Warum sind Alterungstests für Glasfaser-IMU und INS unerlässlich?
Alterungstests für Glasfaser-IMUs und INSs sind keine überflüssigen Kosten – sie sind wissenschaftliche Methoden, um die Haltbarkeit vorherzusagen, Garantiezeiträume festzulegen und die Einsatzzuverlässigkeit unter realen Belastungen sicherzustellen.
Wie führt ein Glasfaser-INS die Navigationsinitialisierung vor einer Mission durch?
Ein Glasfaser-INS wird vor dem Start initialisiert, indem es die Temperatur stabilisiert, Gyroskope und Beschleunigungsmesser ausrichtet, die Abweichung schätzt und eine grobe bis feine Lageausrichtung durchführt – wodurch eine genaue Navigation ab der ersten Flugsekunde gewährleistet wird.
Warum müssen Glasfaser-IMUs regelmäßig eingeschaltet werden?

Durch regelmäßiges Einschalten einer Glasfaser-IMU wird ihre thermische Umgebung stabilisiert, die Bias-Kalibrierung aktualisiert und eine langfristige Verschlechterung elektronischer Komponenten verhindert – wodurch ein schneller Start und eine zuverlässige Leistung gewährleistet werden.
FOG North Finder vs. FOG INS: Was ist der wirkliche Unterschied?
Ein FOG-Nordfinder und ein FOG-INS sind nicht dasselbe. Ein Nordfinder ermittelt die wahre Richtung anhand der Erdrotation, während ein FOG-INS vollständige Navigationsdaten – Position, Geschwindigkeit und Lage – mithilfe von Gyroskopen, Beschleunigungsmessern und Navigationsalgorithmen liefert.
10 häufige Fehler, die Ingenieure bei der Verwendung von faseroptischen Gyroskopen (FOGs) machen
FOGs versagen im Feld oft nicht aufgrund mangelhafter Konstruktion, sondern aufgrund von Anwendungsfehlern – Fehlausrichtung, Vibrationen, unzureichender Kalibrierung oder Nichtbeachtung elektromagnetischer Störungen. Die Vermeidung dieser 10 häufigen Fehler gewährleistet eine optimale Navigationsleistung. GuideNav bietet ITAR-freie FOGs mit fachkundiger Integrationsunterstützung, um Käufern und Ingenieuren zum Erfolg zu verhelfen.
Open-Loop oder Closed-Loop FOG? Den Unterschied verstehen
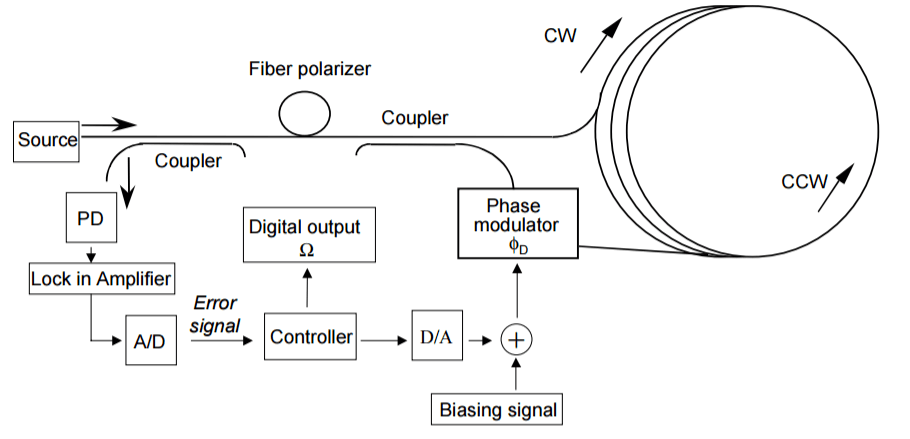
Open-Loop-FOGs sind kompakt und kostengünstig und bieten eine mittlere Genauigkeit (1–10 °/h) für UAVs und Roboter. Closed-Loop-FOGs liefern ultrahohe Präzision (0,001–0,1 °/h) und sind daher für U-Boote, Raketen und Luft- und Raumfahrtsysteme unverzichtbar.
Top 10 MEMS-INS-Lieferanten im Jahr 2025

Zu den Top 10 der MEMS-INS-Anbieter im Jahr 2025 gehören Honeywell, Analog Devices, GuideNav, Safran, TDK InvenSense, STMicroelectronics, Sensonor, Silicon Sensing Systems, Aceinna und SBG Systems.
FOG vs. MEMS in der Unterwassernavigation: Welches ist besser? (Teil II)
FOG-Gyroskope gewährleisten eine extrem geringe Drift und Langzeitstabilität unter Unterwasserbedingungen ohne GNSS-Unterstützung, während MEMS-IMUs kompakte Alternativen mit geringem Stromverbrauch bieten, die sich besser für Inspektionen von kurzer Dauer und kostensensible Plattformen eignen.
FOG vs. MEMS in der Unterwassernavigation: Welches ist besser? (Teil I)
FOG-Gyroskope gewährleisten eine extrem geringe Drift und Langzeitstabilität unter Unterwasserbedingungen ohne GNSS-Unterstützung, während MEMS-IMUs kompakte Alternativen mit geringem Stromverbrauch bieten, die sich besser für Inspektionen von kurzer Dauer und kostensensible Plattformen eignen.
FOG vs. RLG: Bewertung von Genauigkeit, Zuverlässigkeit und Lebenszykluskosten
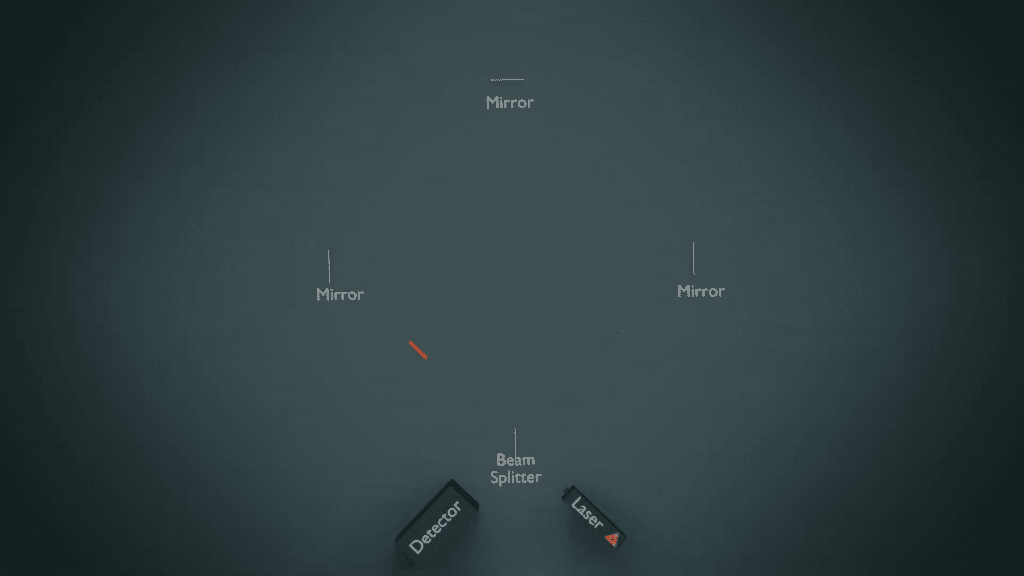
FOG und RLG sind beides etablierte Gyroskoptechnologien für die Verteidigungsnavigation. Vergleicht man sie jedoch aus der Beschaffungsperspektive, bietet FOG die optimale Balance aus Leistung, Zuverlässigkeit und Lebenszykluskosten für nahezu jede Mission außerhalb der strategischen Abschreckung.