Inertialmesseinheiten (IMUs) bilden das Rückgrat der Navigationssysteme von Loitering-Raketen. Sie liefern die notwendigen Daten, um die Rakete hochpräzise zum Ziel zu lenken. Ohne eine zuverlässige IMU hätte eine Rakete Schwierigkeiten, eine stabile Flugbahn beizubehalten, was ihre Mission gefährden könnte.
Eine Inertialmesseinheit (IMU) ist ein Gerät, das Beschleunigung, Geschwindigkeit und Ausrichtung eines Objekts misst. Die IMU spielt eine entscheidende Rolle für ein Loitering-Missile, um sicherzustellen, dass es sein Ziel präzise erreicht.
In diesem Artikel werde ich die wichtigsten Komponenten einer IMU, die wichtigsten Kennzahlen für Loitering-Missionsanwendungen und den am besten geeigneten IMU-Typ für diese risikoreichen Operationen erläutern.
Inhaltsverzeichnis
Was ist eine Inertialmesseinheit (IMU)?
Eine Inertialmesseinheit (IMU) misst Beschleunigung, Geschwindigkeit und Ausrichtung eines Objekts. Sie arbeitet ohne externe Signale. Diese Unabhängigkeit macht sie ideal für Umgebungen, in denen GPS-Signale unzuverlässig sein können. In einer IMU befinden sich typischerweise Beschleunigungsmesser und Gyroskope. Diese Sensoren arbeiten zusammen, um Bewegung und Rotation zu erfassen und so die präzise Flugbahn des Flugkörpers zu gewährleisten.
Als Ingenieur mit über acht Jahren Erfahrung in der Trägheitsnavigationsbranche kann ich Ihnen versichern, dass die Hauptaufgabe der IMU darin besteht, Echtzeitdaten Langstreckenflüge und gezielte Angriffe unerlässlich .
Warum sind Loitering Missiles auf Inertial Measurement Units (IMUs) angewiesen?
Loitering-Raketen sind so konstruiert, dass sie über längere Zeiträume in der Luft bleiben und ein Ziel überwachen. Präzise Navigation ist hierfür unerlässlich. Die IMU (Inertial Measurement Unit) ermöglicht es der Rakete, ihren Kurs kontinuierlich anzupassen und Änderungen der Geschwindigkeit, des Windes oder anderer Umwelteinflüsse auszugleichen. Fehlen der Rakete genaue Positionsdaten, kann sie vom Kurs abkommen. Dies könnte zum Fehlschlagen der Mission oder, schlimmer noch, zu einem Fehlschlag gegen das Ziel führen.
Bei Raketensystemen geht es bei hochpräzisen Daten nicht nur darum, die Rakete grob zu steuern. Es geht vielmehr darum, sicherzustellen, dass die Rakete über große Entfernungen präzise und zuverlässig manövrieren kann. Die IMU (Inertial Measurement Unit) ist der Schlüssel zu dieser Präzision. Ohne sie könnte die Rakete keine Kurskorrekturen in Echtzeit vornehmen. Das bedeutet höhere Risiken, mehr Ressourcenverschwendung und weniger erfolgreiche Missionen.
Schlüsselparameter für Loitering Missile IMUs
Bei IMUs für Loitering-Raketen Präzision unerlässlich. Es gibt jedoch weitere wichtige Parameter zu berücksichtigen. Die Bias-Stabilität der IMU ist entscheidend, da jede Abweichung im Laufe der Zeit zu Fehlern führen kann. Ebenso bestimmt die Driftrate, wie stark das System abweichen darf, bevor eine Neukalibrierung erforderlich ist. Die IMU muss zudem Datenaktualisierungen schnell und mit minimaler Latenz . Geschwindigkeit ist für Echtzeit-Anpassungen entscheidend.
| Parameter | Beschreibung | Bedeutung für Loitering Missiles |
|---|---|---|
| Präzision | Die Fähigkeit der IMU, Bewegungen exakt zu messen. | Notwendig, um die Rakete bei langen Flügen auf Kurs zu halten. |
| Bias-Stabilität | Die Beständigkeit der Sensormesswerte im Zeitverlauf. | Verhindert ein allmähliches Abdriften, das die Flugbahn der Rakete beeinträchtigen könnte. |
| Driftgeschwindigkeit | Die Rate, mit der die Messwerte der IMU abweichen. | Geringe Drift gewährleistet kontinuierliche Genauigkeit ohne Neukalibrierung. |
| Latenz | Die Verzögerung zwischen Sensoreingang und -ausgang. | Eine schnelle Verarbeitung ist für sofortige Kurskorrekturen unerlässlich. |
Als jemand mit jahrelanger Erfahrung im Bereich der Trägheitsnavigationssysteme weiß ich aus erster Hand, wie entscheidend geringe Drift und schnelle Reaktionszeiten für den Erfolg einer Mission sein können. IMUs mit schlechter Bias-Stabilität oder hohen Driftraten können die erforderliche Leistung einfach nicht erbringen, insbesondere in Raketensystemen, die schnelle und häufige Anpassungen erfordern.
Genauigkeitsanforderungen an die IMU von Loitering Missiles
Die Genauigkeit (Bias-Stabilität) der Trägheitsmesseinheit für einen Loitering-Raketenkörper kann je nach Komplexität der Mission und der Abhängigkeit von externen Navigationssystemen variieren. Nachfolgend eine Zusammenfassung der Bias-Stabilität für verschiedene Szenarien:
1. Hochpräzise Angriffsmissionen (z. B. präzisionsgelenkte Angriffe)
- Bias-Stabilität : 0,1°/h bis 0,1°/h
Grund:
- Für eine präzise Zielbekämpfung ist höchste Präzision erforderlich, insbesondere bei komplexen Missionsszenarien, die Präzisionsschläge beinhalten.
- Die IMU muss einen stabilen Flug und eine genaue Zielerfassung gewährleisten, insbesondere während des Endanflugs.
Empfohlener IMU - Typ : Faseroptisches Gyroskop - basiertes IMU
Empfohlenes FOG- IMU-Modell: GFIMU 400, GFIMU 500

2. Missionen mit mittlerer Präzision (z. B. allgemeine Gefechtsfeldangriffe)
- Bias-Stabilität : 1°/h bis 0,5°/h
Grund:
- Eine moderate Präzision ist für allgemeine Gefechtsfeldmissionen erforderlich, bei denen das Ziel weniger kritisch oder das Einsatzgebiet flexibler sein kann.
- Zur Aufrechterhaltung der Genauigkeit kann die IMU durch andere Leitsysteme, wie z. B. visuelle oder GPS-basierte Systeme, ergänzt werden.
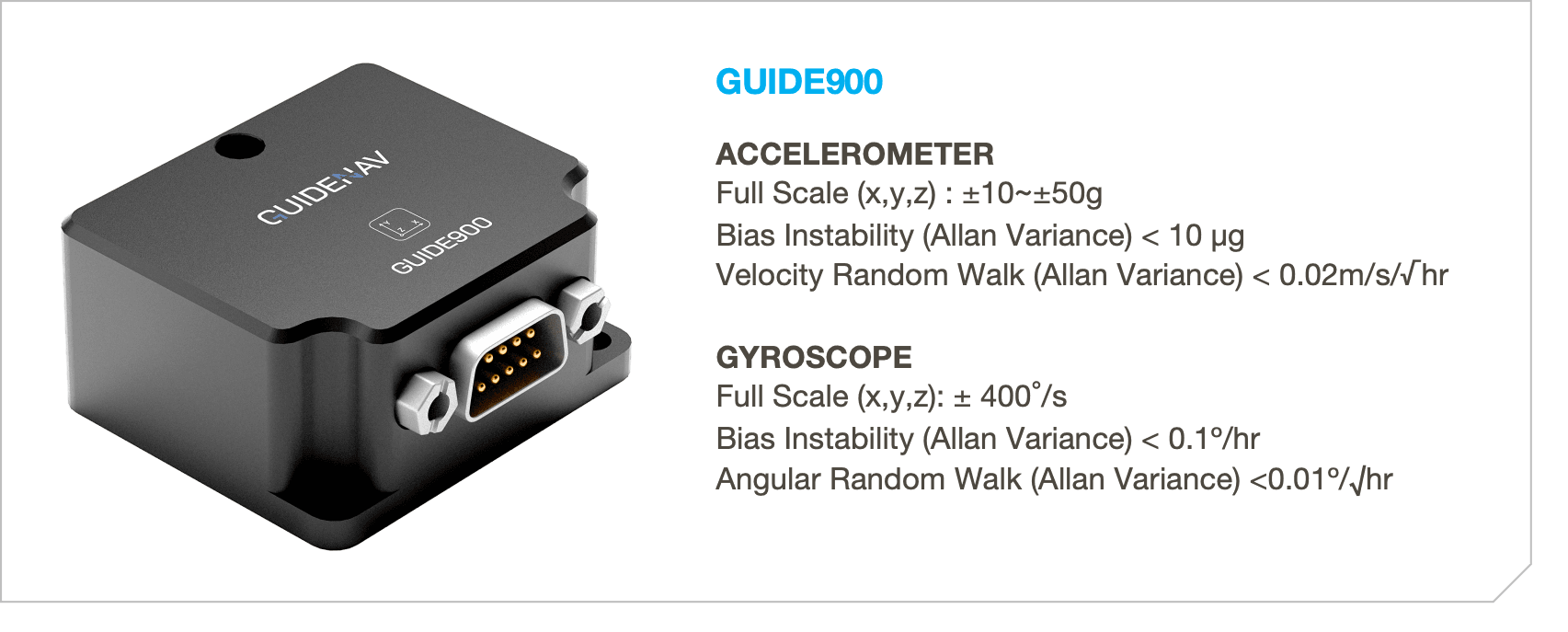
Empfohlener IMU-Typ : MEMS-IMU oder FOG-IMU (abhängig von den Missionsanforderungen)
Empfohlenes MEMS-IMU-Modell: GUIDE900
3. Kostengünstige oder einfachere Missionen (z. B. Angriffe auf Ziele mit geringerem Wert oder bewegliche Ziele)
- Bias-Stabilität : 5°/h bis 2,5°/h
Grund:
- Bei kostengünstigen, zielsuchenden Raketen oder weniger kritischen Zielen kann die Genauigkeit der IMU reduziert werden, insbesondere wenn die Flugzeit kurz oder die Missionskomplexität gering ist.
- Diese Systeme stützen sich möglicherweise stärker auf die Navigation der Plattform (z. B. UAV) oder einfache Onboard-Sensoren, wodurch der Bedarf an hochpräzisen IMUs reduziert wird.
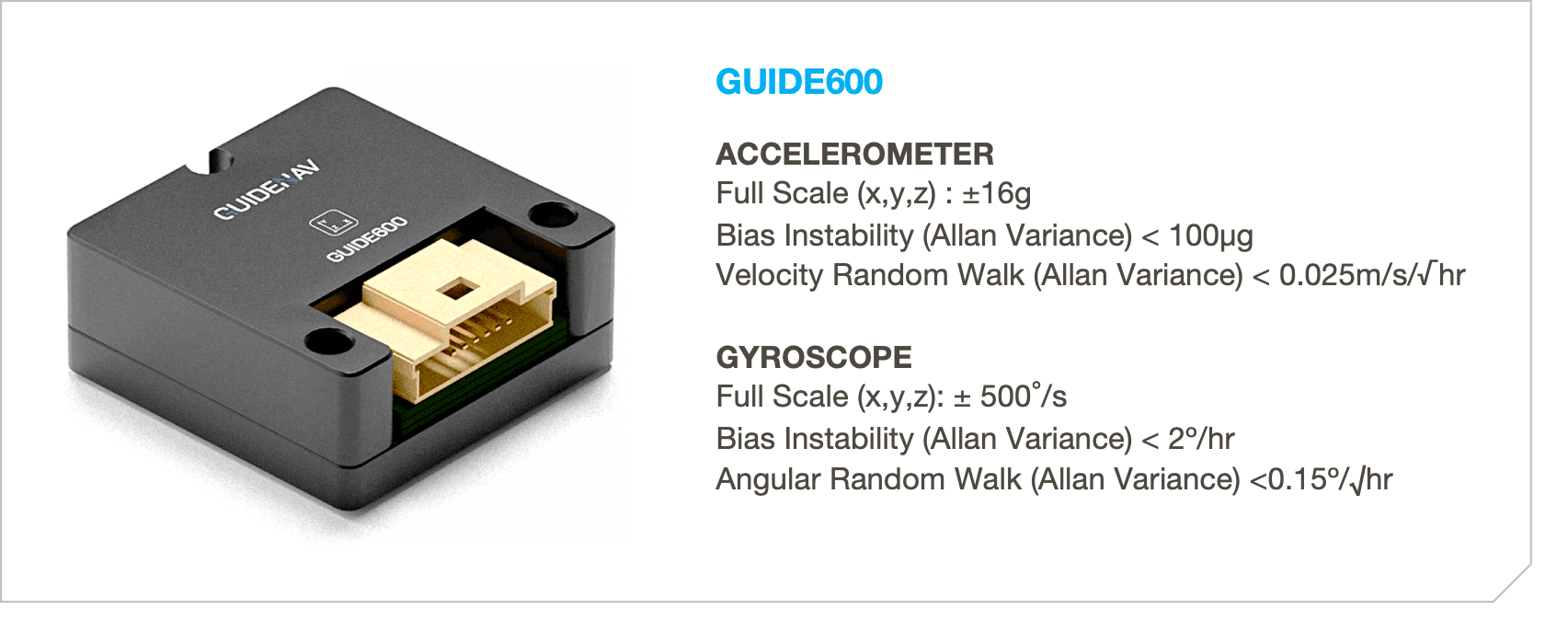
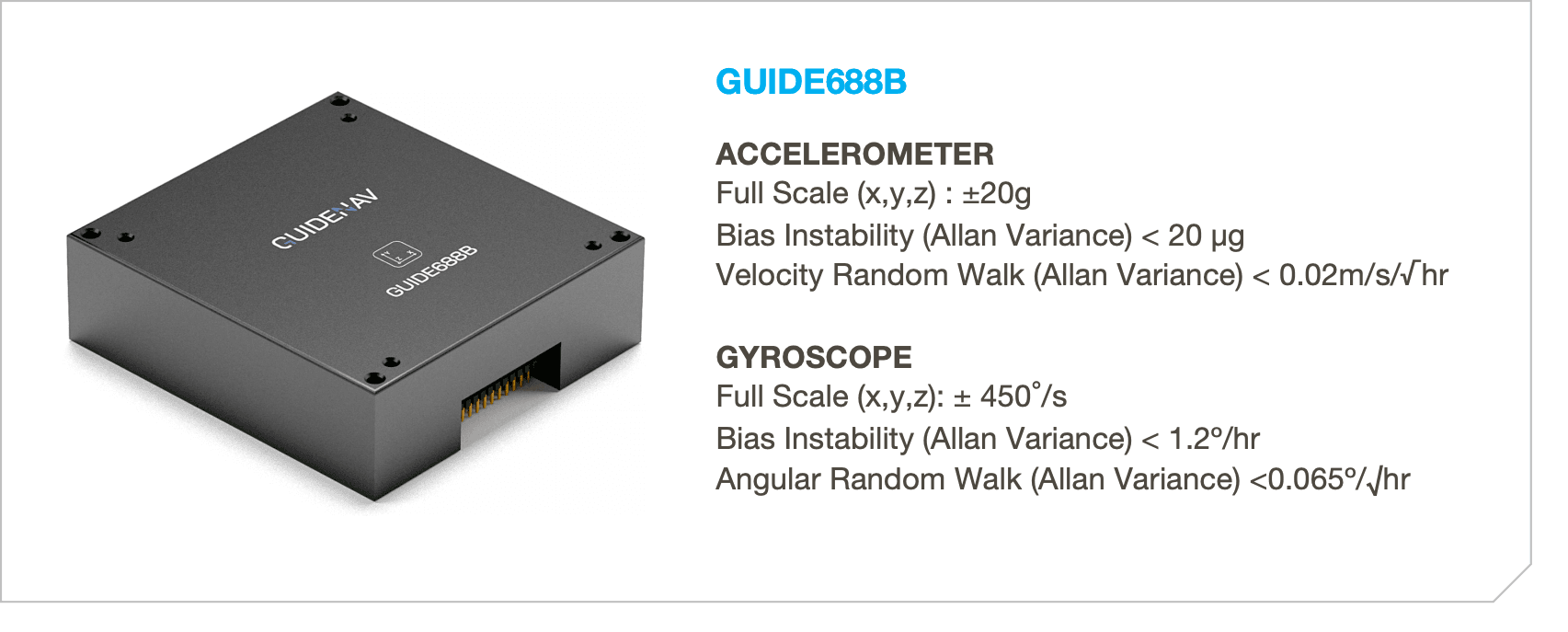
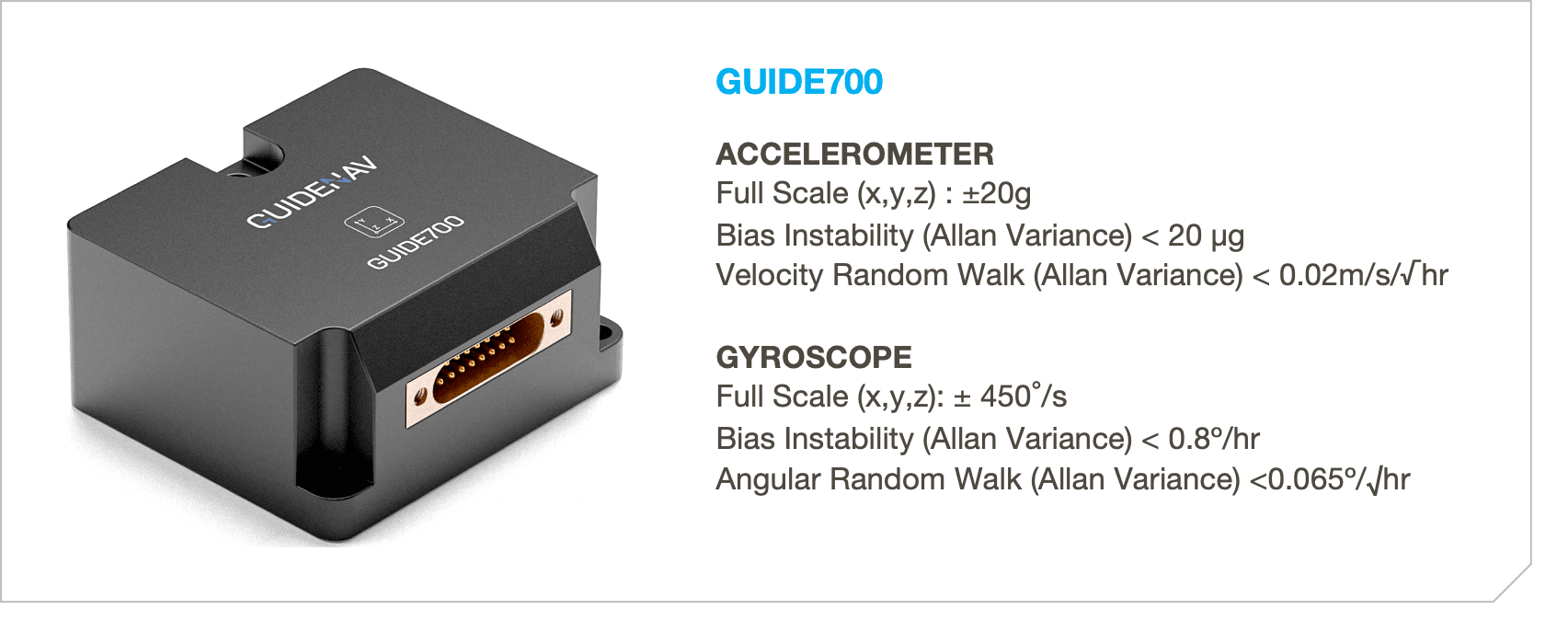
Empfohlener IMU-Typ : MEMS-IMU
Empfohlene MEMS-IMU-Modelle: GUIDE700, GUIDE 688 B , GUIDE 600
4. Sensorabhängige Missionen (z. B. die Nutzung externer Sensoren zur Zielerfassung)
- Bias-Stabilität : 5°/h bis 5°/h
Grund:
- Bei Missionen, die stark von externen Sensoren (z. B. visuellen, Radar- oder GPS-Sensoren) abhängig sind, kann die Genauigkeit der IMU vernachlässigt werden, da die externen Systeme den größten Teil der Navigation und Führung übernehmen.
- Die IMU dient hauptsächlich als zusätzlicher Sensor, wobei der Erfolg der Mission primär auf externen Daten beruht.
Empfohlener IMU-Typ : MEMS-IMU
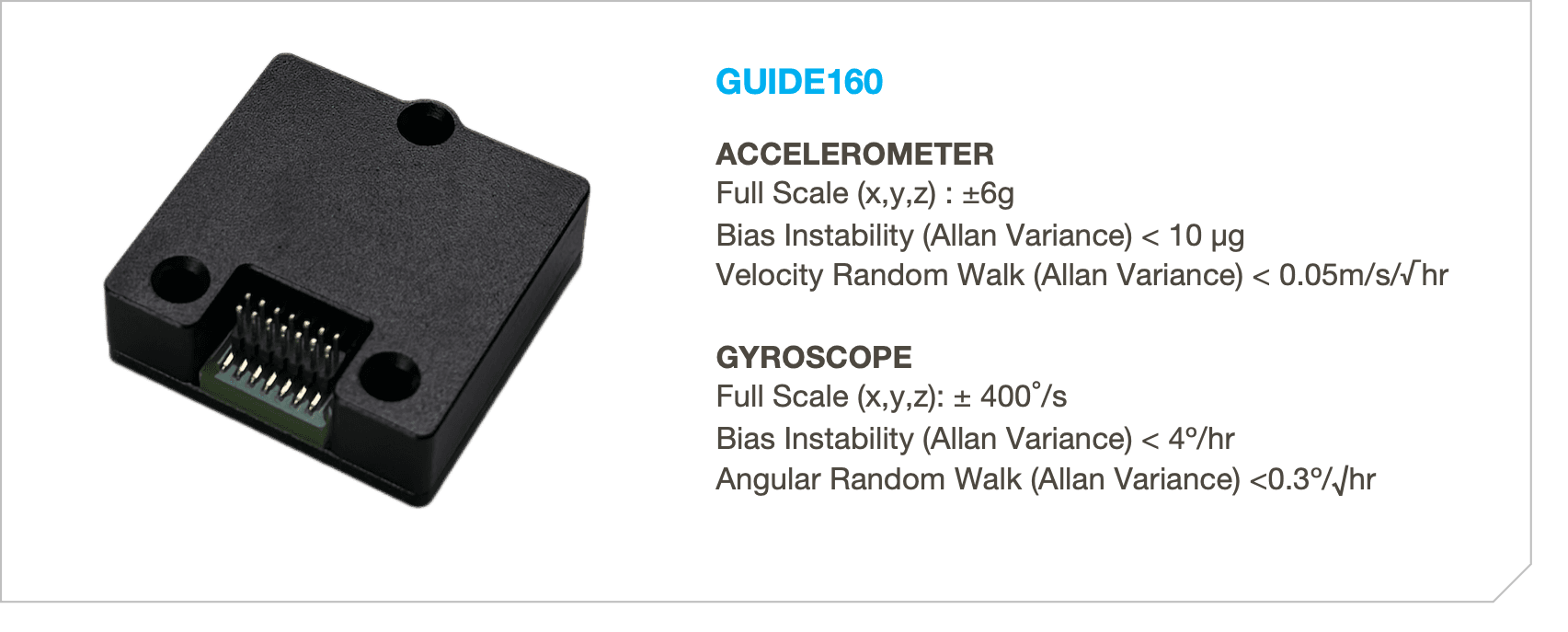
Empfohlenes MEMS-IMU-Modell: GUIDE160
Referenzen
Bei Raketensystemen geht es bei hochpräzisen Daten nicht nur darum, die Rakete [^1] zu einem allgemeinen Zielort zu steuern.
[^1]: Die Erforschung der Mechanismen hinter der Lenkung der Rakete bietet Einblicke in fortschrittliche Raketenlenktechnologien und deren operative Effizienz.
die wichtigsten Kennzahlen für Loitering-Raketenanwendungen [^2]
[^2]: Das Verständnis der wichtigsten Kennzahlen für Loitering-Missionsanwendungen kann Einblicke in deren operative Effektivität und strategischen Wert geben.