Theoretisch kann eine Trägheitsmesseinheit (IMU) Odometrie durchführen – sie misst die zurückgelegte Strecke eines Fahrzeugs durch Integration seiner Beschleunigung und Drehrate über die Zeit. In der Praxis ist diese reine Trägheits-Odometrie jedoch unpraktisch. Das Problem liegt in der Fehlerakkumulation : Schon winzige Sensorabweichungen verursachen eine Positionsdrift, die mit der Zeit exponentiell zunimmt. Innerhalb von Sekunden weicht die berechnete Flugbahn stark von der Realität ab.
Beim autonomen Fahren und in der Robotik, wo die Lokalisierungsgenauigkeit im Zentimeterbereich liegen muss, kann eine IMU allein einfach keine zuverlässige Odometrie liefern.
Eine IMU kann theoretisch die Odometrie durch doppelte Integration berechnen, aber Verzerrungen und Rauschen führen dazu, dass die Daten mit der Zeit exponentiell driften. Reale Navigationssysteme sind daher auf die Fusion der IMU mit GNSS, LiDAR oder Kameras angewiesen, um Präzision und Stabilität zu gewährleisten.
Trägheitsnavigation klingt einfach: Bewegung messen und Entfernung berechnen. Doch in der Praxis wachsen selbst kleine Sensorfehler schnell und beeinträchtigen die Genauigkeit. Eine IMU ist ein wichtiger Bestandteil jedes Navigationssystems, kann aber nicht allein funktionieren. Dieser Artikel erklärt, warum reine IMU-Odometrie versagt und wie Sensorfusion sie zu einem zuverlässigen Werkzeug für präzise Positionierung macht.

Inhaltsverzeichnis
Warum die IMU theoretisch Odometrie durchführen kann
Eine Trägheitsmesseinheit (IMU) misst die Beschleunigung und die Winkelgeschwindigkeit in drei Achsen .
Durch kontinuierliche Integration dieser Signale kann das System theoretisch berechnen:
- Orientierung (Haltung): durch Integration der Winkelgeschwindigkeit.
- Geschwindigkeit: durch Integration der linearen Beschleunigung.
- Position: durch erneute Integration der Geschwindigkeit.
Dies ist das Grundprinzip des Trägheitsnavigationssystems (INS) – einer eigenständigen Navigationsmethode, die ausschließlich auf Bewegungssensoren basiert. Im Idealfall mit perfekt kalibrierten Sensoren und ohne Rauschen könnte eine IMU die Bewegung eines Fahrzeugs kontinuierlich bestimmen und seine Flugbahn relativ zum Startpunkt schätzen. Daher kann eine IMU theoretisch Odometrie ohne externe Referenz durchführen.
Warum es in der Praxis scheitert: Das Problem der Fehlerakkumulation
Obwohl die Theorie Sinn macht, weist jede IMU inhärente Sensorfehler . Diese kleinen Abweichungen und Störungen verstärken sich während der doppelten Integration , die die Beschleunigung in die Position umwandelt, dramatisch. Mit der Zeit verursachen selbst kleinste Unregelmäßigkeiten eine große und schnell wachsende Drift.
Der Positionsfehler wächst quadratisch mit der Zeit
Wenn der Beschleunigungsmesser eine kleine konstante Abweichung b a (m/s²) aufweist, erhöhen sich die akkumulierten Geschwindigkeits- und Positionsfehler mit der Zeit wie folgt:
Dies bedeutet, dass der Positionsfehler proportional zum Quadrat der Zeit wächst . Selbst eine winzige Abweichung kann zu einer dramatischen Abweichung führen.
Nehmen wir beispielsweise an, dass die Beschleunigungsmesser-Vorspannung b 0,01 m/s 2 – ein sehr typischer Wert für handelsübliche MEMS-IMUs.
| Zeit | Positionsfehler |
|---|---|
| 1 Sekunde | 0,005 m |
| 10 s | 0,5 m |
| 30 Sekunden | 4,5 m |
| 60 Sekunden | 18 m |
Nach nur einer Minute (60 s) Betrieb kann der geschätzte Positionsfehler etwa 18 Meter , was weit über der für autonomes Fahren erforderlichen Lokalisierungsgenauigkeit ( normalerweise < 0,1–0,3 m ) liegt.
Gyroskop-Bias verursacht Lagedrift
Eine kleine Gyroskopabweichung mag unbedeutend erscheinen, führt aber mit der Zeit zu spürbaren Fehlern bei der Lageschätzung . Sobald die Ausrichtung abdriftet, kann die IMU die Schwerkraft nicht mehr richtig von der tatsächlichen Bewegung trennen – sie schafft es nicht, die Schwerkraft aus den Beschleunigungsmesserdaten zu „entfernen“. In diesem Fall wird ein Teil des Schwerkraftvektors horizontale Beschleunigung behandelt , sodass das System glaubt, das Fahrzeug bewege sich, obwohl es steht. Diese falsche Beschleunigung wird immer wieder in die falsche Geschwindigkeit und führt letztendlich zu einer explosionsartigen Positionsdrift .
Andere Fehlerquellen
Abgesehen von der Verzerrung sind IMUs in der realen Welt von mehreren Fehlerquellen betroffen, die sich mit der Zeit verstärken:
| Fehlerquelle | Auswirkungen |
|---|---|
| Skalierungsfaktorfehler | Falsche Skalierung von Beschleunigungs- oder Winkelgeschwindigkeitsmessungen. |
| Fehlausrichtung | Nicht orthogonale Sensorachsen führen zu Projektionsfehlern. |
| Temperaturdrift | Die Vorspannung verschiebt sich mit der Temperatur und verschlechtert die Kalibrierung. |
| Vibrationsgeräusche | Mechanisches Rauschen wird in die Positionsdrift integriert. |
| Anfänglicher Ausrichtungsfehler | Kleine Fehler bei der Starteinstellung verursachen langfristige Abweichungen. |
Selbst kleine Unvollkommenheiten führen in Kombination dazu, dass die Navigationsausgabe schnell divergiert. In der Praxis wird die reine Trägheitsodometrie selbst bei hochwertigen Sensoren innerhalb von Sekunden unbrauchbar.
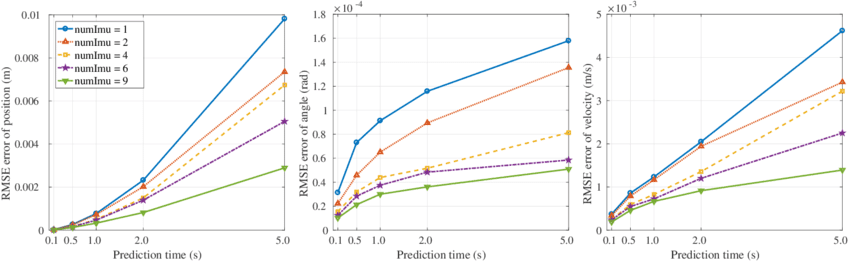
Präzisionsbewertung: Wie lange kann die IMU-Only-Odometrie halten?
Selbst mit fortschrittlichen Sensoren kann die reine Trägheits-Odometrie nur für kurze Zeit präzise bleiben, bevor sie außer Kontrolle gerät. Da der Positionsfehler quadratisch mit der Zeit zunimmt, hängt die Dauer des zuverlässigen Betriebs hauptsächlich von der Qualität der IMU und ihrer Bias-Stabilität ab.
| IMU-Klasse | Typische Voreingenommenheit | Positionsfehler (10 s) | Positionsfehler (60 s) | Praktische Anwendung |
|---|---|---|---|---|
| Verbraucherqualität | > 0,01 m/s² | > 0,5 m | > 18 m | Völlig unbrauchbar |
| Industriequalität | ~ 0,001 m/s² | ~ 5 cm | ~ 1,8 m | Nur für kurze Tests verwendbar |
| Navigationsklasse | < 0,0001 m/s² | ~ 0,5 cm | ~ 18 cm | Für einige Sekunden genau; Fusion noch erforderlich |
| Taktischer Grad | Extrem niedrig | Steuerbar | Wenige Meter | Verwendbar für Militär/Luftfahrt; hohe Kosten |
Selbst die hochwertigsten IMUs können eine Drift nicht dauerhaft vermeiden. Deshalb setzen moderne autonome Systeme stets auf Sensorfusion – die Kombination von IMU-Daten mit GNSS, LiDAR oder visuellen Eingaben –, um langfristige Genauigkeit und Stabilität zu gewährleisten.
Die Rolle der IMU in der modernen Navigation – Sensorfusion im Mittelpunkt
Obwohl eine IMU keine eigenständige Odometrie durchführen kann, spielt sie in der modernen Navigation eine unersetzliche Rolle . Anstatt die Hauptpositionierungsquelle zu sein, fungiert sie als Hochfrequenz-Rückgrat, das andere Sensoren verbessert und stabilisiert.
Hochfrequente Bewegungsschätzung
IMUs arbeiten mit Hunderten bis Tausenden von Hertz , viel schneller als GNSS, LiDAR oder Kameras.
Diese hohe Aktualisierungsrate ermöglicht es ihnen, schnelle Bewegungen zu erfassen und die Lücken zwischen langsameren Sensoren zu füllen – und so eine reibungslose, kontinuierliche Bewegungserkennung für das gesamte Navigationssystem zu gewährleisten.
Kurzfristige Vorhersage und Glättung
Wenn GNSS-Signale verloren gehen – in Tunneln, unter Brücken oder in dichten städtischen Gebieten – bietet die IMU eine kurzfristige Koppelnavigation , um eine kontinuierliche Flugbahn aufrechtzuerhalten.
Es prognostiziert den Systemzustand (Position, Geschwindigkeit, Ausrichtung) für einige Sekunden und gewährleistet so reibungslose Übergänge, bis wieder externe Messungen verfügbar sind.
Diese Überbrückungsfähigkeit macht die IMU für eine robuste Navigation in Umgebungen ohne GNSS .
Der Kern der Sensorfusion
In der modernen Lokalisierung fungiert die IMU als dynamischer Kern von Multisensor-Fusionssystemen. Ihre hochfrequenten Trägheitsdaten liefern kontinuierliche Bewegungsinformationen, während niedrigfrequente, aber driftfreie Messungen anderer Sensoren – wie GNSS, LiDAR oder Kameras – ständig akkumulierte Fehler korrigieren und so die Navigation stabil und präzise halten.
| Fusionsmethode | Sensorkombination | Anwendung |
|---|---|---|
| GNSS/IMU Lose oder enge Kopplung | RTK-GNSS + IMU | Hochpräzise Land- oder Luftnavigation |
| Visuell-Inertial-Odometrie (VIO) | Kamera + IMU | SLAM, UAVs, Robotik |
| LiDAR-Trägheits-Odometrie (LIO) | LiDAR + IMU | Autonomes Fahren, Kartierung |
| Faktorgraph oder Kalman-Filter-Fusion | Mehrere Sensoren + IMU | Integrierte Zustandsschätzung |
Abschluss
Theoretisch kann eine IMU allein Bewegungen abschätzen, in der Praxis wachsen ihre Fehler jedoch zu schnell, um nützlich zu sein. Selbst kleine Abweichungen können innerhalb von Sekunden zu einer Positionsdrift von mehreren Metern führen.
Dennoch bleibt die IMU unverzichtbar – sie liefert hochfrequente Bewegungsdaten, die andere Sensoren nicht liefern können. In Kombination mit GNSS, LiDAR oder Kameras wird sie zum Kern eines stabilen, präzisen Navigationssystems.
