FOG vs. MEMS in der Unterwassernavigation: Welches ist besser? (Teil I)
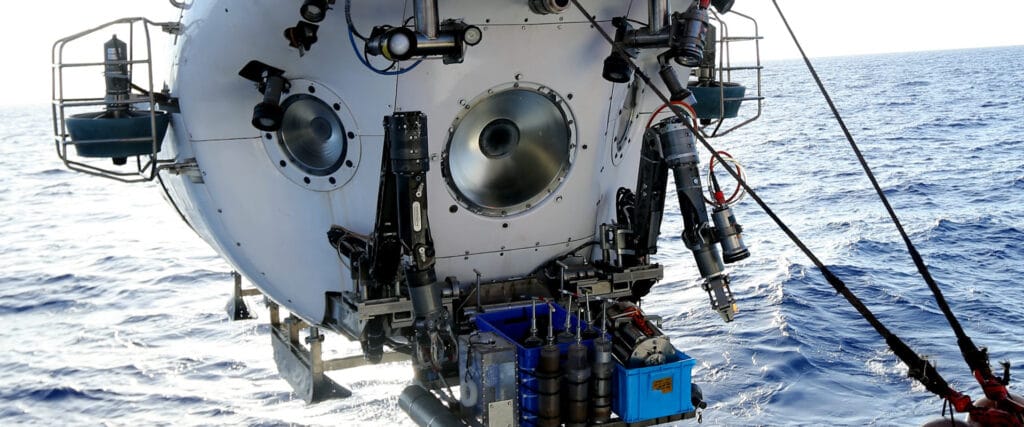
FOG-Gyroskope gewährleisten eine extrem geringe Drift und Langzeitstabilität unter Unterwasserbedingungen ohne GNSS-Unterstützung, während MEMS-IMUs kompakte Alternativen mit geringem Stromverbrauch bieten, die sich besser für Inspektionen von kurzer Dauer und kostensensible Plattformen eignen.
FOG vs. RLG: Bewertung von Genauigkeit, Zuverlässigkeit und Lebenszykluskosten
FOG und RLG sind beides etablierte Gyroskoptechnologien für die Verteidigungsnavigation. Vergleicht man sie jedoch aus der Beschaffungsperspektive, bietet FOG die optimale Balance aus Leistung, Zuverlässigkeit und Lebenszykluskosten für nahezu jede Mission außerhalb der strategischen Abschreckung.
So wählen Sie ein FOG, das Sie integriert, leistungsstark und unterstützt
Die Wahl des falschen faseroptischen Gyroskops (FOG) kann Projektverzögerungen und Kostensteigerungen zur Folge haben. Kluge Käufer achten nicht nur auf das Datenblatt, sondern wählen ein FOG, das sich reibungslos integrieren lässt, zuverlässig funktioniert und mit langfristiger Service- und Liefersicherheit ausgestattet ist.
Thermische Empfindlichkeit in faseroptischen Gyroskopen: Designstrategien für extreme Umgebungen
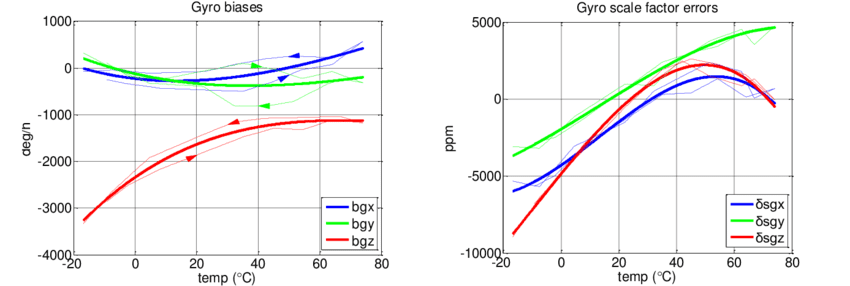
Die thermische Empfindlichkeit von faseroptischen Gyroskopen entsteht durch Materialausdehnung, Brechungsindexverschiebungen und das Verhalten optischer Quellen. Fortschrittliche Strategien – thermische Kompensation, Optimierung der Spulenwicklung und robuste Kalibrierung – ermöglichen es FOGs, auch in extremen Umgebungen ihre Genauigkeit aufrechtzuerhalten.
Design mit ARW im Hinterkopf: Praktische Technik für die IMU-Auswahl (Teil 2)
Der Angle Random Walk (ARW) setzt die ultimative Grenze der IMU-Genauigkeit. Er kann nicht durch Software beseitigt, sondern nur durch die Auswahl rauscharmer Sensoren, ein stabiles thermisches Design, Schwingungsisolierung und effektive Strategien zur Multisensorfusion reduziert werden.
ARW verstehen: Die versteckte Grenze der IMU-Genauigkeit (Teil 1)
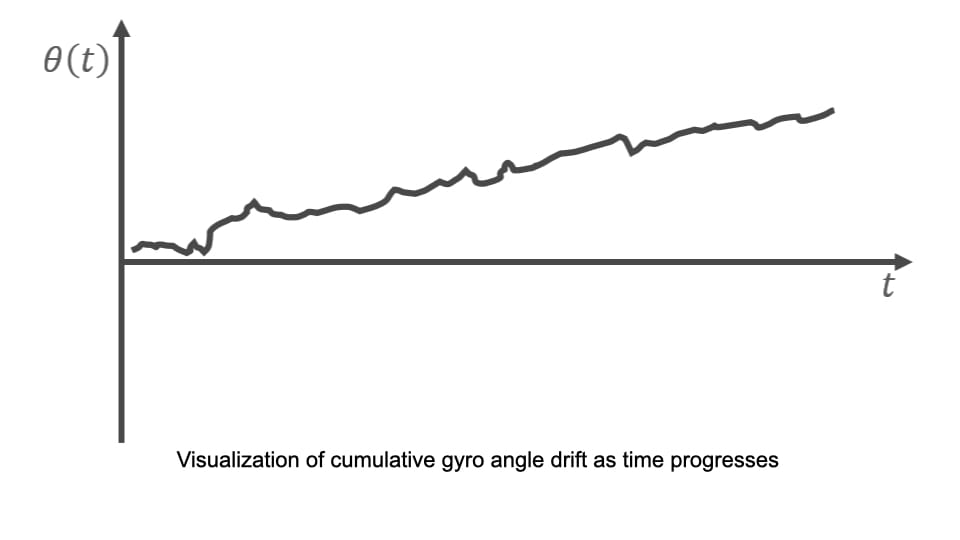
ARW ist keine Spezifikation, sondern eine Uhr. Sobald Ihre IMU startet, zeigt sie Ihnen, wie schnell die Orientierungssicherheit abnimmt. Je niedriger sie ist, desto länger bleibt Ihr System korrekt.
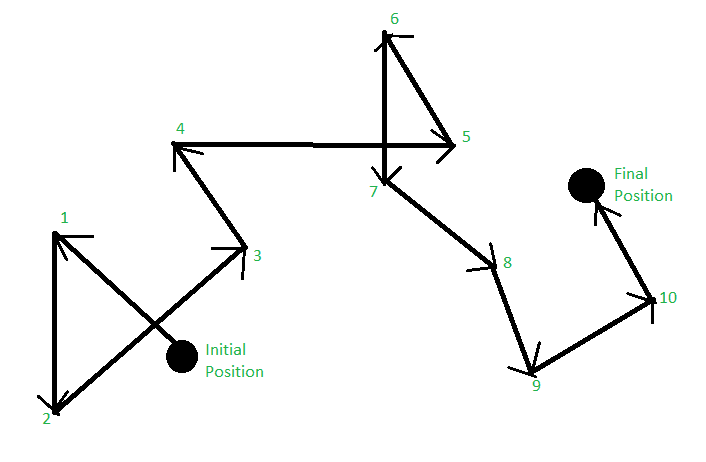
10 Designfehler, die Ingenieure bei der Integration von IMUs machen
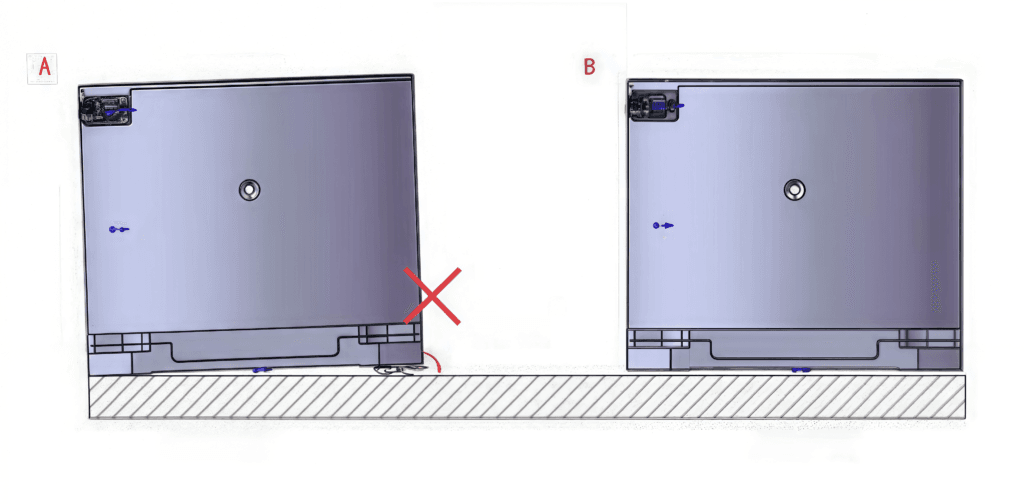
Fehler bei der IMU-Integration können die Navigationszuverlässigkeit beeinträchtigen. Von Fehlausrichtungen und Vibrationen bis hin zu mangelhafter Kalibrierung und übermäßigem Vertrauen in die Sensorfusion – Ingenieure wiederholen oft dieselben Fehler. In diesem Leitfaden untersuchen wir die 10 häufigsten Fehler bei der IMU-Integration, erklären ihre Folgen und bieten Expertenlösungen, die Sie in Ihren eigenen Projekten anwenden können.
FOG-Technologie in der Lageregelung von Raumfahrzeugen: Jenseits der Grenzen von MEMS
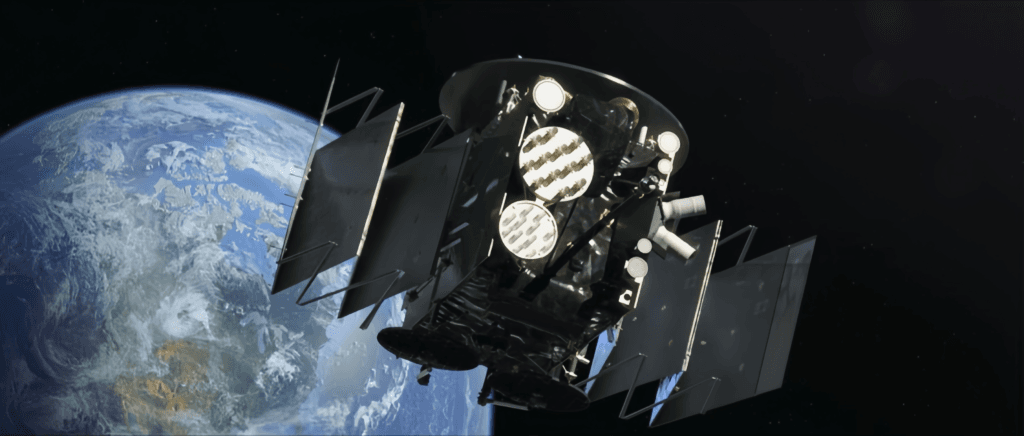
Faseroptische Gyroskope übertreffen MEMS durch ihre Langzeitstabilität, Strahlungsresistenz und Präzision, die über Jahre hinweg zuverlässig bleibt. Sie sind unverzichtbar für Satelliten, Konstellationen und Weltraumsonden, bei denen die Genauigkeit keine Kompromisse eingehen darf.
Wie die Multisensorfusion Trägheitsnavigationssysteme neu definiert

Die Genauigkeit der Trägheitsnavigation wird letztlich dadurch begrenzt, wie gut Sensorfehler modelliert und kompensiert werden. Von der Bias-Drift bis zum Random Walk erfordert eine wirksame Schadensbegrenzung eine Kombination aus Hardware-Design, Kalibrierungsroutinen und algorithmischer Korrektur in Echtzeit.
Top 10 FOG Inertial Measurement Unit (IMU)-Anbieter im Jahr 2025

Entdecken Sie die Top 10 der Glasfaser-IMU-Anbieter im Jahr 2025, darunter Honeywell, Exail, GuideNav und mehr. Vergleichen Sie Bias-Drift, Exportkontrolle und taktische Leistung für Luft- und Raumfahrt- und Verteidigungsanwendungen.