Bei meiner Arbeit in der Entwicklung von Navigationssystemen habe ich festgestellt, dass wahre Zuverlässigkeit auf Unabhängigkeit beruht – nicht auf der Abhängigkeit von externen Signalen. Deshalb spielen Trägheitsnavigationssysteme (INS) eine so entscheidende Rolle: Sie arbeiten ausschließlich mit internen Messungen und ermöglichen so eine konsistente und kontinuierliche Navigation in unterschiedlichsten Umgebungen, von autonomen Fahrzeugen bis hin zu Luft- und Raumfahrtplattformen.
Ein Trägheitsnavigationssystem (INS) ermittelt Position, Geschwindigkeit und Orientierung ausschließlich mithilfe interner Bewegungssensoren und ermöglicht so eine präzise Navigation in einer Vielzahl von Anwendungen – darunter autonome Systeme, Unterwasserplattformen und missionskritische Verteidigungsoperationen.
Bevor Sie sich für ein INS für Ihre Anwendung entscheiden, ist es hilfreich, ein klares Verständnis seiner Funktionsprinzipien und Systemtypen zu entwickeln.
Inhaltsverzeichnis

Was ist ein Trägheitsnavigationssystem (INS)?
Ein Trägheitsnavigationssystem (INS) ist ein autarkes System, das interne Bewegungssensoren – typischerweise Beschleunigungsmesser und Gyroskope – nutzt, um Position, Geschwindigkeit und Orientierung einer Plattform im dreidimensionalen Raum kontinuierlich zu berechnen. Da es keine externen Referenzen benötigt, ist ein INS besonders wertvoll in Umgebungen, die eine konsistente und unterbrechungsfreie Navigation erfordern, beispielsweise unter Wasser, unter Tage und in hochdynamischen Verteidigungsanwendungen.
Was sind die Kernkomponenten eines INS?
Meine Erfahrung in der Entwicklung von INS-Lösungen zeigt, dass jedes System auf drei wesentlichen Komponenten basiert: Gyroskopen, Beschleunigungsmessern und einem Navigationsprozessor. Zur Verbesserung von Genauigkeit und Stabilität integrieren wir häufig zusätzliche Sensoren – wie GNSS-Empfänger, Magnetometer oder barometrische Höhenmesser – für eine fortschrittliche Sensorfusion. Diese Architektur ermöglicht dem INS eine zuverlässige Bewegungserfassung in unterschiedlichsten und anspruchsvollen Umgebungen.

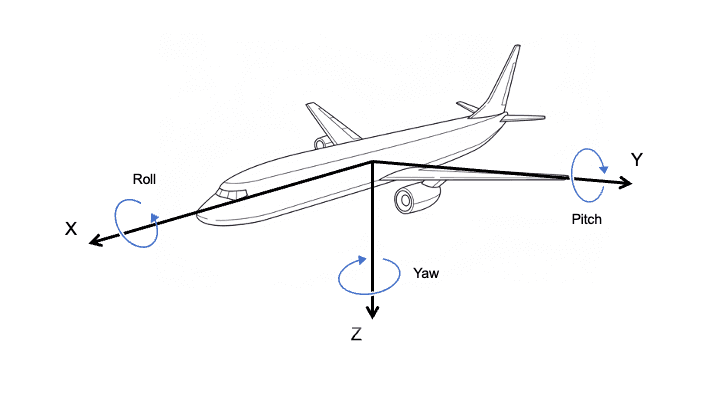
Gyroskope
Gyroskope messen die Winkelgeschwindigkeit entlang dreier orthogonaler Achsen (X, Y, Z) und liefern damit wichtige Daten zur Berechnung der Orientierung – Rollen, Nicken und Gieren. MEMS-Gyroskope werden häufig für kompakte Anwendungen eingesetzt, während FOG (Faseroptik-Gyroskope) und RLG (Ringlasergyroskope) höhere Präzision und Langzeitstabilität für taktische Systeme und Systeme der Luft- und Raumfahrt bieten.
Beschleunigungsmesser
Beschleunigungsmesser messen die lineare Beschleunigung entlang jeder Achse. Die Integration dieser Werte über die Zeit ergibt die Änderung von Geschwindigkeit und Weg. Hochleistungs-Beschleunigungsmesser mit geringer Bias-Instabilität und niedrigem Rauschen sind entscheidend für die Aufrechterhaltung der Positionsgenauigkeit über die Zeit.
Trägheitsnavigationsprozessor
Der Prozessor bildet das Rechenzentrum des INS. Er verarbeitet die Eingangsdaten von Bewegungssensoren, wendet Kompensationsalgorithmen und Filter an und gibt Position, Geschwindigkeit und Orientierung in Echtzeit aus. Viele Systeme unterstützen zudem die Integration externer Sensoren und Echtzeitdiagnose innerhalb dieser Einheit.
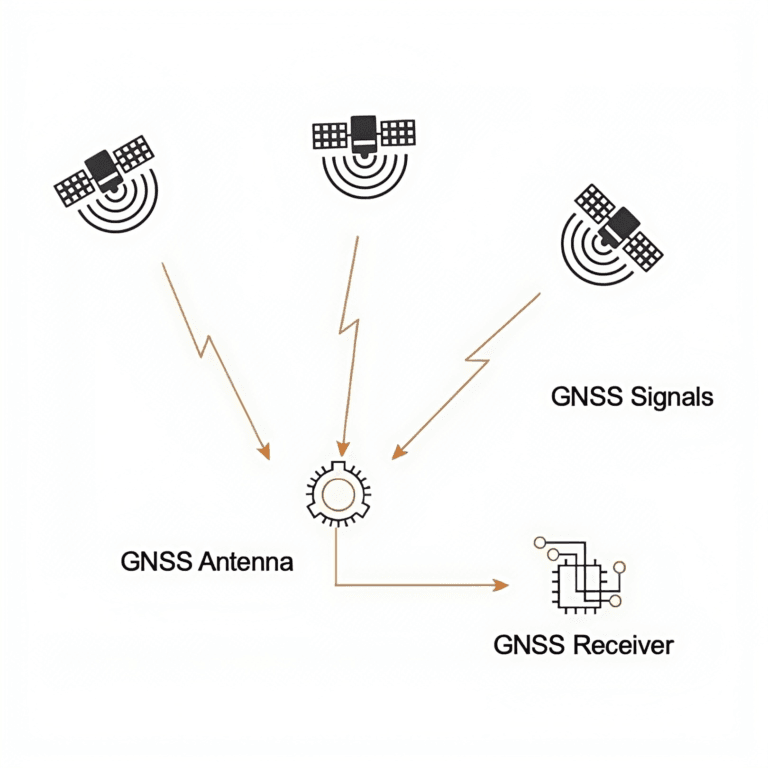
GNSS-Empfänger
Immer mehr INS-Lösungen integrieren GNSS-Empfänger, um die Langzeitgenauigkeit und die globale Positionsbestimmung zu verbessern. Durch die Kombination von Trägheitsmessungen mit Satellitendaten – typischerweise mittels erweiterter Kalman-Filterung – korrigieren diese Hybridsysteme effektiv die Drift und gewährleisten eine robuste Navigationsleistung für autonome Plattformen, Luft- und Raumfahrtsysteme sowie geodätische Anwendungen.
Magnetometer
Magnetometer helfen bei der Bestimmung der Flugrichtung durch Messung des Erdmagnetfelds. Obwohl sie weniger genau als gyroskopische Lösungen sind, liefern sie einen nützlichen absoluten Referenzwert – insbesondere bei Anwendungen mit geringer Dynamik oder in Innenräumen.
Barometrische Höhenmesser
Diese Sensoren liefern Höhenmesswerte auf Basis des Luftdrucks. Sie werden häufig in UAVs, Flugzeugen und Bodensystemen eingesetzt, die vertikale Referenzdaten in Umgebungen benötigen, in denen die GNSS-Höhenmessung unzuverlässig sein kann.
Zusammen bilden diese Komponenten ein vielseitiges Navigationssystem, das in der Lage ist, Bewegungsdaten in Echtzeit mit hoher Rate zu liefern – egal ob es als reines Trägheitsnavigationssystem oder als Teil einer eng integrierten GNSS/INS-Lösung für komplexe, dynamische Umgebungen arbeitet.
Welche verschiedenen Arten von INS gibt es: MEMS, FOG und RLG?
Inertialnavigationssysteme lassen sich grob anhand der Gyroskoptechnologie . Die Wahl der Technologie bestimmt wichtige Leistungsmerkmale wie Bias-Stabilität, Rauschen, Drift und Kosten – daher ist es entscheidend, den richtigen Typ für Ihre Anwendung auszuwählen.
1. MEMS INS (Mikroelektromechanische Systeme)
MEMS-INS basieren auf mikromechanischen Gyroskopen und Beschleunigungsmessern aus Silizium. Dank Fortschritten in der Halbleiterfertigung finden diese Systeme heute breite Anwendung in kompakten Plattformen, bei denen Größe, Gewicht, Leistungsaufnahme und Kosten (SWaP-C) entscheidende Einschränkungen darstellen.



2. FOG INS (Fiber Optic Gyroscope-based INS)
FOG INS nutzt den Sagnac-Effekt und verwendet spiralförmige Glasfasern zur Rotationsmessung. Es bietet eine deutlich höhere Stabilität, geringere Drift und eine bessere Linearität des Skalierungsfaktors als MEMS-Systeme und ist daher ideal für taktische Navigationsanwendungen geeignet.


3. RLG INS (Ringlasergyroskop-basiertes INS)
RLG INS nutzt Laserinterferenz in einem geschlossenen Resonator, um Winkelgeschwindigkeiten mit extrem hoher Präzision zu erfassen. Diese Architektur bietet Genauigkeit auf strategischem Niveau und wird typischerweise in Systemen eingesetzt, in denen absolute Trägheitsgenauigkeit von entscheidender Bedeutung ist.
| INS-Typ | Vorteile | Einschränkungen | Typische Anwendungsfälle |
|---|---|---|---|
| MEMS-Eingänge |
|
| Unbemannte Luftfahrzeuge, Robotik, tragbare Systeme, Loitering Munitions |
| NEBELINS |
|
| Luft- und Raumfahrtplattformen, Verteidigungsfahrzeuge, Marinesysteme |
| RLG INS |
|
| Ballistische Raketen, Raumfahrzeuge, High-End-Flugzeuge |
Wie funktioniert INS?
Bei der Konfiguration eines INS definiere ich zunächst immer dessen Anfangsposition, -geschwindigkeit und -orientierung. Anschließend nutzt das System ausschließlich Trägheitsmessungen, um jeden nachfolgenden Bewegungszustand in Echtzeit zu bestimmen.
1. Beschleunigungsmessung
Das System nutzt dreiachsige Beschleunigungsmesser zur Messung der linearen Beschleunigung in drei Richtungen. Diese Werte werden über die Zeit integriert, um die Geschwindigkeit zu berechnen, und anschließend erneut integriert, um die Positionsänderungen zu ermitteln.
2. Winkelgeschwindigkeitsmessung
Gyroskope messen die Winkelgeschwindigkeit entlang der X-, Y- und Z-Achse. Diese Messwerte werden verwendet, um die Orientierung des Systems durch Quaternionen- oder Euler-Winkelintegration zu aktualisieren.
3. Koppelnavigationsprinzip
INS arbeitet mit Koppelnavigation, das heißt, es schätzt den aktuellen Zustand anhand des vorherigen und der Sensordaten. Dadurch kann es ohne externe Referenzen wie GNSS navigieren.
4. Fehlerakkumulation und Drift
Da es verrauschte Sensordaten integriert, akkumulieren sich mit der Zeit kleine Abweichungen und Fehler (z. B. Bias-Instabilität, Skalierungsfaktorfehler), was zu einer Drift sowohl der Position als auch der Orientierung führt.
5. Sensorfusion und unterstützende Eingangssignale
Um die Drift zu minimieren, wird INS häufig mit externen Sensoren wie GNSS, Doppler-Logs (DVL), Barometern oder Magnetometern kombiniert. Diese zusätzlichen Sensoren korrigieren akkumulierte Fehler und erhöhen die operative Genauigkeit.
Diese Architektur ermöglicht es dem INS, eine autonome Navigation in Echtzeit in Umgebungen zu gewährleisten, in denen externe Signale eingeschränkt, gestört oder gar nicht verfügbar sind – beispielsweise bei hoher Dynamik oder elektromagnetischen Störungen.
Welche Leistungskennzahlen definieren die Qualität eines INS?
Bei der Auswahl eines Trägheitsnavigationssystems ist das Verständnis seiner wichtigsten Leistungsparameter unerlässlich, um sicherzustellen, dass es die Missionsanforderungen erfüllt. Die folgenden Kennzahlen sind dabei von größter Bedeutung:
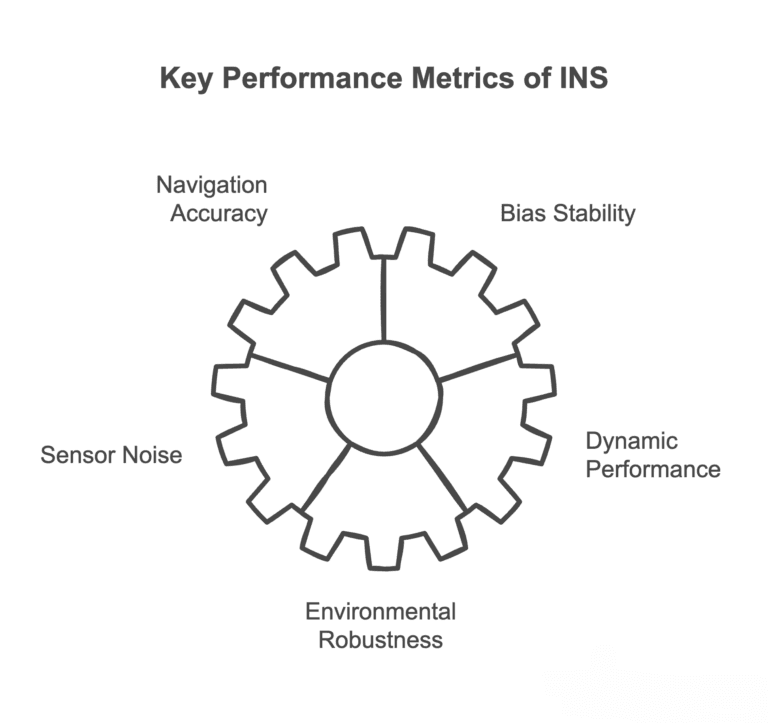
1. Navigationsgenauigkeit
Die Genauigkeit von INS umfasst Positions-, Geschwindigkeits- und Lagefehler, die sich mit der Zeit akkumulieren. Hohe Präzision ist für den Betrieb in GNSS-freien Umgebungen unerlässlich. Das Guidenav GFS120A bietet beispielsweise eine Kursgenauigkeit von 0,01° (1σ) , eine Roll-/Nickgenauigkeit von 0,005° (1σ) und eine RTK-Positionierung von <2 cm + 1 ppm bei einem Geschwindigkeitsfehler von nur 0,02 m/s .
2. Bias-Stabilität
Die Bias-Stabilität spiegelt die Langzeitdrift von Gyroskopen und Beschleunigungsmessern wider und beeinflusst direkt die Navigationsdauer. Der Guidenav GFS120A zeichnet sich durch eine Gyroskop-Bias-Stabilität von 0,003°/h und eine Beschleunigungsmesser-Bias-Stabilität unter 20 μg und eignet sich daher für hochpräzise und langzeitige autonome Anwendungen.
3. Sensorrauschen (Zufallslauf)
Random Walk quantifiziert kurzfristiges Sensorrauschen. Niedrigere ARW- und VRW-Werte deuten auf sauberere und stabilere Daten während der Bewegung hin.
4. Dynamisches Verhalten
Aktualisierungsrate, Latenz und Bandbreite bestimmen, wie schnell das INS auf Bewegungen reagiert. Eine hohe dynamische Leistungsfähigkeit ist für UAVs, Roboter und Raketen von entscheidender Bedeutung.
5. Umweltrobustheit
INS muss Vibrationen, Stößen und extremen Temperaturen standhalten. Die Einhaltung der MIL-STD- oder DO-160-Standards gewährleistet Zuverlässigkeit unter rauen Bedingungen.
Das Verständnis und der Vergleich dieser Kennzahlen ermöglichen es Integratoren, das für ihre Plattform geeignete INS auszuwählen und dabei Kosten, Präzision und Umgebungsanforderungen in Einklang zu bringen.
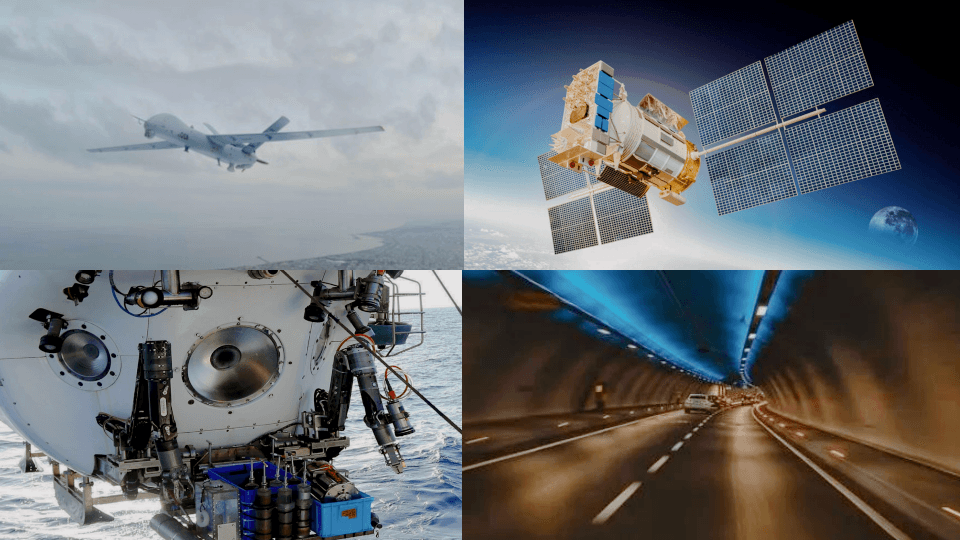
Was sind die typischen Anwendungsbereiche von INS in verschiedenen Branchen?
Inertialnavigationssysteme (INS) finden breite Anwendung in der Luft- und Raumfahrt, der Schifffahrt, der Verteidigung, bei unbemannten Systemen, der industriellen Automatisierung und im Untertagebau, wo eine kontinuierliche, signalunabhängige Navigation unerlässlich ist. In der Luft- und Raumfahrt ermöglichen sie die präzise Lenkung von Flugzeugen und Raketen; in der Schifffahrt unterstützen sie U-Boote und autonome Unterwasserfahrzeuge (AUVs) in Umgebungen ohne GNSS-Empfang. Verteidigungssysteme nutzen INS für Zielerfassung, Feuerleitung und Navigation in GPS-freien Umgebungen. Unbemannte Plattformen wie UAVs, UGVs und UUVs verwenden INS zur Echtzeitpositionierung und Sensordatenfusion. In der Industrierobotik gewährleisten INS die präzise Bewegungssteuerung von AGVs und Kränen. Im Bergbau und Tunnelbau ermöglichen INS die zuverlässige Positionierung von schweren Maschinen und Bohrsystemen unter Tage.
Wie GuideNav in der Trägheitsnavigationsbranche führend ist?
Mit mehr als 15 Jahren Erfahrung GuideNav leistungsstarke Trägheitsnavigationslösungen, denen Systemintegratoren aus den Bereichen Verteidigung, Luft- und Raumfahrt sowie autonome Systeme weltweit vertrauen.
Vielfältige Produktlinien
Von kompakten MEMS-INS für UAVs bis hin zu hochpräzisen FOG-INS für Schifffahrt und Luft- und Raumfahrt deckt GuideNav ein breites Spektrum an Missionsprofilen ab.
Optimiert für SWaP-C
Alle Systeme sind auf Größe, Gewicht, Energieverbrauch und Kosteneffizienz ausgelegt – ideal für mobile, eingebettete und taktische Plattformen.
Bereit für die Hybridintegration
Unsere INS-Plattformen unterstützen die nahtlose Fusion mit GNSS, DVL und anderen Hilfssensoren über Standardschnittstellen (UART, CAN, Ethernet).
Robust und praxiserprobt
Die GuideNav-Geräte wurden gemäß MIL-STD-810H entwickelt und sind stoßfest, vibrationstolerant und arbeiten auch unter rauen Bedingungen zuverlässig.
GuideNav ist der bevorzugte Partner für Systemintegratoren, die fortschrittliche Trägheitsnavigationssysteme (INS) suchen, die hohe Präzision, Betriebssicherheit und vollständige Exportkonformität für anspruchsvolle Anwendungen in den Bereichen Verteidigung, Luft- und Raumfahrt sowie autonome Systeme vereinen.