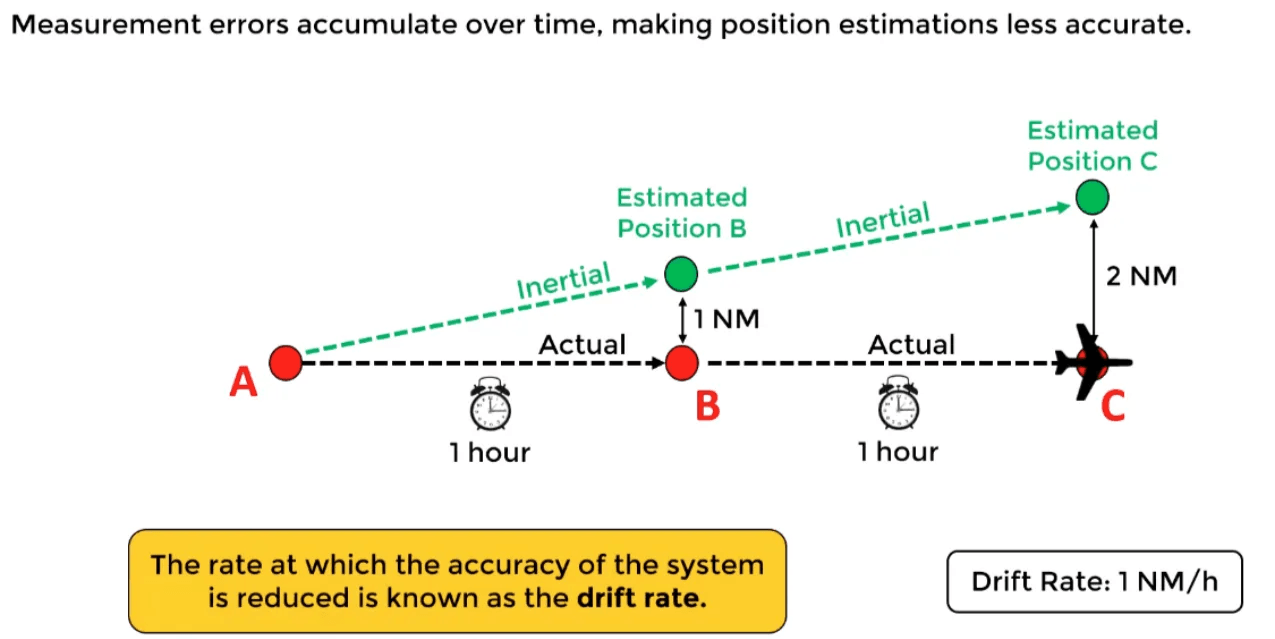
Im Zusammenhang mit Trägheitsnavigationssystemen (INS) bezieht Drift auf die allmähliche Anhäufung von Fehlern im Laufe der Zeit, die dazu führt, dass die Messungen des Systems (wie Position, Geschwindigkeit oder Kurs) allmählich ungenauer werden.
So funktioniert es:
- Keine externe Korrektur : In INS werden Sensoren wie Beschleunigungsmesser und Gyroskope verwendet, um Dinge wie Position und Richtung zu berechnen. Diese Sensoren sind jedoch nicht perfekt und ihre kleinen Fehler können sich im Laufe der Zeit aufbauen.
- Kleine Fehler addieren : Selbst ein winziger Fehler in der Messung (wie eine winzige Verschiebung der Position oder ein geringfügiger Fehler in der Rotation) kann im Laufe der Zeit größer werden, wodurch das System vom wahren Wert vom wahren Wert „abnimmt“.
Warum es wichtig ist:
Drift ist eine häufige Herausforderung bei INS, da sie zu steigenden Fehlern führt, wenn das System weiter funktioniert. Ohne Korrekturen aus externen Quellen (wie GPS) kann Drift dazu führen, dass das System nach einiger Zeit ungenaue Ergebnisse liefert, was die Gesamtgenauigkeit des Navigationssystems beeinflusst.