Als erfahrener Experte für Trägheitssysteme kann ich bestätigen, dass die Trägheitsnavigation eine Kerntechnologie in vielen hochpräzisen Anwendungen darstellt – von militärischen Raketen und Raumfahrzeugen bis hin zu unbemannten Luftfahrzeugen (UAVs) und Robotern . Sie bietet ein zuverlässiges und autarkes Navigationssystem, insbesondere in Umgebungen, in denen GPS-Signale nicht verfügbar oder unzuverlässig sind.
Die Trägheitsnavigation ist ein Navigationsverfahren, das es einem Objekt – wie einer Rakete, einem Flugzeug, einem Raumschiff oder sogar einem Roboter – ermöglicht, seine Position und Ausrichtung ohne externe Referenzen wie GPS, Radar oder Funkfeuer zu bestimmen. Sie nutzt Trägheitssensoren wie Gyroskope und Beschleunigungsmesser , um Änderungen von Geschwindigkeit und Richtung zu messen und daraus Position und Flugbahn des Objekts zu berechnen.
Dieser Leitfaden erläutert die Kernkomponenten und Anwendungsbereiche der Trägheitsnavigation. Wir gehen auf die Grundlagen dieser Technologie ein und nutzen unsere langjährige Erfahrung, um zu zeigen, wie sie eine robuste und präzise Navigation ermöglicht.
Inhaltsverzeichnis
Was ist Trägheitsnavigation und was sind die Hauptkomponenten?
Aus meiner Erfahrung in der Zusammenarbeit mit verschiedenen Kunden aus den Bereichen Luft- und Raumfahrt, Verteidigung und Robotik weiß ich, dass die Leistungsfähigkeit jedes Trägheitsnavigationssystems von den verwendeten Komponenten abhängt. Hier sind die wichtigsten Bauteile, auf die ich mich in den von uns eingesetzten Systemen verlassen habe:
| Komponente | Beschreibung | Funktion |
|---|---|---|
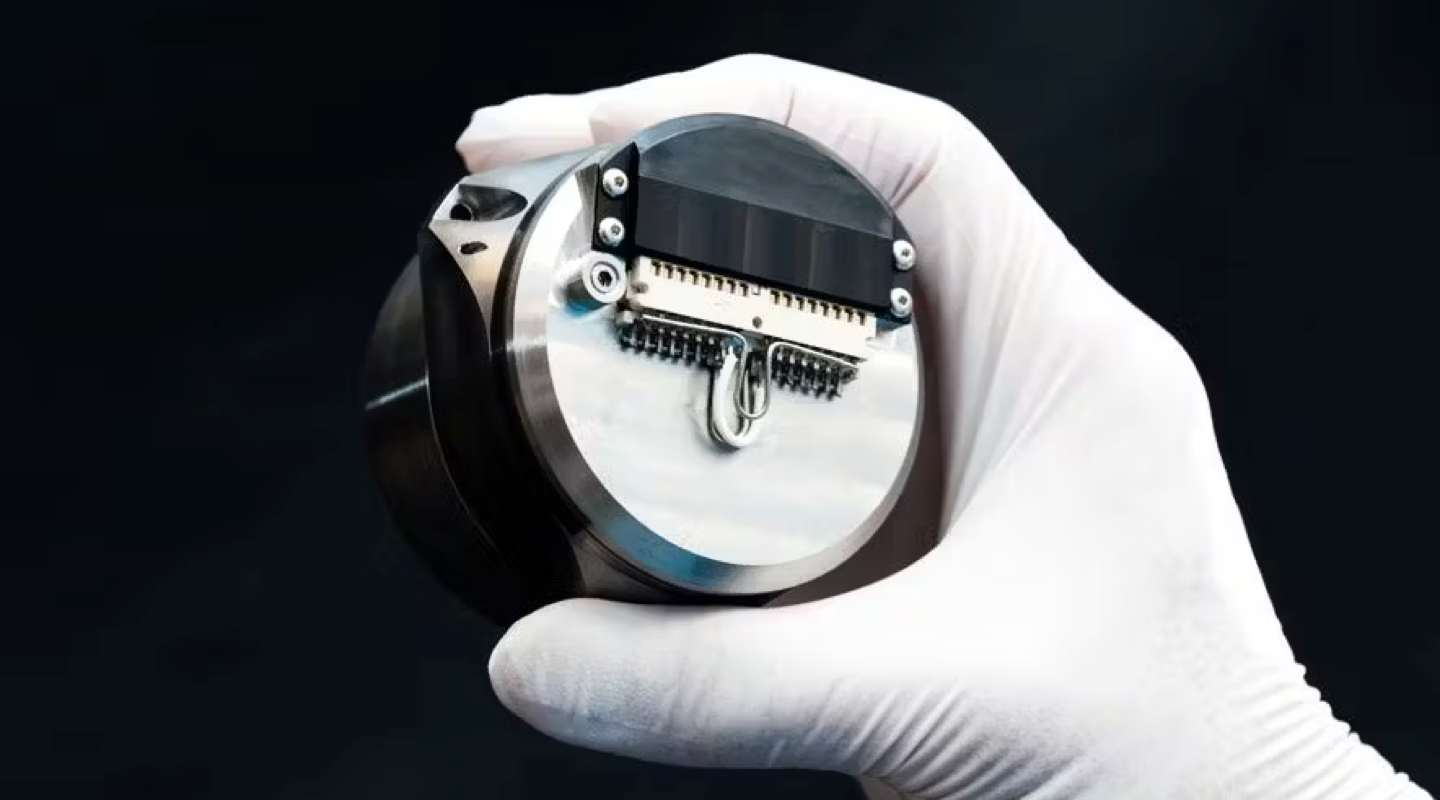
| Inertiale Messeinheit (IMU) | Das Herzstück des Systems besteht typischerweise aus Gyroskopen und Beschleunigungsmessern. | Misst Dreh- und Linearbewegungen, um Orientierung und Position zu bestimmen. |
| Gyroskope | Sensoren, die Drehbewegungen entlang dreier Achsen (Nick-, Roll- und Gierachse) messen. | Verfolgen Sie die Ausrichtung des Objekts und stellen Sie sicher, dass es auf Kurs bleibt. |
| Beschleunigungsmesser | Sensoren, die die lineare Beschleunigung entlang verschiedener Achsen messen. | Die Geschwindigkeitsänderungen werden gemessen, was zur Berechnung von Position und Geschwindigkeit beiträgt. |
| Navigationsalgorithmen | Mathematische Algorithmen, die die IMU-Daten verarbeiten, um Position, Geschwindigkeit und Orientierung zu berechnen. | Integrieren Sie Sensordaten, um Positionsbestimmungen in Echtzeit zu aktualisieren. |
| Steuerungssystem | Ein System, das die Bewegung des Objekts auf Basis der berechneten Position und Ausrichtung anpasst. | Stellt sicher, dass das Objekt einem vorgegebenen Pfad folgt oder sich an neue Ziele anpasst. |
| Stromversorgung | Versorgt die Trägheitssensoren und das Steuerungssystem mit Energie. | Hält das System am Laufen, oft mithilfe von Bordbatterien oder Energiemanagementeinheiten. |
| Rückkopplungsmechanismen (optional) | Externe Systeme wie GNSS, Magnetometer oder Barometer können integriert werden, um Drift und Fehler zu korrigieren. | Hilft dabei, etwaige Abweichungen im Trägheitssystem zu korrigieren und die Langzeitgenauigkeit zu verbessern. |
Wie funktionieren diese Komponenten zusammen?
In einem Trägheitsnavigationssystem müssen die Schlüsselkomponenten nahtlos zusammenarbeiten, damit das System Navigations- und Steuerungsaufgaben präzise und in Echtzeit ausführen kann. Aus meiner langjährigen Erfahrung weiß ich, dass die Synergie dieser Komponenten entscheidend für eine zuverlässige Leistung ist. Im Folgenden wird erläutert, wie diese Komponenten interagieren und zusammenarbeiten:
1. IMU-Datenerfassung
Kernstück des Systems ist die Inertialmesseinheit (IMU) , die aus Gyroskopen und Beschleunigungsmessern Beschleunigung und Rotationsbewegung des Objekts Ausrichtung des Objekts (z. B. Nick-, Roll- und Gierwinkel), während die Beschleunigungsmesser die lineare Beschleunigung und so Änderungen von Geschwindigkeit und Position erfassen. Diese Daten bilden die Grundlage für alle nachfolgenden Navigationsberechnungen.

2. Navigationsalgorithmen verarbeiten die Daten
Die vom IMU erfassten Daten werden an die Navigationsalgorithmen , die diese Informationen mithilfe mathematischer Modelle verarbeiten. Konkret werden die Sensordaten (Beschleunigung und Rotationsrate) über die Zeit integriert, um Position , Geschwindigkeit und Orientierung . Diese Berechnungen liefern Navigationsdaten in Echtzeit, die zur Steuerung des Systems und zur Führung des Objekts entlang seines Pfades verwendet werden.

3. Das Steuerungssystem passt die Bewegung an
Anhand der Ergebnisse der Navigationsalgorithmen passt das Steuerungssystem die Bewegung des Objekts in Echtzeit an. Weicht das Objekt beispielsweise von seiner Sollbahn ab, korrigiert das Steuerungssystem den Kurs durch Anpassung des Antriebssystems oder der Steuerflächen (wie Ruder oder Triebwerke) und stellt so sicher, dass das Objekt auf dem vorgesehenen Pfad bleibt.
4. Rückkopplungsmechanismen korrigieren Drift
Viele Trägheitsnavigationssysteme sind mit Rückkopplungsmechanismen wie GNSS (Globales Navigationssatellitensystem) oder anderen externen Sensoren (z. B. Magnetometer, Barometer) ausgestattet. Diese Rückkopplungssysteme arbeiten mit der IMU zusammen, um Abweichungen und Fehler im Laufe der Zeit zu korrigieren. Insbesondere bei Langzeitmissionen liefern die externen Sensoren periodische Korrekturen zur Rekalibrierung des Trägheitssystems und gewährleisten so die Aufrechterhaltung der Genauigkeit über lange Zeiträume.
5. Die Stromversorgung gewährleistet die Systemstabilität
Die Stromversorgung ist für den Betrieb aller Systemkomponenten unerlässlich. Sie gewährleistet die kontinuierliche Energieversorgung von IMU, Steuerungssystem, Navigationsalgorithmen und Rückkopplungsmechanismen. Ein effizientes Energiemanagement ist insbesondere für Langzeitbetriebe, wie beispielsweise in Raumfahrzeugen oder Raketenleitsystemen, von entscheidender Bedeutung, da Zuverlässigkeit und Stabilität hier höchste Priorität haben.
Anwendungen der Trägheitsnavigation
Die Trägheitsnavigation ist eine Basistechnologie in einer Vielzahl von Branchen, die autonome Navigation und präzise Steuerung . Die Fähigkeit, ohne externe Signale wie GPS oder Funksignale zu arbeiten, macht die Trägheitsnavigation in vielen kritischen Anwendungen unverzichtbar. Im Folgenden sind die wichtigsten Anwendungsbereiche von Trägheitsnavigationssystemen aufgeführt:
1. Militär und Verteidigung
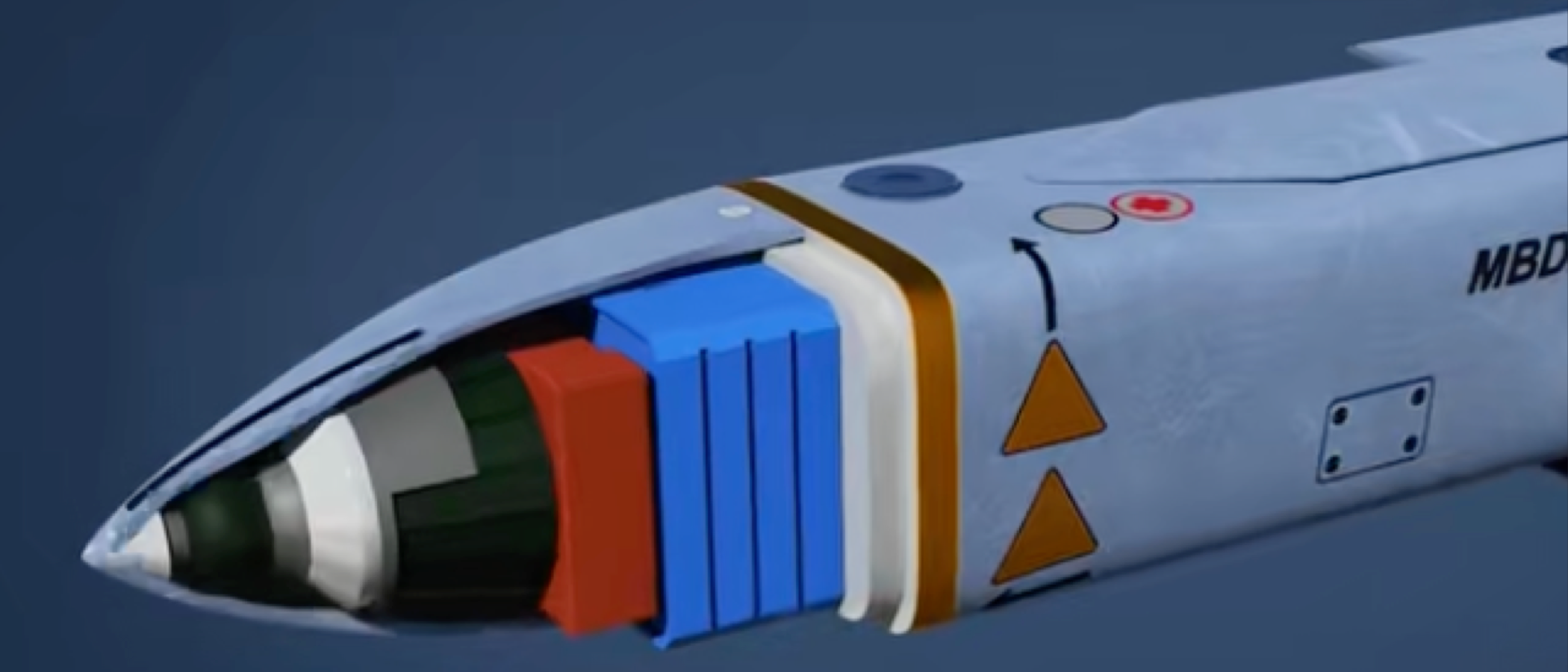
Eine der bekanntesten Anwendungen der Trägheitsnavigation findet sich im Militär- und Verteidigungsbereich . Trägheitsnavigationssysteme sind unerlässlich für die Lenkung von Raketen , Torpedos und unbemannten Luftfahrzeugen (UAVs) . Diese Systeme gewährleisten, dass die Projektile oder Fahrzeuge auch in Umgebungen, in denen GPS-Signale nicht verfügbar oder absichtlich gestört sind, auf dem korrekten Kurs zum Ziel bleiben.
| Anwendung | Zweck | Hauptvorteil |
|---|---|---|
| Raketenlenkung | Stellt sicher, dass Raketen ihre beabsichtigten Ziele treffen | Bietet Präzision und Unabhängigkeit von externen Signalen |
| Torpedos | Verfolgt Unterwasserziele in GPS-freien Umgebungen | Funktioniert in U-Boot- und Unterwasserumgebungen ohne Abhängigkeit von externen Signalen |
| UAVs (Drohnen) | Autonomer Flug für Überwachungs- und Aufklärungszwecke | Funktioniert in städtischen Gebieten oder GPS-freien Zonen , in denen Satellitensignale möglicherweise schwach sind. |
2. Luft- und Raumfahrt
In der Luft- und Raumfahrt ist die Trägheitsnavigation unerlässlich für die Navigation von Raumfahrzeugen , die Lageregelung von Flugzeugen und die Satellitenpositionierung . Sie ermöglicht von Weltraummissionen ohne externe Quellen, was insbesondere für die Erforschung des Weltraums oder für Satellitensysteme ohne GPS-Signale von Bedeutung ist.
| Anwendung | Zweck | Hauptvorteil |
|---|---|---|
| Raumschiffnavigation | Gewährleistet präzise Bewegung und Orientierung im Raum | Ermöglicht autonome Steuerung im Weltraum |
| Flugzeuglageregelung | Hält die Nick-, Gier- und Rollachse des Flugzeugs aufrecht | Gewährleistet Stabilität und Kontrolle bei Turbulenzen |
| Satellitenpositionierung | Hält Satelliten in der Umlaufbahn oder auf dem richtigen Kurs | Funktioniert im Weltraum ohne GPS. |
3. Autonome Fahrzeuge
Die Trägheitsnavigation ist eine entscheidende Komponente autonomer Fahrzeuge . Ob selbstfahrende Pkw , autonome Lkw oder Drohnen – sie trägt zu einer präzisen Navigation bei, selbst wenn GPS-Signale schwach, blockiert oder nicht verfügbar sind. Sie ermöglicht eine genaue Lokalisierung in urbanen Umgebungen oder unterirdischen Bereichen , wo GPS nicht zuverlässig funktioniert.
| Anwendung | Zweck | Hauptvorteil |
|---|---|---|
| Selbstfahrende Autos | Gewährleistet autonome Navigation in städtischen Umgebungen | Ermöglicht Positionsverfolgung in Echtzeit ohne GPS |
| Autonome Lkw | Ermöglicht es Lkw, auf Autobahnen oder in Lagerhallen zu navigieren | Ermöglicht unabhängige Navigation in GPS-freien Zonen |
| Drohnen | Ermöglicht Drohnen die Navigation ohne GPS oder in unübersichtlichen Bereichen | Gewährleistet einen sicheren und präzisen Flug in städtischen oder Innenräumen |
4. Schiffs- und Unterwassernavigation
Trägheitsnavigationssysteme finden breite Anwendung in der Schifffahrt und Unterwasserforschung . U-Boote , autonome Unterwasserfahrzeuge (AUVs) und ferngesteuerte Unterwasserfahrzeuge (ROVs) nutzen sie zur Navigation in der Tiefsee , wo GPS-Signale nicht empfangen werden können. Diese Systeme ermöglichen eine präzise Positionsbestimmung und Ausrichtungskorrektur, um korrekte Bewegungen und Erkundungen zu gewährleisten.
| Anwendung | Zweck | Hauptvorteil |
|---|---|---|
| U-Boote | Autonome Navigation unter Wasser | Bietet autarke Navigation in GPS-freien Umgebungen |
| AUVs (Autonome Unterwasserfahrzeuge) | Ermöglicht Unterwassererkundung und Datenerfassung | Funktioniert in tiefen Gewässern ohne GPS-Abhängigkeit |
| ROVs (ferngesteuerte Fahrzeuge) | Wird zur Fernsteuerung und Navigation unter Wasser verwendet | Gewährleistet präzise Bewegungen für Aufgaben wie Inspektion und Vermessung |
5. Robotik und industrielle Automatisierung
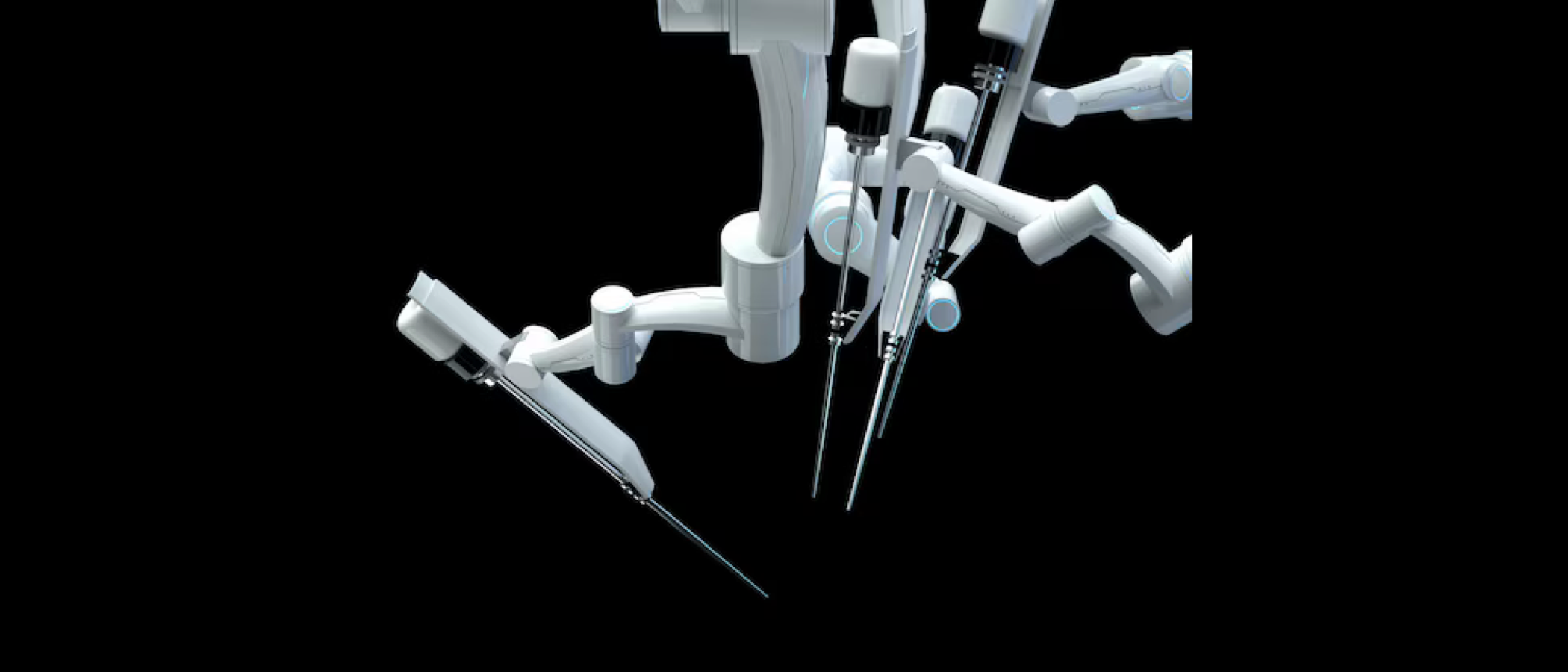
In der Robotik und industriellen Automatisierung trägt die Trägheitsnavigation zur Positions- und Orientierungsstabilität von Roboterarmen , fahrerlosen Transportsystemen (FTS) und anderen automatisierten Systemen bei. Diese Systeme nutzen die Trägheitsnavigation für eine präzise Bahnplanung und Bewegungsverfolgung , um Aufgaben in Fabriken, Lagerhallen oder auch in Gefahrenbereichen auszuführen.
| Anwendung | Zweck | Hauptvorteil |
|---|---|---|
| Roboterarme | Sorgt für Präzision bei Aufgaben wie Montage oder Fertigung | Ermöglicht es Robotern, Aufgaben autonom und mit hoher Genauigkeit auszuführen |
| AGVs (Automatisierte Fahrerlose Fahrzeuge) | Autonomes Navigieren in Lagerhallen oder Fabriken | Gewährleistet effiziente Bewegungs- und Pfadverfolgung in Innenräumen |
| Roboterchirurgie | Gewährleistet präzise Bewegungen während der Operation | Bietet eine präzise Führung für chirurgische Instrumente bei minimalinvasiven Operationen |
Worin unterscheidet sich die Trägheitsführung von Trägheitsnavigationssystemen?
Trägheitsführungssysteme und Trägheitsnavigationssysteme sind zwei eng verwandte, aber unterschiedliche Technologien, die verschiedenen Zwecken dienen. Das Verständnis der Unterschiede zwischen ihnen ist entscheidend für die Auswahl des richtigen Systems für spezifische Anwendungen.
Bei der Trägheitsnavigation geht es primär um die Führung und Steuerung der Bewegung eines Objekts, beispielsweise einer Rakete, Drohne oder eines Raumfahrzeugs. Diese Systeme erfassen nicht nur die Position des Objekts, sondern korrigieren aktiv dessen Flugbahn, um sicherzustellen, dass es auf Kurs bleibt. Trägheitsnavigationssysteme (INS) erfassen und melden Position, Geschwindigkeit und Ausrichtung des Objekts, ohne dessen Bewegung direkt zu korrigieren. INS liefern zwar die Daten , steuern die Bewegung des Objekts aber nicht direkt.
Meiner Erfahrung nach ist das Verständnis der funktionalen Unterschiede zwischen diesen Systemen entscheidend für deren effektive Anwendung in Bereichen wie Verteidigung , Luft- und Raumfahrt sowie autonome Fahrzeuge . Bei der Trägheitsnavigation geht es um Echtzeit- Pfadkorrektur und Zielerfassung , während es bei der Trägheitsnavigation um Positionsverfolgung und die Aufrechterhaltung eines präzisen Bezugssystems über die Zeit geht.
1. Hauptfunktion
- Trägheitsnavigationssysteme (IGS) : Die Hauptfunktion eines Trägheitsnavigationssystems besteht darin , die Bewegung eines Objekts (z. B. einer Rakete, Drohne oder eines Raumfahrzeugs) zu einem bestimmten Ziel zu steuern und zu lenken das Objekt durch kontinuierliche Anpassung seiner Flugbahn auf Basis der Daten seiner internen Sensoren (hauptsächlich Gyroskope und Beschleunigungsmesser) zu führen. Das System nimmt Echtzeitkorrekturen vor, um sicherzustellen, dass das Objekt auf dem richtigen Weg zum Ziel bleibt.
- Trägheitsnavigationssysteme (INS) : Im Gegensatz zu herkömmlichen Navigationssystemen dienen Trägheitsnavigationssysteme der Positionsbestimmung und -verfolgung. Sie berechnen kontinuierlich Position, Geschwindigkeit und Orientierung anhand der Daten von Beschleunigungsmessern und Gyroskopen. Hauptziel eines INS ist die Verfolgung von Position und Geschwindigkeit eines Objekts ohne externe Referenzen (z. B. GPS). Es steuert die Bewegung des Objekts nicht direkt, sondern liefert präzise Positions- und Geschwindigkeitsdaten .
2. Kontrolle vs. Nachverfolgung
- Trägheitsnavigationssysteme : Diese Systeme erfassen nicht nur Position und Ausrichtung eines Objekts, sondern steuern auch dessen Bewegung . Das Navigationssystem berechnet die notwendigen Anpassungen, um eine bestimmte Flugbahn zum Ziel beizubehalten. Beispielsweise passt das Trägheitsnavigationssystem bei einer Rakete deren Flugbahn an, um sicherzustellen, dass sie ihr Ziel erreicht, indem es Geschwindigkeit, Richtung und Höhe der Rakete in Echtzeit korrigiert.
- Trägheitsnavigationssysteme ( INS) konzentrieren sich hingegen stärker auf die Positionsbestimmung . Sie erfassen und melden die Position eines Objekts im Raum und werden häufig in Verbindung mit anderen Systemen (wie GPS) zur Korrektur eingesetzt. Ein INS steuert nicht unbedingt die Bewegung des Objekts, liefert aber wichtige Navigationsdaten , sodass die Bediener genau wissen, wo sich das Objekt befindet und wohin es sich bewegt.
3. Anwendungsbeispiele
- TrägheitsnavigationssystemeDiese findet man typischerweise in Militär, Weltraumforschung, Und autonome FahrzeugeSie dienen dazu, Projektile (z. B. Raketen), Raumfahrzeuge oder Drohnen zu lenken und sicherzustellen, dass diese auf Kurs bleiben, um ein Ziel zu treffen oder eine Mission zu erfüllen. Zum Beispiel:
- Die Raketenlenkung gewährleistet, dass die Rakete ihr Ziel erreicht, indem sie ihre Flugbahn ständig anhand von Trägheitsmessungen anpasst.
- Raumfahrzeuge nutzen die Trägheitsnavigation, um ihre Flugbahn anzupassen und ihre Ausrichtung im Weltraum beizubehalten.
- Unbemannte Luftfahrzeuge (UAVs) nutzen die Trägheitsnavigation zur Zielverfolgung und zum autonomen Flug .
- TrägheitsnavigationssystemeINS-Systeme werden hauptsächlich eingesetzt in Luft- und Raumfahrt, Marine, Und RobotikAnwendungen, bei denen die genaue Kenntnis von Position und Ausrichtung eines Objekts von entscheidender Bedeutung ist. Zum Beispiel:
- Flugzeuge nutzen INS zur Navigation bei Flügen über lange Strecken, insbesondere außerhalb des GPS-Bereichs.
- U-Boote nutzen INS zur Unterwassernavigation, wo GPS-Signale nicht empfangen werden können.
- Robotik nutzt INS zur Positionsverfolgung und autonomen Bewegung innerhalb eines definierten Bereichs.
4. Echtzeitkorrekturen
- Trägheitsnavigationssysteme : Das Navigationssystem nutzt häufig Echtzeitdaten, um sofortige Korrekturen vorzunehmen. Es passt die Flugbahn des Objekts kontinuierlich an, um sicherzustellen, dass es sein Ziel erreicht. Dabei werden oft Zielverfolgungs- und Rückkopplungsmechanismen (wie externe Sensoren oder GPS) eingesetzt, um Abweichungen zu korrigieren.
- Trägheitsnavigationssysteme (INS Positionsdaten in Echtzeit , korrigiert aber in der Regel nicht die Flugbahn eines Objekts. Stattdessen nutzt es externe Korrekturen Sensorungenauigkeiten verursachte Drift im Laufe der Zeit zu reduzieren . Das INS verfolgt die Bewegung, wirkt aber nicht als Korrektur- oder Führungskraft.
5. Systemkomplexität
- Trägheitsnavigationssysteme : Diese Systeme sind in der Regel komplexer , da sie nicht nur Position und Orientierung berechnen, sondern auch die Bewegung aktiv anpassen . Dies erfordert hochentwickelte Regelalgorithmen und die Integration mit anderen Führungs- oder Zielverfolgungssystemen. Führungssysteme umfassen häufig Mechanismen wie Servomotoren , Schubregler und Flugsteuerungssysteme um Korrekturen in Echtzeit vorzunehmen.
- Trägheitsnavigationssysteme ( INS): INS-Systeme sind Vergleich zu Führungssystemen konzeptionell einfacher Sensorfusionsalgorithmen Positionsverfolgung unerlässlich , steuern aber nicht die Bewegung des Objekts.
Zusammenfassung der Unterschiede:
| Aspekt | Trägheitsnavigationssysteme (IGS) | Trägheitsnavigationssysteme (INS) |
|---|---|---|
| Hauptfunktion | Führt und steuert die Bewegung | Erfasst Position, Geschwindigkeit und Orientierung |
| Kontrolle | Steuert die Bewegung des Objekts (Echtzeitkorrekturen) | Steuert keine Bewegung, sondern verfolgt nur die Position |
| Anwendungen | Militär (Raketen), Luft- und Raumfahrt (Raumfahrzeuge), UAVs | Luft- und Raumfahrt, Schifffahrt, Robotik, autonome Fahrzeuge |
| Korrekturen | Echtzeit-Anpassungen der Flugbahn | Liefert Daten; erfordert im Laufe der Zeit externe Korrekturen |
| Komplexität | Komplexer aufgrund von Steuerungs- und Führungsfunktionen | Einfacher, hauptsächlich für die Positionsverfolgung |
| Rückmeldung | Nutzt häufig Feedback zur Anpassung der Flugbahn | Verwendet typischerweise interne Sensoren und gelegentliche externe Korrekturen |
Die Zukunft der Trägheitsnavigation
1. Verbesserte Präzision und Autonomie in der Verteidigung
Im militärischen Bereich die Trägheitsnavigation bereits in Lenkflugkörpern , unbemannten Luftfahrzeugen (UAVs) und autonomen Drohnen . Mit der Verbesserung von Sensorfusion und KI-Algorithmen werden zukünftige Systeme eine noch höhere Präzision, größere Autonomie und die Fähigkeit zum Betrieb in Umgebungen bieten, in denen externe Signale ( z . B. GPS) nicht verfügbar oder gestört sind.
Was kommt als Nächstes?
- Vollautonome Lenkflugkörper mit Echtzeit- Kurskorrekturen .
- Selbstnavigierende UAVs, die in der Lage sind, Missionen ohne externe Unterstützung durchzuführen.
2. Weltraumforschung und Satellitensteuerung
Im Bereich der Weltraumforschung bleibt die Trägheitsnavigation ein autonome Raumsonden und die Satellitennavigation . Mit zunehmender Komplexität und Reichweite von Weltraummissionen wird die Trägheitsnavigation eine unterbrechungsfreie Steuerung im Weltraum und jenseits der Erdatmosphäre gewährleisten.
Was kommt als Nächstes?
- Hochentwickelte Trägheitssysteme für interplanetare Missionen, die präzise Kurskorrekturen .
- Autonome Raumsonden, die ohne Abhängigkeit von erdgebundenen Systemen navigieren.
3. Integration mit KI für adaptive Leistung
Zukünftige Trägheitsnavigationssysteme KI und maschinelles Lernen integrieren , wodurch sie sich dynamisch an veränderliche Umgebungen anpassen können. Diese Integration verbessert die Fehlerkorrektur , die Driftkompensation und optimiert die Flugbahnanpassungen auf Basis von Echtzeitdaten und Missionsparametern.
Was kommt als Nächstes?
- Selbstlernende Leitsysteme , die ihre Leistung im Flug oder in der Bewegung kontinuierlich anpassen.
- KI-gestützte Entscheidungsfindung für autonome Drohnen und militärische Anwendungen zur Verbesserung der betrieblichen Effizienz.
4. Verbesserte Haltbarkeit und Zuverlässigkeit in rauen Umgebungen
Da Trägheitsnavigationssysteme in immer anspruchsvolleren Umgebungen wie der Tiefsee oder dem Weltraum , wird sich ihre Robustheit deutlich verbessern. Dank fortschrittlicher Materialien und innovativer Konstruktionen werden diese Systeme langlebiger und zuverlässiger und widerstehen extremen Temperaturen, Druckschwankungen und Vibrationen.
Was kommt als Nächstes?
- Robuste Trägheitssysteme für U-Boote , Weltraumforschung und militärische Hochleistungsanwendungen .
- Redundante Systeme gewährleisten Zuverlässigkeit auch in den widrigsten Umgebungen.
5. Miniaturisierung und Integration mit autonomen Systemen
Die Miniaturisierung von Inertialsensoren wird sich fortsetzen und kleinere, stärker integrierte Systeme für den Einsatz in autonomen Fahrzeugen , Robotern und Drohnen . Diese kleineren Systeme reduzieren nicht nur Gewicht und Kosten, sondern verbessern auch die Leistungsfähigkeit der autonomen Steuerung und Navigation .
Was kommt als Nächstes?
- Kleinere Trägheitsnavigationssysteme werden in autonome Bodenfahrzeuge und Drohnen die Unabhängigkeit in GPS-freien Gebieten zu verbessern
- Autonome Navigation komplexer Umgebungen mit Echtzeit-Trägheitsnavigation .