Hochpräzise MEMS-IMUs liefern nach der Integration oft nicht die erwartete Leistung. Drift, Fehlausrichtung und Umwelteinflüsse beeinträchtigen die Genauigkeit schleichend – bis es im Feld zu Ausfällen kommt. Um die wahre Präzision zu bewahren, befolgen Sie vier Regeln: strenge Ausrichtung, kontrollierte Umgebung, regelmäßige Kalibrierung und disziplinierter Betrieb.
Hochpräzise MEMS-IMUs bieten unübertroffene Bewegungserkennungsleistung – allerdings nur bei korrekter Anwendung. Dieser Artikel zeigt vier kritische Anwendungsfehler auf, die häufig zu Genauigkeitsverlusten führen, und zeigt, wie diese bei der Integration in die Praxis vermieden werden können.
Hochpräzise MEMS-IMUs bilden das Rückgrat moderner Navigationssysteme – von Drohnen bis hin zu autonomen Fahrzeugen. Doch selbst Premium-Sensoren versagen bei unsachgemäßer Handhabung. Dieser Leitfaden deckt die versteckten Fallstricke auf, die die Genauigkeit beeinträchtigen, und zeigt, wie Integratoren sie verhindern können.
Inhaltsverzeichnis
Installation: Der Ausgangspunkt jeder hochpräzisen MEMS-IMU
Montieren Sie es fest – nicht sanft
Eine MEMS-IMU erfasst nur ihre eigene Bewegung und muss sich daher exakt mit der Plattform bewegen. Für zuverlässige Ergebnisse befestigen Sie die Einheit mit Metall- oder Kohlefaserhalterungen direkt an einer starren Struktur. Vermeiden Sie Gummipolster oder andere weiche Materialien, die sich biegen oder Vibrationen absorbieren – sie unterbrechen die mechanische Verbindung und verfälschen die Sensordaten.
Wenn eine Schwingungsisolierung unvermeidbar ist, gehen Sie bei der Konstruktion sorgfältig vor und stellen Sie sicher, dass die Dämpfungseigenschaften die Ausgangsfrequenz oder den Phasengang der IMU nicht verzerren.
Richten Sie die Achsen perfekt aus
Schon ein kleiner Winkelversatz kann zu erheblichen Positionsfehlern führen. Wenn eine hochpräzise MEMS-IMU nur um ein Grad falsch ausgerichtet ist, kann die resultierende Abweichung nach längerem Betrieb mehrere Kilometer betragen. Richten Sie die Achsen der IMU immer am Referenzrahmen des Fahrzeugs aus oder führen Sie nach der Installation eine präzise Ausrichtungskalibrierung durch.
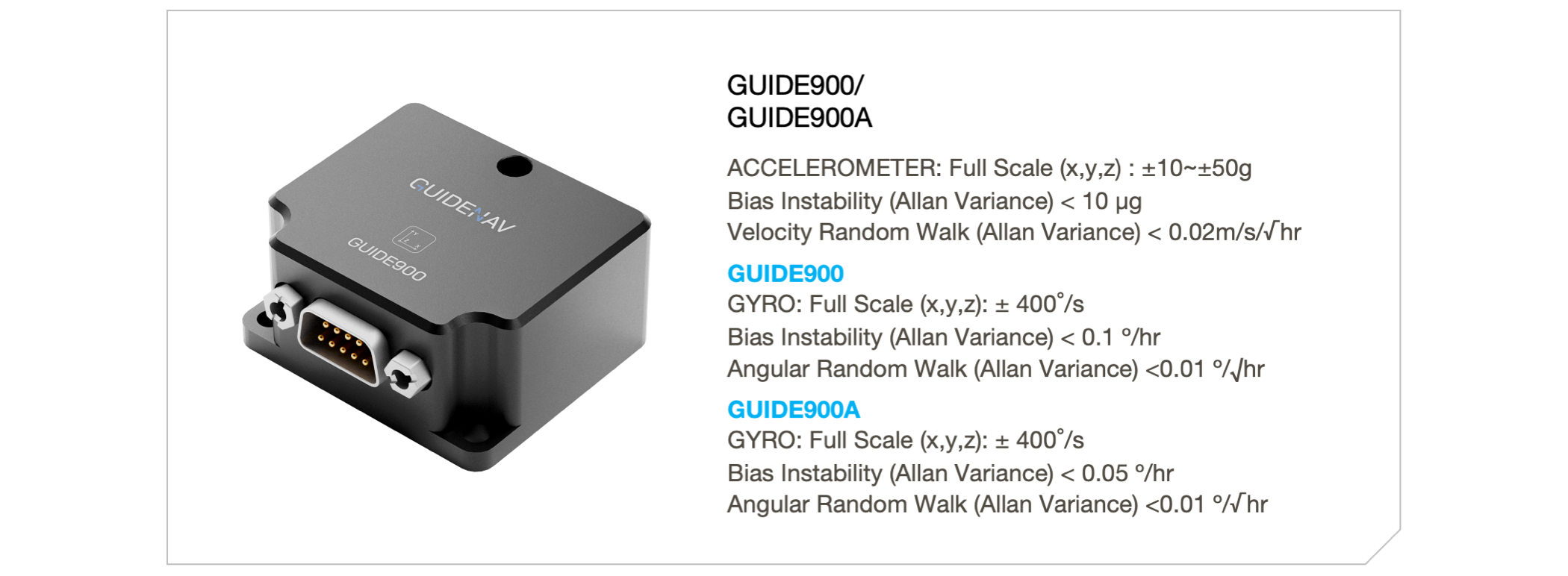
Der GuideNav MEMS IMU GUIDE900 ist werkseitig mit einer Skalierungsfaktor-Nichtlinearität von weniger als 100 ppm und einer achsenübergreifenden Kopplung von unter 200 ppm kalibriert – eine schlechte Installationsausrichtung kann diese Präzision jedoch schnell zunichtemachen.
Vermeiden Sie Vibrations- und Stresszonen
Ständige Vibrationen oder strukturelle Belastungen verändern die internen Eigenschaften einer MEMS-IMU allmählich. Vermeiden Sie die Montage des Sensors in der Nähe von Motoren, Getrieben oder Schweißverbindungen. Mit der Zeit können diese mechanischen Einflüsse zu einer Bias-Drift führen und die Langzeitstabilität beeinträchtigen.
Umweltkontrolle: Der verborgene Feind der IMU-Genauigkeit
Temperaturstabilität ist alles
Die Temperatur ist die häufigste Ursache für Drift in einer hochpräzisen MEMS-IMU. Jeder Sensor hat einen definierten thermischen Betriebsbereich – typischerweise von −40 °C bis +85 °C. Plötzliche Schwankungen können den Nullpunktfehler oder den Skalierungsfaktor verschieben.
Bewahren Sie die MEMS-IMU in einer stabilen Umgebung auf, indem Sie sie bei Bedarf isolieren, den Luftstrom kontrollieren oder Heizelemente verwenden. Alle GuideNav MEMS-IMUs sind über den gesamten Bereich vollständig temperaturkompensiert und gewährleisten so eine gleichbleibende Genauigkeit auch unter extremen Bedingungen.
Feuchtigkeit kann die Präzision unbemerkt beeinträchtigen
Feuchtigkeit ist eine weitere unsichtbare Bedrohung. Übersteigt die relative Luftfeuchtigkeit 85 %, kann sie in das Gehäuse eindringen, Schaltkreise korrodieren und das Sensorverhalten verändern. Selbst kurzzeitige Kondensation kann vorübergehende Bias-Sprünge auslösen. Schützen Sie die hochpräzise IMU in einem versiegelten Gehäuse stets mit Trockenmittel, wenn Sie sie in Meeres- oder tropischen Klimazonen betreiben.
Vermeiden Sie elektromagnetische Störungen (EMI)
Hochstromleitungen und Schaltnetzteile können Störungen in das analoge Frontend einer MEMS-IMU einspeisen. Um Störungen zu vermeiden, trennen Sie Strom- und Signalleitungen, sorgen Sie für eine ordnungsgemäße Erdung und verwenden Sie abgeschirmte Kabel. Eine saubere elektromagnetische Umgebung ist für die langfristige Präzision ebenso wichtig wie mechanische Stabilität.
Kalibrierung: Die Lebensader einer hochpräzisen MEMS-IMU
Die Werkskalibrierung hält nicht ewig
Jede MEMS-IMU verlässt das Werk kalibriert auf Bias, Skalierungsfaktor und Orthogonalität. Diese Parameter verändern sich jedoch mit der Zeit aufgrund von Temperaturschwankungen, Vibrationen und mechanischer Belastung. Um die Leistung einer hochpräzisen IMU gemäß den Spezifikationen zu gewährleisten, sollten Sie alle 6–12 Monate eine regelmäßige Neukalibrierung durchführen lassen, bei unternehmenskritischen Systemen auch früher.
Wählen Sie den richtigen Kalibrierungsansatz
Wenn das Entfernen der IMU nicht praktikabel ist, führen Sie eine On-Board- oder Echtzeitkalibrierung mithilfe statischer Ausrichtungsroutinen oder einer GNSS-gestützten Schätzung durch.
Um die Präzision vollständig wiederherzustellen, ist jedoch eine Laborkalibrierung auf einem Drehtisch oder in einer Wärmekammer erforderlich. Diese Methode korrigiert alle sechs Achsen und kompensiert temperaturabhängige Driften. So wird sichergestellt, dass die MEMS-IMU in allen Umgebungen eine taktische Leistung liefert.
Überprüfen Sie immer das Ergebnis
Die Kalibrierung ist erst nach der Überprüfung abgeschlossen. Vergleichen Sie die Daten nach der Kalibrierung mit Referenzbewegungsprofilen oder Ground-Truth-Sensoren, um Stabilität und Genauigkeit zu bestätigen.
Durch die Vernachlässigung der Überprüfung können versteckte Fehler entstehen, die die Leistung unbemerkt beeinträchtigen, wodurch der Zweck der Neukalibrierung zunichte gemacht wird.
Bedienung & Handhabung: Präzision steckt im Detail
Machen Sie sich warm, bevor Sie den Daten vertrauen
Eine MEMS-IMU benötigt nach dem Einschalten Zeit, um thermische und elektronische Stabilität zu erreichen. Die meisten hochpräzisen IMUs benötigen je nach Modell und Umgebung eine Aufwärmphase von 1–30 Minuten. Eine zu frühe Datenerfassung kann zu einer vorübergehenden Abweichung führen, die um ein Vielfaches über dem Nennwert liegt.
Vermeiden Sie häufiges Aus- und Wiedereinschalten
Durch wiederholtes Ein- und Ausschalten der IMU werden die internen Filter zurückgesetzt und es kommt zu vorübergehenden Bias-Änderungen. Sorgen Sie dafür, dass die MEMS-IMU während der Erfassung kritischer Daten kontinuierlich mit Strom versorgt wird, um eine gleichbleibende Leistung und nahtlose Datenkontinuität zu gewährleisten.
Immer mit Vorsicht handhaben
Trotz ihrer robusten Bauweise enthalten hochpräzise MEMS-IMUs empfindliche Mikrostrukturen. Stürze, Stöße oder unsachgemäße Handhabung können zu einer geringfügigen, aber dauerhaften Verschlechterung der Genauigkeit führen. Verwenden Sie beim Transport gepolsterte Behälter und sichere Anschlüsse. Überprüfen Sie regelmäßig Kabel, Halterungen und Gehäuse – mechanische Belastungen oder lose Kabel führen häufig zu einer Sensordrift.

GuideNav-Experteneinblick
Bei GuideNav haben wir gesehen, wie ein einfaches Versehen – schlechte Montage, fehlende Kalibrierung oder thermische Drift – eine hochpräzise MEMS-IMU in einen unzuverlässigen Sensor verwandeln kann. Bei der Integration in der realen Welt geht es nicht nur um Spezifikationen; es geht um Disziplin bei Installation, Kalibrierung und langfristiger Wartung.
Aus diesem Grund wurden die GuideNav MEMS IMUs für professionelle Integratoren entwickelt, die eine gleichbleibende, praxiserprobte Genauigkeit verlangen. Jede Einheit ist vollständig temperaturkompensiert, orthogonal kalibriert und durch ein robustes Aluminiumgehäuse geschützt, das selbst härtesten Vibrationen und Umweltbedingungen standhält.
Unabhängig davon, ob Ihr Projekt UAVs, autonome Fahrzeuge oder Industrieroboter umfasst, sorgt die Anwendung der richtigen Vorgehensweisen dafür, dass Ihre MEMS-IMU genau wie vorgesehen funktioniert – stabil, zuverlässig und bereit für unternehmenskritische Arbeiten.
