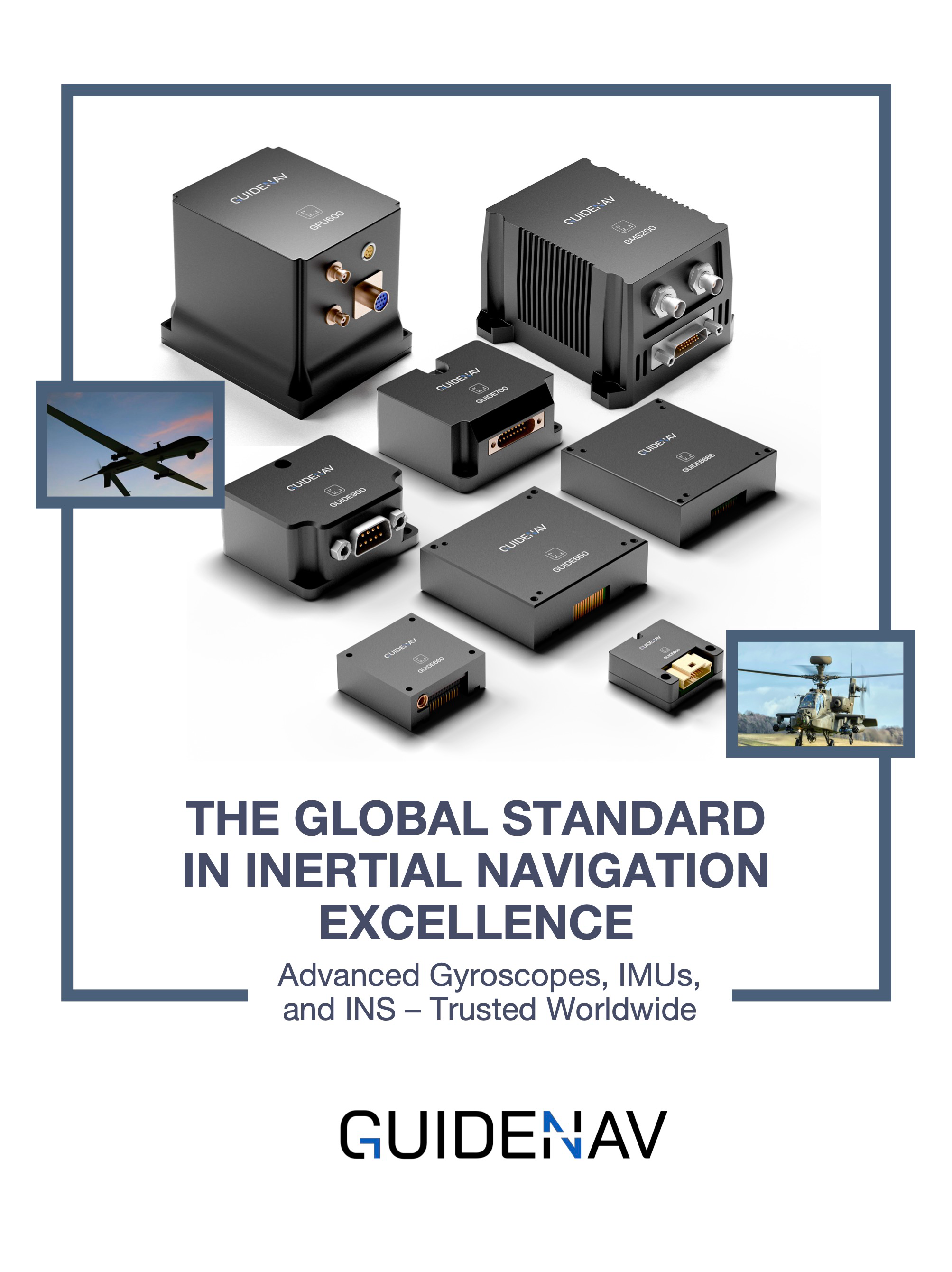
Guidenavs vorgestelltes MEMS-Trägheitsmesssystem (Modell)
HOCHGENAUE
MEMS-IMU-MODELLE
Als führender Hersteller von MEMS-IMUs bietet GuideNav ein umfassendes Sortiment hochpräziser MEMS-Inertialmesseinheiten, die auf die vielfältigen Anforderungen unterschiedlichster Branchen zugeschnitten sind – von der Luft- und Raumfahrt über die Verteidigung bis hin zur Industrieautomation und Robotik. Unsere Lösungen umfassen sowohl Standard- als auch kundenspezifische IMUs, die exakt auf Ihre Bedürfnisse abgestimmt sind.
Wir bieten Ihnen zudem nahtlose Ersatzlösungen für Ihre bestehenden Systeme und gewährleisten so die Kompatibilität mit Ihren aktuellen Schnittstellen ohne Integrationsprobleme. Kontaktieren Sie einfach unsere Experten, um detaillierte Spezifikationen und maßgeschneiderte Lösungen für Ihre Projekte zu besprechen.





Sichern Sie sich jetzt Ihre individuelle Lösung!
Ihr Projekt verdient eine Lösung, die exakt auf Ihre Anforderungen zugeschnitten ist. Um Ihnen die optimale Inertialmesseinheit (IMU) für Ihre Bedürfnisse zu liefern, bitten wir Sie, uns die spezifischen Parameter und Leistungsanforderungen Ihrer Anwendungen mitzuteilen. Ob Präzision, Stabilität oder Größenbeschränkungen – unser Team unterstützt Sie gerne bei der Suche nach der perfekten Lösung.
Inhaltsverzeichnis
Laden Sie diese Seite als PDF herunter
Um Ihnen Zeit zu sparen, haben wir auch eine PDF-Version vorbereitet, die den gesamten Inhalt dieser Seite enthält. Hinterlassen Sie einfach Ihre E-Mail-Adresse und Sie erhalten umgehend den Download-Link.

Einführung der Inertialmesseinheit (IMU)
Was ist eine Inertialmesseinheit (IMU)?
Eine Inertialmesseinheit (IMU) ist ein hochentwickeltes Sensorsystem, das die Bewegung und Orientierung eines Objekts im dreidimensionalen Raum präzise erfasst. Sie kombiniert mehrere Sensoren, typischerweise Beschleunigungsmesser und Gyroskope, um die lineare Beschleunigung bzw. die Winkelgeschwindigkeit zu messen. In manchen Konfigurationen sind zusätzlich Magnetometer integriert, um weitere Orientierungsdaten relativ zum Erdmagnetfeld zu liefern.
IMUs spielen eine entscheidende Rolle in Navigations- und Steuerungssystemen verschiedener sicherheitskritischer Branchen wie Luft- und Raumfahrt, Verteidigung und autonomen Systemen. Durch die Bereitstellung hochpräziser Echtzeitdaten zu Position, Geschwindigkeit und Orientierung gewährleisten IMUs die Stabilität und Genauigkeit komplexer Systeme unter dynamischen Bedingungen und ermöglichen so einen zuverlässigen Betrieb selbst in Umgebungen mit starken Vibrationen, Stößen oder anderen Störkräften.
MEMS-Inertialmesseinheit (MEMS IMU) ENTDECKEN
Wie funktioniert ein MEMS-IMU?
Eine MEMS-IMU (Inertial Measurement Unit) arbeitet mit mehreren Sensoren, typischerweise MEMS-Beschleunigungsmessern und Gyroskopen, um Bewegung und Orientierung zu messen. Der Beschleunigungsmesser erfasst die lineare Beschleunigung in drei Achsen, während das Gyroskop die Drehbewegung um diese Achsen misst. Diese Sensoren sammeln Daten zu Position, Geschwindigkeit und Orientierung des Objekts, die anschließend verarbeitet werden, um präzise Navigations- und Steuerungsinformationen in Echtzeit bereitzustellen. MEMS-IMUs sind kompakt, energieeffizient und hochgenau und eignen sich daher ideal für Anwendungen in der Luft- und Raumfahrt, der Verteidigung, der Robotik und in autonomen Systemen.
Inertialmesseinheit vs. Gyroskop (nur)
Warum sollte man eine komplexe MEMS-IMU anstelle eines einfachen Gyroskops verwenden?
Ein Gyroskop misst zwar die Winkelgeschwindigkeit, unterliegt aber einer Drift im Laufe der Zeit und kann daher keine absolute Position oder Orientierung liefern. Eine IMU integriert Beschleunigungsmesser und Magnetometer mit dem Gyroskop, um die Drift zu korrigieren, eine anfängliche Orientierung zu gewährleisten und umfassende 3D-Bewegungsdaten zu liefern. Dadurch wird eine präzise und zuverlässige Lagemessung über die Zeit sichergestellt.
Driftkorrektur: Gyroskope allein unterliegen mit der Zeit einer Drift. Eine IMU enthält Beschleunigungsmesser und Magnetometer, um diese Drift zu korrigieren und die Genauigkeit aufrechtzuerhalten.
Anfangsorientierung: Ein Gyroskop kann keine Anfangsorientierung liefern, eine IMU hingegen schon, indem sie Beschleunigungsmesser zur Erfassung der Schwerkraft und Magnetometer zur Bestimmung der Richtung verwendet.
Umfassende 3D-Bewegungsdaten: IMUs messen nicht nur die Rotation, sondern auch die lineare Beschleunigung und liefern so ein vollständiges Bild der Bewegung in drei Dimensionen.
Verbesserte Genauigkeit: Durch die Kombination von Daten aus mehreren Sensoren liefert eine IMU genauere und zuverlässigere Lagemessungen, insbesondere über lange Zeiträume.


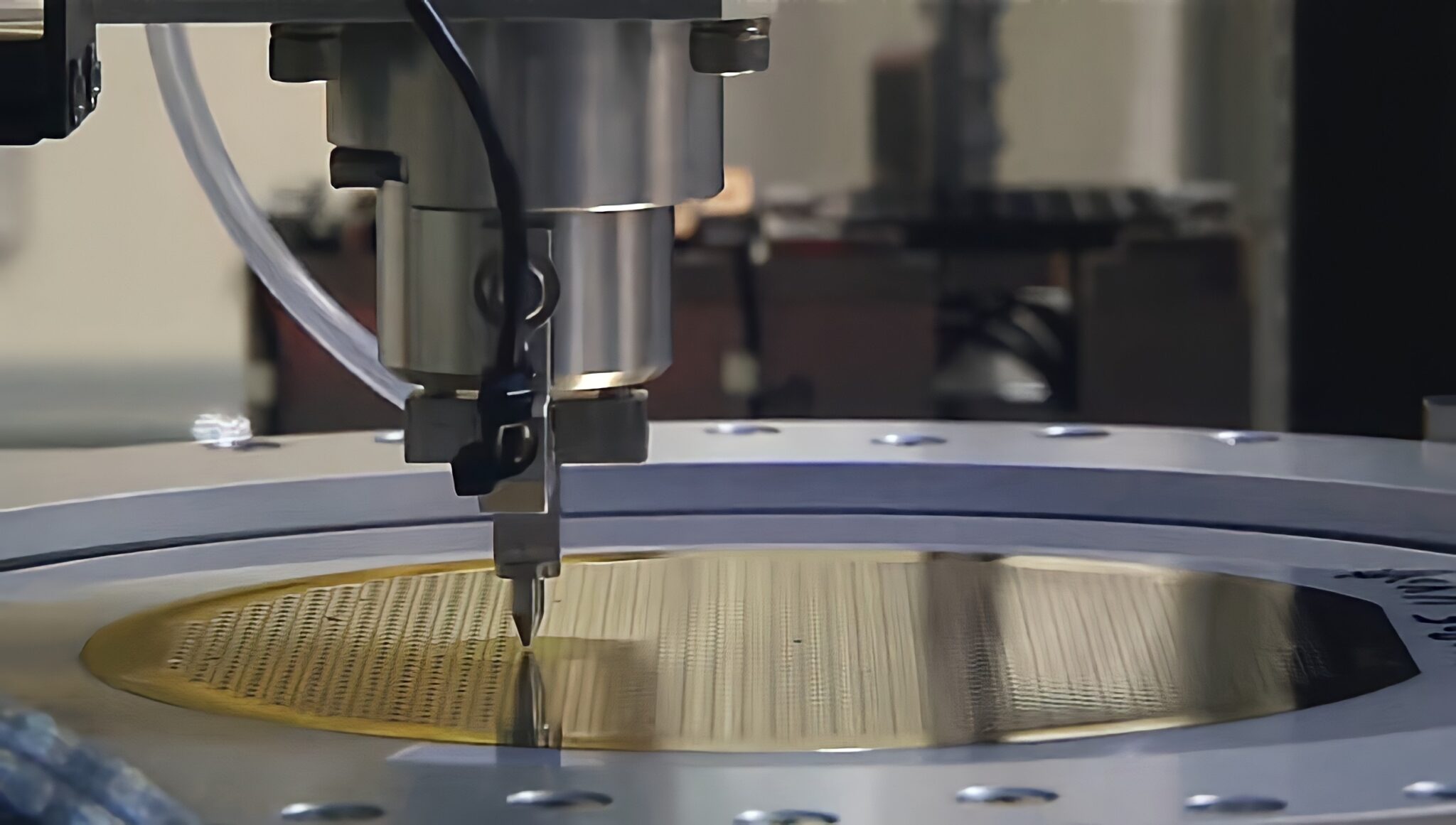
Herstellungsprozess einer MEMS-Trägheitsmesseinheit
Herstellungsprozess von MEMS-IMU
01
SCHRITT 1: Kundenspezifische Anpassung und Parameterdefinition
Definieren Sie Schlüsselparameter wie Driftgeschwindigkeit, Rauschdichte, Temperaturdrift und Linearität anhand der spezifischen Anwendungsanforderungen des Kunden. Stellen Sie sicher, dass diese Parameter die geforderte Präzision, Stabilität und Umweltverträglichkeit erfüllen. Entwerfen und fertigen Sie die MEMS-Sensoren, einschließlich Beschleunigungsmesser und Gyroskope, und integrieren Sie diese in ein einzelnes Modul.
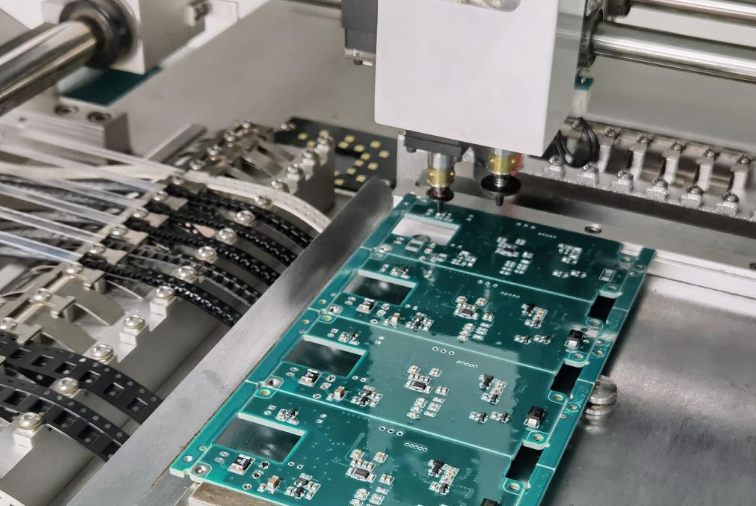
02
STPE 2: Schaltungsdesign & Integration
Entwerfen und integrieren Sie die Schaltungen zur Sensorsignalverarbeitung, einschließlich Signalverstärkung, Filterung und Analog-Digital-Wandlung. Diese Funktionen werden typischerweise in einen ASIC oder Mikrocontroller integriert, um eine hohe Integrationsebene zu erreichen.
03
STPE 3: Automatisierte Kalibrierung
Um die Genauigkeit und Stabilität der Sensoren zu gewährleisten, führen Sie an den Beschleunigungsmessern und Gyroskopen eine Nullpunktkalibrierung, dynamische Tests und eine Temperaturkompensation mithilfe einer automatisierten Testplattform durch.
04
STPE 4: Verpackung & Prüfung
Die MEMS-Chips und -Schaltungen werden kompakt verpackt und Umweltverträglichkeitstests wie Temperatur-, Vibrations- und Schocktests durchgeführt, um die Zuverlässigkeit und Leistungsfähigkeit der IMU unter verschiedenen Bedingungen zu gewährleisten.


MEMS-Inertialmesseinheit (MEMS IMU) ENTDECKEN
Bedeutet MEMS-IMU gleichbedeutend mit „geringer Genauigkeit“?
Nicht unbedingt. Während Standard-MEMS-IMUs typischerweise mit einer moderaten Genauigkeit in Verbindung gebracht werden, hochpräzise taktische MEMS-IMUs eine Bias-Instabilität von nur 0,1°/h (GUIDE900), ein Niveau, das mit Einsteiger-Fiber Optic Gyroscope (FOG)-IMUs vergleichbar ist.
- Standard-MEMS-IMUs: Diese sind kostengünstig und eignen sich für Anwendungen, bei denen eine moderate Genauigkeit ausreicht, wie z. B. Unterhaltungselektronik, industrielle Automatisierung und Drohnen.
- Hochpräzise MEMS-IMUs: Dank verbesserter Design- und Fertigungsprozesse erfüllen einige moderne MEMS-IMUs mittlerweile die Genauigkeitsanforderungen militärischer und luft- und raumfahrttechnischer Anwendungen. Sie gewährleisten zuverlässige Leistung in Navigationssystemen, UAVs und sogar Lenkwaffensystemen.
Es ist jedoch wichtig zu beachten, dass selbst hochpräzise MEMS-IMUs im Vergleich zu FOG-IMUs, die besser für missionskritische Anwendungen geeignet sind, die eine möglichst geringe Drift und höchste Genauigkeit erfordern, immer noch Einschränkungen hinsichtlich der Langzeitdrift und der ultrahohen Stabilität aufweisen.


MEMS-IMU oder Nebel-IMU – Welche ist besser?
FOG-IMU: Sie bleiben die bevorzugte Wahl für hochpräzise Anwendungen, insbesondere dort, wo Langzeitstabilität entscheidend ist, wie beispielsweise in der Luft- und Raumfahrt, der Präzisionsnavigation und der Verteidigung. Trotz ihrer größeren Abmessungen und höheren Kosten faseroptische Gyroskop- IMUs durch ihre hervorragende Leistung unter extremen Umgebungsbedingungen aus.
MEMS-IMU: Dank technologischer Fortschritte erreichen MEMS-IMUs in vielen Anwendungsbereichen eine mit FOG-Gyroskopen mittlerer Leistungsklasse vergleichbare Genauigkeit und finden breite Anwendung sowohl im militärischen als auch im zivilen Hochpräzisionsbereich. Ihre Stärken liegen in der Miniaturisierung, dem geringen Stromverbrauch und der Vielseitigkeit für diverse Anwendungen.
| Besonderheit | Nebel-IMU | MEMS IMU |
|---|---|---|
| Funktionsprinzip | Misst die Winkelgeschwindigkeit basierend auf dem Sagnac-Effekt bei faseroptischer Interferenz | Misst Beschleunigung und Winkelgeschwindigkeit mittels mikromechanischer Strukturen in der MEMS-Technologie |
| Genauigkeit | Hohe Genauigkeit, ideal für anspruchsvolle Navigations- und Steuerungsanwendungen, insbesondere mit Blick auf die Langzeitstabilität | Breites Genauigkeitsspektrum; einige High-End-MEMS-IMUs erreichen eine vergleichbare Genauigkeit wie FOG-Gyroskope der Mittelklasse und eignen sich für verschiedene Anwendungen, einschließlich militärischer Szenarien |
| Driftgeschwindigkeit | Typischerweise zeichnet es sich durch eine sehr geringe Driftrate aus und ist daher für den langfristigen Dauerbetrieb geeignet | Die Driftrate hat sich durch technologische Fortschritte deutlich verbessert; einige High-End-Modelle können mit FOG-IMUs mithalten |
| Größe und Gewicht | Größer und schwerer, geeignet für hochpräzise Anwendungen, bei denen Platz und Gewicht keine Rolle spielen | Kompakt und leicht, ideal für Anwendungen mit begrenztem Platzangebot, weit verbreitet in tragbaren Geräten und militärischen Anwendungen |
| Stromverbrauch | Höherer Stromverbrauch, geeignet für Systeme, bei denen der Stromverbrauch keine große Rolle spielt | Geringer Stromverbrauch, ideal für batteriebetriebene tragbare Geräte und Langzeiteinsätze |
| Kosten | Höhere Produktionskosten, geeignet für High-End-Anwendungen | Die Kosten variieren von niedrig bis mittel und eignen sich für groß angelegte Anwendungen im Konsumgüter-, Industrie- und Militärbereich |
| Störfestigkeit | Unempfindlich gegenüber elektromagnetischen Störungen, ideal für komplexe elektromagnetische Umgebungen | Die Störfestigkeit hat sich durch Fortschritte in Design und Gehäusetechnik verbessert; die meisten MEMS-IMUs bieten mittlerweile eine gute Beständigkeit gegenüber elektromagnetischen Störungen |
| Temperaturstabilität | Ausgezeichnete Temperaturstabilität, geeignet für extreme Umgebungen | Durch Temperaturkompensationstechniken arbeiten viele High-End-MEMS-IMUs über einen weiten Temperaturbereich stabil |
| Anwendungen | Hochpräzise Navigation, Luft- und Raumfahrt, Schifffahrt, Verteidigung und andere High-End-Anwendungen | Weit verbreitet in Unterhaltungselektronik, Drohnen, Militärausrüstung, Industrieautomation, Automobilelektronik und mehr |
Preis für eine MEMS-Trägheitsmesseinheit
In welcher Preisspanne befindet sich ein MEMS-IMU?
Der Preis von MEMS-basierten Inertialmesseinheiten (IMUs) wird hauptsächlich durch die Genauigkeit des Gyroskops (gemessen in Grad pro Stunde, °/h) bestimmt. Diese gibt an, wie präzise die Einheit die Winkelgeschwindigkeit messen kann. Je höher die Genauigkeit, desto höher die Kosten. Hier finden Sie eine Übersicht der typischen Preise, basierend auf den verschiedenen Genauigkeitsstufen.
Bitte beachten Sie, dass diese Preisspannen nur Richtwerte. Die tatsächlichen Kosten einer MEMS-IMU können je nach Faktoren wie der Anpassung an zusätzliche Funktionen variieren.
| Genauigkeitsbereich (°/h) | Preisspanne (pro Einheit) | Typische Anwendungen |
|---|---|---|
| Niedrige Präzision (1°/h - 10°/h) | $20 - $1,000 | Unterhaltungselektronik, IoT-Geräte, grundlegende Bewegungserkennung |
| Mittlere Präzision (0,5°/h - 1°/h) | $1,000 - $5,000 | Drohnen, Robotik, industrielle Automatisierung, Navigationssysteme |
| Hohe Präzision (0,1°/h - 0,5°/h) | $5,000 - $15,000 | Luft- und Raumfahrt, Fahrzeugnavigation, Verteidigung, High-End-Robotik |
Eine Schritt-für-Schritt-Anleitung, die Ihnen hilft, die richtige IMU zu finden
Wie man die richtige MEMS-Inertialmesseinheit (IMU) auswählt/anpasst
SCHRITT 1
Anwendungsanforderungen definieren
Arbeiten Sie mit dem Entwicklungsteam von GuideNav zusammen, um die spezifischen Anwendungsszenarien und Leistungsanforderungen zu ermitteln, wie z. B. Genauigkeit, Driftgeschwindigkeit, Umgebungsbedingungen und Größenbeschränkungen.
SCHRITT 2
Leistungsspezifikationen auswerten
Wichtige Kennzahlen wie Bias-Instabilität, Winkel-Random-Walk (ARW) und Dynamikbereich sind entscheidend. Hochpräzise MEMS-IMUs erreichen eine Bias-Instabilität von 0,1°/hund eignen sich damit für anspruchsvolle Anwendungen wie Navigations- und Leitsysteme.
SCHRITT 3
Bewertung der Umweltrobustheit
Berücksichtigen Sie die Betriebsbedingungen. Militärische und industrielle Anwendungen benötigen IMUs, die hohen Stößen, Vibrationen und extremen Temperaturen standhalten können, während kommerzielle Systeme möglicherweise weniger strenge Anforderungen haben.
SCHRITT 4
Anpassungsoptionen
Bieten Sie Anpassungsmöglichkeiten für die IMU an, einschließlich spezifischer Sensorkonfigurationen, Gehäusematerialien und Schnittstellentypen, um Ihren individuellen Anforderungen gerecht zu werden.
SCHRITT 5
Prototyp und Validierung
Entwickeln Sie einen Prototyp auf Basis der ausgewählten Spezifikationen und führen Sie strenge Tests durch, um zu bestätigen, dass die IMU alle Leistungskriterien und Anwendungsanforderungen erfüllt.
SCHRITT 6
Integration und Kompatibilität
Nach erfolgreicher Validierung finalisieren wir die IMU-Konfiguration und unterstützen Sie bei der Integration in Ihr System, wobei wir Ihnen bei allen notwendigen Anpassungen behilflich sind.
Unsere Vorteile
Warum Guidenav wählen?
Von Schlüsselakteuren geschätzt
Unsere hochentwickelten Trägheitsnavigationsprodukte genießen das Vertrauen führender Organisationen aus den Bereichen Luft- und Raumfahrt, Verteidigung, Handel und Industrie in über 25 Ländern. Unsere Zuverlässigkeit und Präzision zeichnen uns aus.
Spitzenleistung
Unsere Produkte bieten Spitzenleistung mit exzellenter Bias-Stabilität. Entwickelt für anspruchsvollste Anwendungen, erreicht unsere MEMS-basierte IMU eine Bias-Instabilität von bis zu ≤0,1°/h.
Bewährt in rauer Umgebung
Unsere Lösungen sind so konzipiert, dass sie extremen Bedingungen standhalten und auch in rauen Umgebungen eine gleichbleibende Leistung erbringen.
Hervorragende Leistung bei Vibrationen
Unsere MEMS- und FOG-IMU-Technologie zeichnet sich durch ihre Leistungsfähigkeit bei starken Vibrationen aus und gewährleistet Genauigkeit und Stabilität auch unter anspruchsvollsten Betriebsbedingungen.
PLUG & PLAY-System
Unsere Systeme sind auf einfache Integration ausgelegt und bieten Plug-and-Play-Lösungen, die die Installation vereinfachen und die Einrichtungszeit verkürzen, sodass Sie sich auf Ihre Mission konzentrieren können.
ITAR-FREI
Unsere Produkte unterliegen nicht den ITAR-Bestimmungen und bieten Ihnen somit den Vorteil einfacherer internationaler Transaktionen und weniger regulatorischer Hürden. Entscheiden Sie sich für GuideNav für reibungslose globale Geschäftsabläufe.
Unsere Fabrik – Überzeugen Sie sich selbst








Warum Sie sich für uns entscheiden sollten
Umfassende Lösungen für alle Ihre Navigationsanforderungen
Gewerbliche Abdeckung
Bias-Stabilität: >0,2°/h
Lösung: MEMS-basiertes Gyroskop/IMU/INS
Anwendungen: Fahrzeugnavigation, unbemannte Luftfahrzeuge, Transportwesen, Robotik usw.
Taktische Schutzklasse
Bias-Stabilität: 0,05°/h-0,2°/h
Lösung: Faseroptische und MEMS-basierte Gyroskope/IMU/INS
Anwendungen: Operationen von gepanzerten Fahrzeugen, Flugabwehrartillerie, Präzisionszielerfassung usw.
Navigationsgradabdeckung
Bias-Stabilität: ≤0,05°/h
Lösung: Faseroptik & Ringlaser Gyroskop/IMU/INS
Anwendungen: Mittel- und Langstreckenführung, Militärluftfahrt, Satelliten




Häufig gestellte Fragen
Antworten auf Ihre Fragen
Eine MEMS-Inertialmesseinheit (IMU) ist ein kompaktes Gerät, das mithilfe von mikroelektromechanischen Systemen (MEMS) Bewegungsparameter wie Beschleunigung und Winkelgeschwindigkeit misst. Sie kombiniert Beschleunigungsmesser und Gyroskope, um Orientierung und Bewegung im dreidimensionalen Raum zu erfassen. Die gesammelten Daten sind für Anwendungen, die eine präzise Bewegungserfassung erfordern, unerlässlich.
Die MEMS-IMUs von GuideNav eignen sich ideal für eine Vielzahl von Anwendungen, die höchste Präzision und Zuverlässigkeit erfordern. Dazu gehören Luft- und Raumfahrt, Verteidigung, autonome Fahrzeuge, Robotik, industrielle Systeme, Tiefseeforschung und Pipeline-Positionierung. Unsere IMUs bewähren sich selbst unter rauen Bedingungen, wo Stabilität und Genauigkeit entscheidend sind. Darüber hinaus bieten wir kundenspezifische Lösungen mit unterschiedlichen Präzisionsstufen, um den individuellen Anforderungen verschiedener Branchen gerecht zu werden. Kontaktieren Sie uns für eine maßgeschneiderte Lösung, die Ihren spezifischen Anwendungsanforderungen entspricht.
Wichtige Kennzahlen sind Bias-Stabilität, Winkel-Random-Walk, Bandbreite und Temperaturkompensation. Wir bieten verschiedene Modelle mit unterschiedlichen Leistungsspezifikationen an, um den individuellen Anforderungen jeder Anwendung gerecht zu werden. Anpassungen sind möglich, um die Spezifikationen exakt an Ihre Projektanforderungen anzupassen – kontaktieren Sie uns für weitere Informationen.
Die MEMS-IMUs von GuideNav werden umfassend kalibriert, einschließlich dynamischer und Temperaturkompensation, um Stabilität in allen Umgebungen zu gewährleisten. Unsere Modelle beinhalten zudem fortschrittliche Fehlerkorrektur- und Datenintegritätsalgorithmen. Für Anwendungen mit unterschiedlichen Genauigkeitsanforderungen bieten wir maßgeschneiderte Präzisionslösungen.
GuideNav bietet vielfältige Anpassungsmöglichkeiten, darunter spezifische Schnittstellen (z. B. RS232, RS422), anpassbare Datenausgaberaten, Betriebsbereiche und sogar verschiedene Gehäusematerialien. Wir können die Leistungsmerkmale optimal an die Anforderungen Ihrer Anwendung anpassen. Kontaktieren Sie uns, um eine individuelle Lösung für Ihr Projekt zu entwickeln.
MEMS-IMUs bieten zuverlässige Bewegungserfassung, Stabilität und Robustheit unter extremen Bedingungen – entscheidend für Anwendungen wie Raketenlenkung, Flugzeugnavigation und unbemannte Systeme. Die Lösungen von GuideNav decken unterschiedliche Präzisionsstufen ab, um den vielfältigen Missionsprofilen in diesen Bereichen gerecht zu werden.
Unsere MEMS-IMUs sind für höchste Zuverlässigkeit unter extremen Bedingungen ausgelegt und widerstehen Temperaturen von -40 °C bis +85 °C. Sie bieten zudem eine hohe Beständigkeit gegenüber Vibrationen, Stößen und Feuchtigkeit. Für Anwendungen mit besonderen Betriebsanforderungen bieten wir außerdem kundenspezifische Umgebungsbedingungen.
MEMS-IMUs verwenden Sensoren im Mikromaßstab und sind dadurch kleiner, leichter und oft energieeffizienter als herkömmliche IMUs. Obwohl herkömmliche IMUs in manchen Fällen eine höhere Präzision bieten, bietet GuideNav verschiedene MEMS-Modelle an, die ein optimales Verhältnis von Kosteneffizienz und hoher Leistung gewährleisten. Dank individueller Anpassungsmöglichkeiten können wir die für Sie benötigte Präzision exakt realisieren.
Aber sicher! Auf unserem Blog finden Sie zahlreiche informative Artikel, die die Grundlagen von MEMS-IMUs ausführlich erläutern. Sie können beispielsweise folgende Themen entdecken:
- Wie genau ist die Inertialmesseinheit (IMU)?
- Was ist ein MEMS-IMU?
- Der ultimative Leitfaden für Inertialmesseinheiten (IMU).
Diese Ressourcen helfen Ihnen, die Technologie, Genauigkeit und Anwendungsbereiche von MEMS-IMUs besser zu verstehen. Stöbern Sie gerne und kontaktieren Sie uns bei weiteren Fragen!