In Teil 1 haben wir erklärt, was ARW ist und warum es die Zuverlässigkeit jedes IMU-basierten Systems bestimmt. Wissen über die Funktionsweise von ARW ist jedoch nur dann wertvoll, wenn man es bei der Entwicklung berücksichtigen kann. Dieser zweite Teil konzentriert sich auf die praktische Seite: Wie beeinflusst ARW die tatsächliche UAV-Navigation, was Software leisten kann und was nicht und wie bewerte ich Sensoren, wenn ein Ausfall keine Option ist?
Der Angle Random Walk (ARW) stellt die ultimative Grenze der IMU-Genauigkeit dar . Er kann nicht durch Software beseitigt, sondern nur durch die Auswahl rauscharmer Sensoren, ein stabiles thermisches Design, Schwingungsisolierung und effektive Strategien zur Multisensorfusion reduziert werden.
Aus diesem Grund werde ich Ihnen in diesem Teil erläutern, wie sich ARW in realen UAV-Operationen zeigt, warum Software allein es nicht verhindern kann und welche praktischen Designentscheidungen – Sensorauswahl, Wärmemanagement, mechanische Isolierung und Fusion – den Unterschied zwischen Missionserfolg und -misserfolg ausmachen können.
Inhaltsverzeichnis
Wie wirkt sich ARW auf die UAV-Navigation aus?
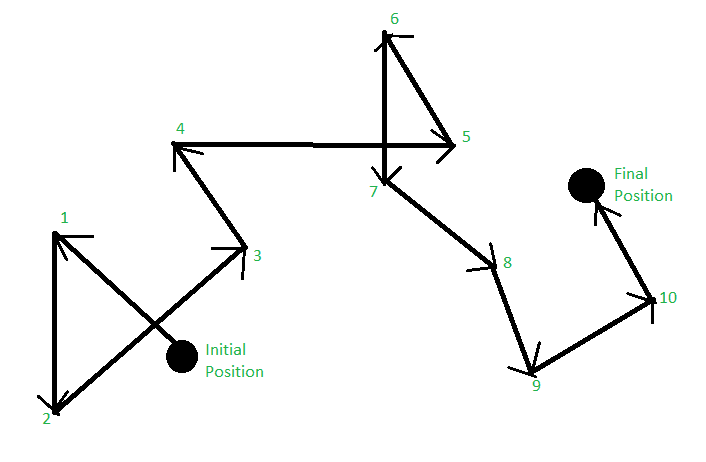
Stellen Sie sich vor: Sie fliegen mit einem Starrflügel-UAV durch eine Schlucht ohne GNSS-Signal. Der Autopilot verlässt sich vollständig auf Ihre IMU, um die Fluglage zu halten und die Flugroute stabil zu halten. In den ersten Minuten sieht alles stabil aus. Doch dann beginnt die Orientierung zu driften – zunächst langsam, dann schneller. Das UAV gerät ins Schleudern, die Flughöhe gerät ins Wanken, und Sie haben Ihre Referenz verloren. Was ist passiert?
Das ist ARW in Aktion. Selbst ohne Bewegung, ohne Temperaturgradienten und ohne Vibrationen beeinträchtigt das integrierte Winkelrauschen Ihr Vertrauen in Nick-, Roll- und Kursverhalten . Sobald die ARW-induzierte Drift Ihre Flugsteuerungsschwellen überschreitet, kann keine PID-Abstimmung oder Glättung die Plattform mehr retten.
In meinen eigenen UAV-Designs betrachte ich ARW als Navigationszeitbudget . Ein MEMS-Gyroskop mit 0,2°/√h bietet Ihnen möglicherweise 10–15 Minuten nutzbare Stabilität in einer GNSS-freien Zone. Ein taktisches MEMS mit 0,05°/√h erweitert dieses Zeitfenster. FOG verschafft Ihnen Stunden. Der Unterschied liegt nicht nur in der Leistung, sondern darin, ob die Mission überhaupt durchgeführt werden kann .
Kann ARW in Software kompensiert werden?
Diese Falle sehe ich viel zu oft: Ein Team stößt auf eine Orientierungsdrift und geht davon aus, dass diese in der Firmware behoben werden kann. Sie fügen weitere Filter hinzu, optimieren die Kalman-Verstärkung oder stapeln Sensorfusionsschichten – doch die Drift verschwindet nicht . Denn es geht nicht um einen Programmierfehler oder eine Fehlkonfiguration der Fusion – es ist physikalische Natur.
ARW ist weder ein Bias noch ein Offset – es ist nicht reduzierbares Rauschen. Es pendelt sich nicht mit der Zeit ein und gleicht sich nicht aus wie eine langsame thermische Drift. Es sitzt am unteren Ende jedes Gyro-Ausgangs und führt von der ersten Sekunde an Unsicherheit in Ihre Integration ein.
Ja, Fusion hilft. GNSS-Updates können die Kursdrift zurücksetzen. Vision-Systeme oder LiDAR können die Pose verankern. Wenn diese jedoch ausfallen – beispielsweise in einem Tunnel oder bei Störungen – greift Ihr System auf die reine IMU zurück , und in diesem Moment wird ARW zur Countdown-Uhr. Wenn das Eigenrauschen des Sensors zu hoch ist, hilft Ihnen kein Software-Trick.
Ich sage den Teams: Sie können die Auswirkungen von ARW filtern, aber nicht löschen. Wenn Ihre Plattform länger als ein paar Minuten ohne externe Korrektur fliegen, zielen oder stabilisieren muss, sollten Sie Ihren Kreisel entsprechend auswählen – oder ihn so konstruieren, dass er nicht mehr funktioniert.
Wie minimieren Ingenieure ARW im Systemdesign?
ARW lässt sich nicht eliminieren, aber man kann es intelligent umgehen . Jedes System, das ich mit zuverlässiger Trägheitsleistung geliefert habe, begann mit der Frage: „Wie niedrig muss mein ARW sein und wie erreiche ich das am besten?“ So gehe ich das an:
- Die Sensorauswahl steht an erster Stelle. Bei einem knappen ARW-Budget kann kein Algorithmus einen billigen MEMS-Gyroskop retten. Beginnen Sie mit dem Gerät mit dem niedrigsten ARW-Wert, das zu Ihrem Volumen, Ihrer Leistung und Ihrem Budget passt. Meiner Erfahrung nach bestimmt diese Entscheidung allein 80 % der Qualität des nachgelagerten Systems.
- Thermische Stabilität ist wichtiger als gedacht. Selbst ein gut ausgestatteter Kreisel kann mit zunehmender Temperatur unter steigendem Geräuschpegel leiden. Ich habe schon beobachtet, dass sich die ARW-Werte bei schlechter thermischer Isolierung verdoppeln. Eine stabile thermische Masse oder eine leichte aktive Steuerung machen einen echten Unterschied.
- Mechanische Isolierung reduziert das effektive Rauschen. Vibrationen führen Breitbandenergie in den Signalpfad des Sensors ein, die teilweise als Winkelbewegung interpretiert wird. Weiche Halterungen oder abgestimmte Isolatoren senken zwar nicht das Rauschen selbst, aber das, was das System wahrnimmt .
- Sensorfusion erweitert Ihren Zeithorizont. GNSS, Magnetometer, Barometer, visuelle Odometrie – sie alle helfen, aber nur, wenn ihre eigene Unsicherheit gut beherrscht wird. Ich betrachte Fusion nicht als Patch für schlechte IMUs, sondern als Multiplikator für gute.
Die wichtigste Erkenntnis? ARW definiert die Untergrenze. Alles andere baut darauf auf. Wenn Ihr Sensor im Kern verrauscht ist, erbt jede darüber liegende Schicht – Filter, Schätzer, Fusion – diese Unsicherheit.
Worauf sollten Sie bei einer ARW-sensitiven Anwendung achten?
Bei der Auswahl einer IMU für eine unternehmenskritische Plattform entscheiden Sie sich nicht nur für eine Spezifikation, sondern auch für einen Ausfallzeitrahmen. Der ARW gibt an, wie lange Ihr System ohne externe Korrektur fliegen, steuern, zielen oder stabilisieren kann, bevor Unsicherheiten auftreten. Deshalb betrachte ich den ARW als entscheidende Variable bei der IMU-Auswahl.
So formuliere ich es:
- Wenn Ihr GNSS-Ausfallfenster weniger als 5 Minuten beträgt und Sie nur eine grobe Orientierung benötigen, könnten industrielle MEMS (0,1–0,5°/√h) funktionieren. Rechnen Sie jedoch damit, dass Ihr Filter die ganze Zeit über gegen die Drift kämpft.
- Wenn Ihre Plattform 10–20 Minuten lang stabil bleiben muss , wie bei ISR-UAVs oder fahrzeugmontierten Optiken, sind taktische MEMS mit ARW im Bereich von 0,05°/√h Ihr Mindesteinstiegspunkt. Ich verwende hier nie Sensoren in Verbraucherqualität – keine Ausnahmen.
- Wenn Sie stundenlanges Vertrauen benötigen – in der Schiffsnavigation, im Schienenverkehr oder bei Luftwaffen – ist FOG keine Option mehr. Sie benötigen ARW unter 0,01°/√h und, was noch wichtiger ist, die Konsistenz und Umweltverträglichkeit der FOG-Architektur.
Bei jeder Designüberprüfung frage ich: „Was passiert, wenn die externen Referenzen abfallen?“ Wenn die Antwort lautet: „Wir verschlechtern uns langsam und vorhersehbar“, dann erfüllt ARW seinen Zweck. Wenn die Antwort lautet: „Wir sind in weniger als drei Minuten verloren“, dann haben Sie die falsche IMU gewählt.
ARW als Maßstab für die Wahl der richtigen IMU
Der Angle Random Walk ist nicht nur eine Zahl, die im Datenblatt versteckt ist – er ist der Maßstab, der bestimmt, ob eine IMU in unternehmenskritischen Anwendungen vertrauenswürdig ist. Ingenieure in den Bereichen Verteidigung, Luft- und Raumfahrt sowie Schifffahrt wissen, dass ein niedriger ARW den Unterschied zwischen Systemen ausmacht, die innerhalb von Minuten driften, und Systemen, die über Stunden oder sogar Tage stabil bleiben.
Bei GuideNav konzentrieren wir uns auf genau diesen Maßstab. Unsere IMUs und FOG-basierten Navigationssysteme sind mit branchenführender ARW-Leistung ausgestattet und gewährleisten Genauigkeit in GNSS-freien Umgebungen, langlebigen UAVs und präzisen Stabilisierungsplattformen. Ob Sie die kompakte Effizienz taktischer MEMS oder die felsenfeste Stabilität navigationstauglicher FOG-Systeme benötigen – GuideNav bietet maßgeschneiderte Lösungen für den Missionserfolg.
