Die Navigation unter Wasser ist gnadenlos. Ohne GPS-Signale sind Unterwasserfahrzeuge vollständig auf Trägheitssensoren angewiesen, um ihre Position zu bestimmen. Schon geringe Abweichungen pro Minute können sich über lange Missionen zu Fehlern von mehreren Kilometern summieren. Für Betreiber, die Pipelines kartieren oder Tiefseegebiete erkunden, können solche Abweichungen zu Fehlmissionen, höheren Kosten und Sicherheitsrisiken führen. Daher ist die Wahl zwischen faseroptischen Gyroskopen (FOG) und MEMS-IMUs so entscheidend.
FOG-Gyroskope gewährleisten eine extrem niedrige Drift und Langzeitstabilität unter GNSS-freien Unterwasserbedingungen, während MEMS-IMUs kompakte, energiesparende Alternativen bieten, die besser für kurzzeitige Inspektionen und kostensensible Plattformen geeignet sind.
Die Debatte zwischen FOG- und MEMS-Sensoren dreht sich nicht um die Frage, welche Technologie neuer ist, sondern darum, welche den harten Bedingungen der Unterwassernavigation wirklich standhält. Durch den Vergleich ihrer Leistungsfähigkeit hinsichtlich Genauigkeit, Umweltbeständigkeit, Vibrationstoleranz, Größe, Gewicht und Leistungsaufnahme (SWaP) sowie Lebenszyklusfaktoren können wir die Stärken und Schwächen jeder Technologie aufzeigen. Diese strukturierte Betrachtung hilft Anwendern, den passenden Sensor für die jeweilige Unterwassermission auszuwählen.
Inhaltsverzeichnis
Genauigkeit und Drift bei Langzeitmissionen: Welcher Sensor schneidet besser ab?
FOG Performance
FOG-Sensoren nutzen den Sagnac-Effekt zur Messung der Winkelgeschwindigkeit unabhängig von mechanischen Bauteilen. Diese Bauweise ermöglicht extrem niedrige Driftraten von oft <0,05 °/h und sorgt so für hohe Stabilität bei Missionen von 6–10 Stunden oder länger. Bei der Unterwasserkartierung oder Pipelineinspektion gewährleisten FOG-ausgestattete AUVs zuverlässige Kursbestimmungen ohne ständige externe Aktualisierungen und somit präzise Messungen und effiziente Missionen.
MEMS-Leistung
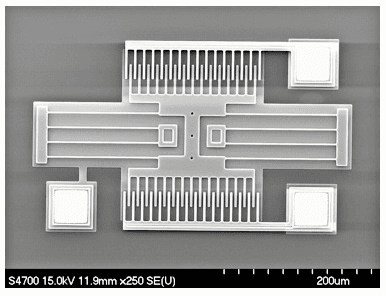
MEMS-Gyroskope messen Rotationen mithilfe vibrierender Strukturen. Trotz Verbesserungen liegt ihre Bias-Instabilität weiterhin im Bereich von 1–10 °/h , was in GNSS-freien Umgebungen zu erheblichen kumulativen Fehlern führt. MEMS-Einheiten eignen sich für kurze Tauchgänge oder Inspektionsaufgaben von unter einer Stunde, doch bei längeren Tauchgängen erfordert die Driftakkumulation häufige Korrekturen mittels DVLs, USBLs oder akustischer Baken. Diese Abhängigkeit schränkt die Autonomie bei Tiefseeoperationen ein.
Vergleich
FOG : Unübertroffene Stabilität, geeignet für Langzeituntersuchungen.
MEMS : Nur für kurzreichweitige und zeitlich begrenzte Missionen geeignet.
Urteil : FOG ist die überlegene Wahl, wenn Genauigkeit über die Zeit missionskritisch ist.
Umweltbeständigkeit: Welche Technologie hält extremen Druck- und Temperaturbedingungen unter Wasser stand?
Robustheit gegenüber Nebel
FOGs nutzen optische Spulen und Halbleiterelektronik und sind daher von Natur aus unempfindlich gegenüber Druck, Salzgehalt und starken Temperaturschwankungen . Da keine vibrierenden Strukturen zum Einsatz kommen, hat der Druck in der Tiefe nur minimale Auswirkungen auf die Leistung. Temperaturdrift ist vorhersehbar und kann werkseitig kompensiert werden, wodurch eine gleichbleibende Kursgenauigkeit auch in arktischen oder tropischen Gewässern gewährleistet wird.
Robustheit von MEMS
MEMS-Sensoren basieren auf Silizium-Mikrostrukturen, die empfindlich auf Wärmeausdehnung, Spannungen und Druckschwankungen . Unterwasserbedingungen – insbesondere schnelle Temperaturänderungen oder hoher Salzgehalt – können ihre Bias-Stabilität und die Linearität des Skalierungsfaktors beeinträchtigen. Kompensationsalgorithmen und Verkapselung helfen zwar, dennoch ist bei veränderten Umgebungsbedingungen in der Regel eine aktive Neukalibrierung von MEMS erforderlich.
Vergleich
FOG : Robuster bei langfristiger Einwirkung von Unterwasserumgebungen.
MEMS : Empfindlich gegenüber Umwelteinflüssen, erfordert häufige Korrekturen.
Fazit : FOG bleibt die zuverlässige Option für Tiefseemissionen, während MEMS für flache oder kontrollierte Umgebungen geeignet ist.

Vibration und Schock: Welcher Sensor behält seine Stabilität unter dynamischen Belastungen?
FOG-Stabilität
FOG-Gyroskope, die keine beweglichen mechanischen Teile besitzen, sind naturgemäß weniger anfällig für vibrationsbedingte Fehler. In Unterwasserplattformen wie AUVs, die in der Nähe von Meeresströmungen operieren, oder ROVs, die Werkzeuge handhaben, liefern FOGs auch bei konstanten Mikrovibrationen oder plötzlichen Stößen stabile Messwerte. Ihre optische Konstruktion gewährleistet, dass dynamische Lasten nur minimalen Einfluss auf die Messgenauigkeit und den Skalenfaktor haben. Daher werden FOGs in Minenabwehrsystemen der Marine und im Offshore-Bau eingesetzt.
MEMS-Stabilität
MEMS-Sensoren sind trotz ihrer robusten Mikrobauweise anfälliger für Vibrationsrauschen und Stöße . Vibrationen können unerwünschte Frequenzen aufnehmen, was zu falschen Winkelgeschwindigkeitsmessungen oder vorübergehenden Instabilitäten des Ausgangssignals führen kann. Obwohl Dämpfungs- und Filtertechniken die Leistung verbessern, benötigen MEMS-Gyroskope oft eine aufwendige Signalverarbeitung, um in Umgebungen mit starken Vibrationen, wie beispielsweise bei antriebsgetriebenen Unterwasserdrohnen, eingesetzt werden zu können.
Vergleich
- FOG : Liefert stabile Messwerte auch bei Vibrationen und plötzlichen Stößen und minimiert so die Fehlerfortpflanzung.
- MEMS : Leicht, aber anfällig für vibrationsbedingte Störungen, die eine aufwendige Filterung erfordern.
- Fazit : Für Plattformen, die Turbulenzen, propellerbedingten Vibrationen oder Unterwasserwerkzeugoperationen ausgesetzt sind, bietet FOG eindeutig die stabilere und zuverlässigere Lösung.
Größe, Gewicht und Stromverbrauch: Welcher Sensor passt zu Plattformen mit begrenzten Abmessungen, Gewicht und Leistungsaufnahme?
FOG SWaP-Eigenschaften
Herkömmliche FOG-Sensoren verfügen über größere optische Spulen und einen höheren Stromverbrauch . Selbst mit den jüngsten Miniaturisierungen kann ein taktischer FOG-Sensor mehrere hundert Gramm wiegen und mehrere Watt verbrauchen. Bei kleinen AUVs oder ROVs mit begrenzter Batteriekapazität kann dies die Reichweite oder Nutzlastkapazität verringern. Bei mittelgroßen bis großen Unterwasserfahrzeugen rechtfertigt die unübertroffene Genauigkeit und Stabilität jedoch häufig den höheren Stromverbrauch.
MEMS SWaP-Eigenschaften
MEMS-IMUs sind von Natur aus kompakt, leicht und energieeffizient . Viele taktische MEMS-Einheiten wiegen unter 50 Gramm und verbrauchen weniger als 1 Watt. Dadurch eignen sie sich ideal für kleine Inspektionsdrohnen, tragbare Tauchernavigationsgeräte oder Nutzlasten, bei denen jedes Gramm und jeder Milliampere zählt. Ihre geringe Größe ermöglicht die Integration in beengte Gehäuse und somit flexible Fahrzeugkonstruktionen.
Vergleich
- FOG : Sperriger und energiehungriger, am besten geeignet für Plattformen mit ausreichend Platz und Energiebudget.
- MEMS : Optimiert für Systeme mit begrenzten Abmessungen und Leistungsaufnahme, ermöglicht leichte und energieeffiziente Designs.
- Fazit : Wenn Kompaktheit und Effizienz oberste Priorität haben, ist MEMS die naheliegende Wahl; für Missionen, bei denen Genauigkeit wichtiger ist als Ausdauer, bleibt FOG der Maßstab.

Integration mit Unterwasser-Hilfsmitteln: Welcher Sensor eignet sich am besten für DVL und USBL?
FOG-Integration
FOG-Gyroskope liefern eine hochstabile Referenz , die die Leistung von Doppler-Geschwindigkeitslogs (DVL), Ultra-Short-Baseline- (USBL) und Long-Baseline- (LBL) akustischen Systemen deutlich verbessert. Da die FOG-Ausgaben über die Zeit präzise bleiben, können Hilfssensoren seltener aktualisiert werden, wodurch Navigationsfehler selbst bei intermittierenden oder teilweise blockierten akustischen Signalen reduziert werden. Diese Synergie macht FOG-basierte INS-Lösungen zum Standard für Vermessungs-AUVs und Langzeit-Unterwassermissionen.
MEMS-Integration
höheren Drift- und Bias-Instabilität stärker auf externe Hilfsmittel angewiesen . Obwohl sie sich dank ihres leichten und digitalfreundlichen Designs problemlos in DVLs und USBLs integrieren lassen, erhöht der häufige Korrekturbedarf die Systemabhängigkeit von akustischen Aktualisierungen. In Umgebungen mit Rauschen oder Signalstörungen kann die MEMS-basierte Navigation Sprünge oder eine verminderte Positionsgenauigkeit aufweisen, sofern sie nicht durch fortschrittliche Sensorfusionsalgorithmen unterstützt wird.
Vergleich
- FOG : Bietet ein stabiles Rückgrat für Unterwasser-Hilfssysteme und reduziert die Abhängigkeit von häufigen Korrekturen.
- MEMS : Einfach zu integrieren, erfordert jedoch ständige externe Aktualisierungen, um Abweichungen auszugleichen.
- Fazit : Bei Missionen, bei denen akustische Aktualisierungen unzuverlässig sein können, ist FOG die sicherere Wahl; MEMS kann ausreichen, wenn externe Unterstützung gewährleistet und häufig ist.
Von Driftstabilität über Umweltbeständigkeit, Vibrationstoleranz, SWaP bis hin zur Systemintegration – der bisherige Vergleich macht deutlich, dass FOG MEMS in anspruchsvollen Unterwasserbedingungen im Allgemeinen überlegen ist, während MEMS für leichtere und kürzere Missionen eine praktikable Wahl bleibt.
Die Leistung allein reicht jedoch nicht aus, um die richtige Lösung zu finden. Kosten, Wartungsaufwand, Datenqualität und bewährte Anwendungsfälle sind bei der Auswahl eines Sensors für Unterwasserplattformen ebenso entscheidend. In Teil II setzen wir diese Untersuchung fort und betrachten die Wirtschaftlichkeit über den gesamten Lebenszyklus, die Wartung, die Zuverlässigkeit der Kartierung und reale Anwendungsfälle – bevor wir eine endgültige Entscheidung darüber treffen, welche Technologie sich unter Wasser besser bewährt.
