Meine Erfahrung bei der Entwicklung von Inertialsystemen für den Feldeinsatz zeigt, dass Ingenieure oft eine trügerisch einfache Kennzahl übersehen: Angle Random Walk (ARW). Sie ist zwar nicht so spektakulär wie Bias-Stabilität oder Bandbreite, definiert aber die maximale Laufzeit, die Ihr System im praktischen Einsatz zuverlässig bleibt – insbesondere bei GNSS-Ausfall. ARW ist kein Fehler, den man durch Kalibrierung ausgleichen kann. Es ist das Rauschen, das sekündlich zunimmt. Sobald Sie seine Funktionsweise verstehen, ändert sich Ihre Herangehensweise an die Bewertung jedes einzelnen IMU auf Ihrem Prüfstand.
ARW ist keine Spezifikation, sondern ein Taktgeber. Vom Startzeitpunkt Ihrer IMU an zeigt er an, wie schnell die Orientierungstreue abnimmt. Je niedriger der Wert ist, desto länger bleibt Ihr System korrekt.
Im Laufe der Jahre habe ich erlebt, wie Teams IMUs anhand von Bias-Spezifikationen und Bandbreitendiagrammen auswählten und dann auf Drift stießen, die sich jeder Simulation entzog. Diese Drift rührte oft nicht von übersehenen Aspekten her, sondern von etwas, das nicht ausreichend gewichtet wurde: ARW. Sobald man erkennt, dass ARW den Rauschhorizont bestimmt, liest man Datenblätter anders. Man fragt nicht mehr: „Wie präzise ist das Gerät?“, sondern: „Wie lange kann ich mich darauf verlassen, bevor die Unsicherheit überhandnimmt?“
Inhaltsverzeichnis
Was genau ist Angle Random Walk (ARW)?
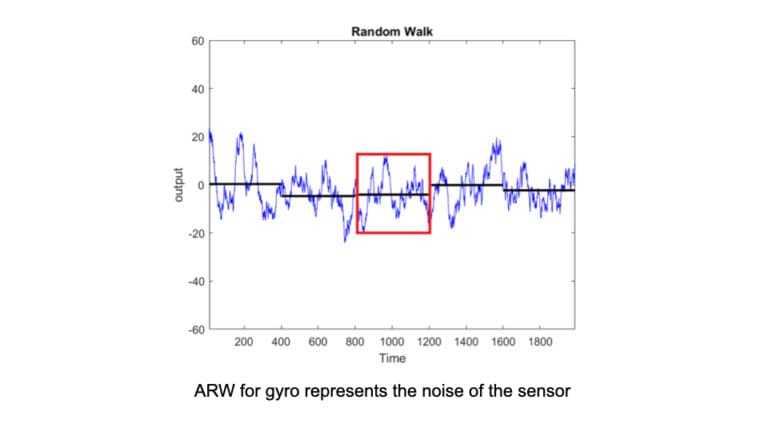
Vereinfacht ausgedrückt Angle Random Walk (ARW) das Rauschen, das Ihr Gyroskop akkumuliert, sobald Sie mit der Integration der Winkelgeschwindigkeit beginnen. Um es klarzustellen: Dies ist kein Messfehler oder Bias-Drift. ARW ist das mit der Quadratwurzel der Zeit zunehmende Unsicherheit , das durch weißes Rauschen im Signalpfad des Gyroskops entsteht. Es lässt sich nicht kalibrieren und man kann nicht warten, bis es sich stabilisiert – es ist immer vorhanden und wirkt im Hintergrund.
Ich erkläre jungen Ingenieuren ARW oft als die „Basislinienunschärfe“ ihrer Orientierungsschätzung . Dabei spielt es keine Rolle, ob sich die Plattform bewegt oder stillsteht. Selbst im Labor , mit einem absolut stabilen, fest am Tisch montierten Sensor, summiert sich ARW. Das macht es so grundlegend. Es ist kein Leistungsfehler – es ist Physik.
Wie wird ARW in der Praxis gemessen?
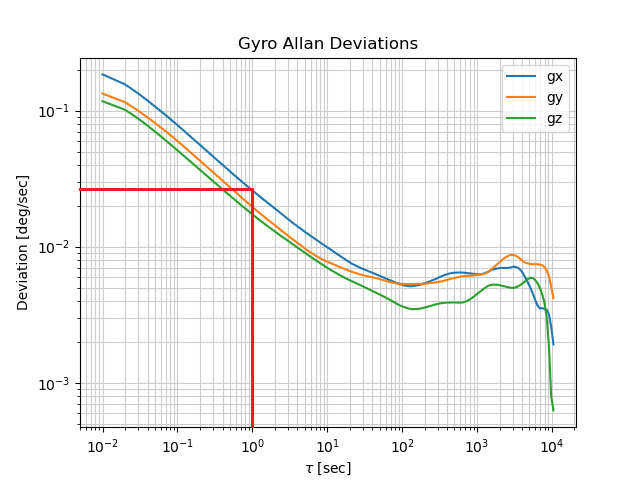
Der Goldstandard zur Messung des ARW ist die Allan-Varianzanalyse.
Dieses Verfahren zerlegt verschiedene Rauscharten über unterschiedliche Zeitintervalle. Bei kurzen Mittelungszeiten zeigt sich ARW als charakteristische Steigung von -½ in einem doppeltlogarithmischen Allan-Abweichungsdiagramm. Es ist das Kennzeichen von weißem Rauschen im Gyroskopsignal und bildet die Untergrenze für die Lagegenauigkeit.
Aber man kann sich nicht einfach auf das Datenblatt verlassen.
In meinem Arbeitsablauf führe ich stets kontrollierte statische Tests auf einer mechanisch isolierten Plattform durch, protokolliere die Rohdaten des Gyroskops und erstelle eigene Allan-Diagramme. Eine gleichmäßige Steigung über kurze Zeiträume zeigt mir die Stabilität des Gyroskops an. Ist die Steigung hingegen unregelmäßig oder verrauscht, weiß ich, dass die beworbene Genauigkeit von „0,05°/√h“ im praktischen Einsatz möglicherweise nicht zutrifft.
ARW ist nicht nur eine Zahl – es ist ein Muster, das man in realen Daten erkennen sollte.
Deshalb betrachte ich ARW als etwas, das überprüft werden muss, nicht nur als etwas, das man zitiert. Wenn Ihre Allan-Varianz nicht mit der Spezifikation übereinstimmt, könnte Ihr gesamter Fusionsstapel später darunter leiden.
Warum ist ARW für die IMU-Genauigkeit so wichtig?
Lärm, der niemals schläft
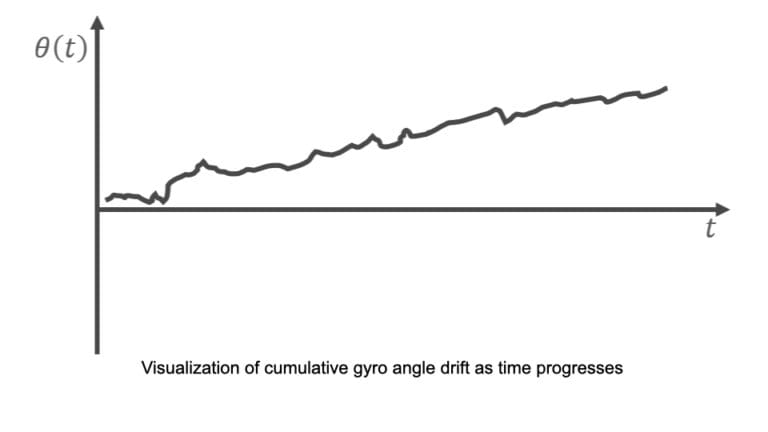
Im Gegensatz zu deterministischen Fehlern wie Bias oder Skalierungsfaktor führt ARW kontinuierlich zu Unsicherheiten in Ihrer Orientierungsschätzung. Da Gyroskope die Winkelgeschwindigkeit messen und diese über die Zeit integriert , summieren sich selbst kleine zufällige Schwankungen zu einer signifikanten Winkelabweichung. Die Auswirkungen sind nicht erst nach Minuten oder Stunden spürbar – auf hochempfindlichen Plattformen beginnt ARW die Genauigkeit innerhalb von Sekunden zu beeinträchtigen .
Die unsichtbare Grenze der Navigation
Der ARW-Wert setzt der Dauer, für die Ihre IMU eine zuverlässige Orientierung liefern kann, wenn externe Korrekturen (wie GNSS oder Magnetometer) nicht verfügbar sind, eine harte Grenze . Ich habe erlebt, wie perfekt abgestimmte Kalman-Filter allmählich die Kursgenauigkeit verloren, einfach weil der ARW-Wert des zugrundeliegenden Gyroskops für die Missionsdauer zu hoch war . Dies ist kein Softwareproblem, sondern eine physikalische Beschränkung. In jedem von mir entwickelten Trägheitssystem kann ich, sobald ich den ARW-Wert kenne, vorhersagen, wann die Navigation ausfällt. Und das ist ein entscheidender Vorteil.
Worin unterscheidet sich ARW von Bias-Instabilität?
| Angle Random Walk (ARW) | Bias-Instabilität |
|---|---|
| Kurzzeitiges Rauschen. Tritt sofort im Gyroskop-Ausgangssignal als kleine, zufällige Schwankungen auf. | Mittel- bis langfristige Drift. Eine langsame Verschiebung des Nullzinsniveaus im Laufe der Zeit. |
| Nimmt mit der Zeit zu. Führt zu einer kontinuierlichen Akkumulation des Orientierungsfehlers. | weist sie ein flaches Plateau auf – genau den „Buckel“, nach dem Ingenieure suchen. |
| Unvorhersehbar, aber begrenzt. Kann statistisch modelliert, aber nicht beseitigt werden. | Langsam veränderlich. Oft modelliert und teilweise mit Filtern kompensiert. |
| Überragend in Bezug auf die Genauigkeit über kurze Zeiträume. Besonders wichtig in sich schnell bewegenden, hochdynamischen Systemen. | Dominiert die Langzeitpräzision. Ist wichtig für Anwendungen wie hochpräzise INS-Systeme oder Langstreckennavigation. |
Warum diese Verwirrung?
Da sowohl ARW als auch Bias-Instabilität zu Drift führen – jedoch auf unterschiedliche Weise und in unterschiedlichen Zeiträumen –, verwechseln Ingenieure, die neu im Bereich der Trägheitssysteme sind, diese beiden Phänomene oft und nehmen an , Bias-Drift sei die einzige Fehlerquelle bei der Navigation. Meiner Erfahrung nach ist es jedoch häufig ARW, das die Leistung bei taktischen Missionen einschränkt , insbesondere dort, wo die Einsatzzeit ohne GNSS in Minuten und nicht in Stunden gemessen wird.
Was sind typische ARW-Werte für verschiedene IMUs?
In realen Projekten frage ich selten „Welche ist die beste IMU ?“, sondern eher „Welchen niedrigsten ARW-Wert kann ich innerhalb dieser Größe, dieses Gewichts und dieses Budgets erreichen?“ Der ARW-Wert ist oft die Spezifikation, die einem unauffällig verrät, ob ein Sensor für den privaten Gebrauch, für taktische Anwendungen oder für strategische Zwecke geeignet ist.
So habe ich die Aufschlüsselung von ARW über verschiedene Sensorklassen hinweg beobachtet:
| IMU-Klasse | Typischer ARW (°/√h) | Wo es hingehört |
|---|---|---|
| Consumer MEMS | 1 – 10 | Smartphones, Wearables, Einsteigerrobotik |
| Industrielle MEMS | 0.1 – 1 | Drohnen mit GNSS, leichte autonome Plattformen |
| Taktisches MEMS | 0.05 – 0.1 | Verteidigungsdrohnen, Waffenstabilisierung, Fahrzeuge |
| Navigationstauglicher Nebel | 0.001 – 0.01 | Schifffahrt, Luft- und Raumfahrt, Schienenverkehr, Langstrecken-UAVs |
| Strategische RLG | < 0.001 | U-Boote, Interkontinentalraketen, hochsichere Militärsysteme |
Ich behandle ARW wie einen Sperrfilter bei Designentscheidungen.
Wenn mein System 30 Minuten ohne GNSS auskommen und eine Kursgenauigkeit von 1° halten muss, reichen MEMS-Einheiten mit 0,2°/√h einfach nicht aus. Taktische MEMS schaffen das vielleicht gerade so. Wenn ich eine höhere Leistung benötige, bleibt mir nur die Option FOG oder gar nichts.
Was kommt als Nächstes?
Sie sollten nun ein klares Verständnis davon haben, was ARW ist, wie es gemessen wird und warum es wichtig ist. Doch die Theorie ist nur die halbe Wahrheit. Im zweiten Teil dieser Reihe zeige ich Ihnen, wie sich ARW in realen Systemen manifestiert – von der Drift unbemannter Luftfahrzeuge bis hin zu rein inertialen Missionen – und wie Ingenieure wie wir dies bei der Entwicklung berücksichtigen. Wir werden uns mit den taktischen Aspekten befassen: Softwarebeschränkungen, mechanische Isolation, Fusionsstrategien und harte ARW-Schwellenwerte für kritische Anwendungen.
→ Weiter zu Teil 2: Design mit Blick auf ARW
