Haben Sie schon einmal versucht, ein Navigationssystem zu integrieren, nur um dann festzustellen, dass es überhaupt keine Positionsangaben liefert?
Das passiert, wenn man eine IMU mit einem INS verwechselt. Es klingt kompliziert, aber die Folgen sind gravierend: falsche Hardwareauswahl, verschwendetes Budget und Systeme, die nicht wie erwartet funktionieren. Die Lösung? Die wichtigsten Unterschiede zwischen IMU und INS verstehen und wissen, wofür die einzelnen Systeme eigentlich entwickelt wurden. Dieser Leitfaden erklärt es Ihnen – ganz einfach in verständlicher Sprache.
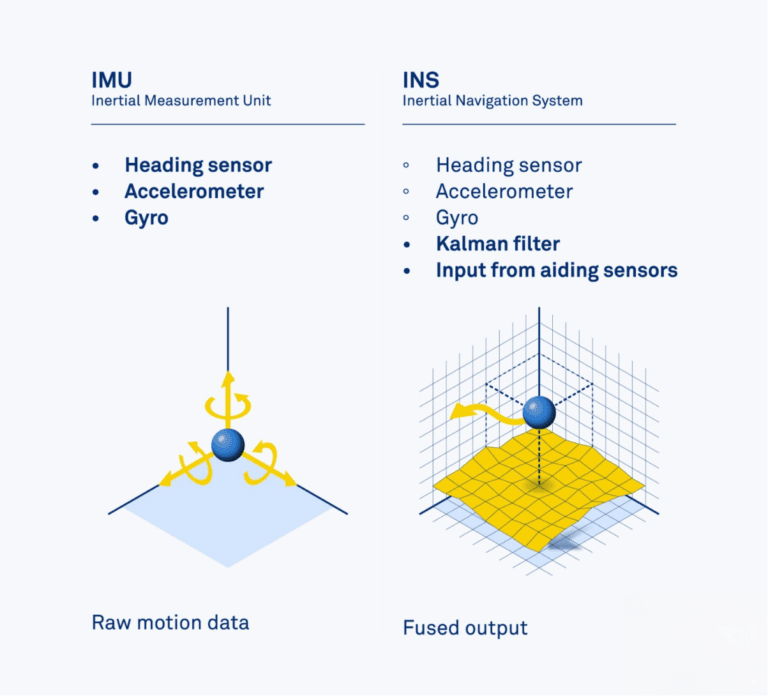
Eine IMU misst die Bewegung, während ein INS die IMU-Daten nutzt, um Position und Orientierung im Zeitverlauf zu berechnen – die IMU ist ein Sensor, das INS ein System.
Lasst uns die Verwirrung beseitigen – Schritt für Schritt.
Inhaltsverzeichnis

Was ist eine IMU?
Eine Inertialmesseinheit (IMU) ist ein Sensor, der Beschleunigung und Winkelgeschwindigkeit . Typischerweise mit MEMS-, FOG- oder HRG-Technologien gefertigt, umfasst eine IMU Beschleunigungsmesser, Gyroskope und mitunter Magnetometer . Sie liefert Rohdaten der Inertialmesseinheit, die zur Bewegungsschätzung im Raum verwendet werden. IMUs finden breite Anwendung in UAVs, Robotern, Fahrzeugen und Smartphones. Alleinstehend liefern sie jedoch keine Positions- oder Orientierungsinformationen , sofern sie nicht mit zusätzlicher Datenverarbeitung integriert werden. IMUs unterscheiden sich in ihrer Präzision – von kostengünstigen, kommerziellen Sensoren bis hin zu taktischen und Navigationssensoren wie dem GMS400 von GuideNav.

Was ist eine INS?
Ein Trägheitsnavigationssystem (INS) ist ein komplettes System, das IMU-Daten nutzt, um Position, Geschwindigkeit und Lage in Echtzeit zu berechnen. Es umfasst typischerweise:
- Ein eingebetteter IMU
- Ein leistungsstarker Onboard-Prozessor
- Sensorfusionsalgorithmen (z. B. Kalman-Filter )
- Oft wird ein GNSS-Modul zur Unterstützung verwendet
Das INS integriert IMU-Ausgaben in Echtzeit und ermöglicht so eine kontinuierliche Navigation. Dadurch kann es auch in GNSS-freien Umgebungen für eine begrenzte Zeit eingesetzt werden und ist daher unverzichtbar für die Luft- und Raumfahrt, die Schifffahrt und autonome Missionen . Systeme wie das GFS120 und GUIDE2D von GuideNav sind Beispiele für diese Integration.
Worin unterscheiden sich IMUs und INSs?
Die meisten Leute vereinfachen es, indem sie sagen: „Ein INS ist einfach ein IMU mit einem GNSS-Modul.“ Technisch gesehen ist das ein Anfang – aber es ist bei weitem nicht das ganze Bild.
Ja, ein INS verfügt über eine IMU als Kernkomponente. Es integriert aber auch einen Prozessor, GNSS (oft mit RTK- oder SBAS-Unterstützung) und mitunter externe Hilfssensoren wie Radencoder, Geschwindigkeitssensoren, barometrische Höhenmesser oder Doppler-Geschwindigkeitsmesser (DVL) . Diese Erweiterungen ermöglichen es dem INS, Daten in Echtzeit zu verarbeiten und so nicht nur Bewegungsdaten, sondern auch hochpräzise Schätzungen von Position, Geschwindigkeit und Orientierung zu liefern.
Stellen Sie sich eine IMU wie ein Thermometer vor – sie liefert die Rohdaten. Das INS ist der Wetterbericht: gefiltert, zusammengeführt und bereit zum Handeln.
| Besonderheit | IMU | INS |
|---|---|---|
| Kernfunktion | Misst Beschleunigung und Rotation | Berechnet Position, Geschwindigkeit und Orientierung |
| Komponenten | Beschleunigungsmesser, Gyroskop | IMU + GNSS + Prozessor + optionale Sensoren |
| Ausgabe | Rohdaten der Bewegung | Zusammengeführte Navigationsdaten (Echtzeit) |
| GNSS-Unterstützung | Keiner | Eingebaut (RTK/SBAS optional) |
| Externe Hilfe | Nicht zutreffend | Kilometerzähler, DVL, Geschwindigkeitsmesser, Höhenmesser usw. |
Kann man nur mit einem IMU navigieren?
Stellen Sie sich eine IMU wie das Gefühl von Bewegung bei geschlossenen Augen vor. Sie spüren, dass Sie sich vorwärts bewegen oder drehen – aber Sie haben keine Ahnung, wo Sie sich befinden. Genau das passiert, wenn Sie versuchen, nur mit einer IMU zu navigieren.
Natürlich kann man die Beschleunigung über die Zeit integrieren, um die Position zu schätzen. Doch kleine Fehler summieren sich schnell und führen innerhalb von Sekunden zu gravierenden Abweichungen. Dieses Phänomen nennt man Drift, und es macht eigenständige IMUs für die Navigation unzuverlässig.
Sie eignen sich hervorragend zur kurzfristigen Stabilisierung – beispielsweise zum Halten eines Gimbals im Gleichgewicht –, aber nicht, um Ihre Position oder Ihr Ziel zu bestimmen. Dafür benötigen Sie ein INS (Inertialnavigationssystem).
Wie verarbeitet ein INS IMU-Daten?
Anders als eine IMU, die lediglich Bewegung erfasst, interpretiert ein INS diese Bewegung und wandelt sie in umfassende Navigationsdaten um. Dazu gehört die Kenntnis des Standorts, der Geschwindigkeit und der Blickrichtung. Dies geschieht jedoch nicht automatisch. Es bedarf einer Reihe sorgfältig entwickelter Schritte – einer Kombination aus Physik, Mathematik und Echtzeitkorrektur –, um aus Rohsignalen zuverlässige Navigationsinformationen zu generieren.
Lassen Sie uns den Prozess gemeinsam durchgehen:
1. Bewegungserkennung (IMU-Eingang)
Alles beginnt mit der IMU, die kontinuierlich Beschleunigung (mittels Beschleunigungsmessern) und Winkelgeschwindigkeit (mittels Gyroskopen) misst. Diese Werte spiegeln wider, wie sich das System im dreidimensionalen Raum bewegt.
➡ Dieser Schritt verleiht dem INS seine grundlegende Bewegungserkennung.
2. Geschwindigkeit und Position berechnen
Das INS integriert die Beschleunigung, um die Geschwindigkeit zu ermitteln, und integriert anschließend die Geschwindigkeit, um die Position über die Zeit zu schätzen. Dies gibt dem System Auskunft darüber, wie weit es sich von seinem Startpunkt entfernt hat.
➡ So erfasst das INS Bewegungen – auch ohne GPS.
3. Orientierung einschätzen
Durch die Verarbeitung von Gyroskopdaten und unter Berücksichtigung von Vektoren wie der Schwerkraft und dem Erdmagnetfeld ermittelt das INS Rollen, Nicken und Gieren – Ihre vollständige 3D-Orientierung.
➡ Dieser Schritt hilft dem System zu verstehen, wie es gedreht oder geneigt ist.
4. Sensorfusion zur Verbesserung der Genauigkeit anwenden
Die IMU-Daten allein unterliegen mit der Zeit einer Drift. Das INS verwendet intelligente Algorithmen – wie Kalman-Filter –, um die IMU-Eingangsdaten mit anderen Sensoren zu kombinieren:
- GNSS / RTK / SBAS
- Radkilometerzähler
- DVL- oder Luftgeschwindigkeitssensoren
- Barometrische Höhenmesser
Diese Korrekturen verbessern die Genauigkeit und die Langzeitstabilität erheblich.
➡ Fusion sorgt für ein zuverlässiges System, selbst wenn einige Sensoren das Signal verlieren.
5. Echtzeit-Navigationsausgabe bereitstellen
Das Endergebnis ist ein kontinuierlicher Echtzeit-Datenstrom von Positions-, Geschwindigkeits- und Lagedaten, der mehrmals pro Sekunde aktualisiert wird und von Flugsteuerungen, Autopiloten oder Kartierungssystemen verwendet werden kann.
➡ Genau das macht das INS zu einer kompletten Navigationslösung.
Die INS-Produkte von GuideNav basieren auf dieser Architektur – mit Fusion-Engines, die speziell für GNSS-freie Bedingungen, dynamische Umgebungen und Plattformen mit starken Vibrationen optimiert sind. Das Ergebnis: zuverlässige Navigation, auf die Sie sich in kritischen Situationen verlassen können.
Wann ist eine IMU für Ihre Anwendung ausreichend?
Eine IMU reicht völlig aus, wenn Ihr System lediglich Bewegungen erfassen und nicht Position oder Richtung über die Zeit berechnen muss. Sie ist ideal, wenn Sie auf Bewegungen reagieren und nicht den absoluten Standort verfolgen.
Typische Anwendungsfälle sind:
Kamerastabilisierung
Erkennt Vibrationen oder Neigungen, um die Motoren dabei zu unterstützen, die Kamera ruhig zu halten.
Gestenverfolgung
Bei AR/VR-Anwendungen oder Wearables, wo man der Bewegung folgt – nicht der genauen Position.
Kurzfristige Orientierung
Wird bei Drohnen oder Robotern beim Start, Schweben oder bei schnellen Manövern verwendet.
Flugsteuerungsunterstützung
In Kombination mit GNSS oder optischem Fluss liefern IMUs schnelles Feedback zur Drohnenstabilisierung.
Beachten Sie: IMUs liefern lediglich Rohdaten für Beschleunigung und Rotation. Benötigen Sie Informationen zu Orientierung oder Geschwindigkeit, müssen Sie die Berechnungen selbst durchführen – Filter, Driftkorrektur usw.
Wenn das im Rahmen der Möglichkeiten Ihres Systems liegt, ist eine IMU eine leichte, kostengünstige und effiziente Lösung.
Wann braucht man wirklich eine Vollversicherung?
Ein vollständiges INS ist erforderlich, wenn Ihr System jederzeit die genaue Position und Ausrichtung – insbesondere in Umgebungen, in denen GNSS ausfallen oder nicht verfügbar sein kann.
Typische Anwendungsfälle sind:
- Umgebungen ohne GNSS-Empfang: wie Tunnel, Innenräume, Unterwasser oder Stadtschluchten
- Hochdynamische Plattformen: wie Drohnen, Raketen und Geländefahrzeuge, die schnelle und präzise Aktualisierungen benötigen
- Koppelnavigation: Hierbei muss das System die Navigation zwischen GNSS-Signalen – oder ganz ohne GNSS – aufrechterhalten.
- Präzisionskritische Aufgaben: wie Kartierung, Zielerfassung oder autonomes Fahren
In solchen Situationen würde eine IMU allein schnell driften, was zu unzuverlässigen Ergebnissen führen würde. Ein INS löst dieses Problem durch die Fusion von Inertialdaten mit GNSS und optionalen Sensoren wie DVL, Wegstreckenzählern oder Höhenmessern.
Was sind die häufigsten Fehler bei der Auswahl von IMU oder INS?
Seien wir ehrlich – bei Inertialsensoren kann man leicht die falsche Entscheidung treffen, besonders als Neuling auf diesem Gebiet. Ich habe schon unzählige Male erlebt, wie Teams das falsche Werkzeug ausgewählt haben. Und selten liegt es an der Technologie selbst, sondern meist an einem falschen Verständnis des Problems.

Hier läuft es meistens schief:
Fehler Nr. 1: Die Annahme, dass ein IMU die Position anzeigt
Nein. Ein IMU misst lediglich Ihre Geschwindigkeit bei Bewegungen oder Drehungen. Wer auf Echtzeit-Koordinaten hofft, wird enttäuscht sein.
Fehler Nr. 2: Verwendung eines Einsteiger-IMU für eine anspruchsvolle Aufgabe
Ein kostengünstiger Sensor mag auf dem Papier gut aussehen, aber sobald man ihn an einer sich schnell bewegenden Drohne oder einem Roboter befestigt, werden Rauschen und Drift die Daten ruinieren.
Fehler Nr. 3: Die Anschaffung eines INS, obwohl ein IMU ausgereicht hätte
Wenn Sie lediglich eine Kamera stabilisieren oder die grundlegende Ausrichtung erkennen müssen, ist ein vollständiges INS-System überdimensioniert. Versuchen Sie nicht, ein 300-Dollar-Problem mit einer 3000-Dollar-Lösung zu lösen.
Fehler Nr. 4: Vergessen der realen Umgebung
Die im Labor ermittelten Spezifikationen spiegeln nicht immer die Leistung im praktischen Einsatz wider. Starke Vibrationen, extreme Temperaturen oder Stoßbelastungen können billige Sensoren schnell außer Gefecht setzen.
Fehler Nr. 5: Unterschätzung des Integrationsaufwands
Die Rohdaten der IMU sind nicht einfach so nutzbar. Ohne die richtige Software, Filter oder Algorithmen liefert selbst der beste Sensor nicht die gewünschten Ergebnisse.
Welche Unterstützung bietet GuideNav bei der IMU/INS-Auswahl?
Bei GuideNav liefern wir nicht einfach nur Sensoren – wir helfen Ihnen beim Aufbau des passenden Systems . Wir bieten:
- Individuelle Bewerbungsberatung
- IMU/INS-Leistungsanpassung
- Integrationsleitfäden für UAVs, UGVs und maritime Systeme
- Datenblattzugriff und Evaluierungskits
- Schnelle technische Unterstützung
Egal, ob Sie eine energiearme Drohne oder ein GNSS-unfähiges Navigationssystem bauen, wir helfen Ihnen bei der Auswahl zwischen MEMS-IMU, FOG-IMU oder einem kompletten INS basierend auf Ihrem Missionsprofil.